雙饋風電系統的建模仿真研究與設計
2019-09-12 10:41:42王坤周克
智能計算機與應用 2019年4期
王坤 周克


摘 要:雙饋風電系統的建模仿真對其運行原理、故障診斷及預測等研究具有很大便利性。文中在對風電系統數學模型進行分析和理論闡述的基礎上,在Matlab/Simulink中建立其正常動態下的仿真模型,并通過加入故障塊實現轉子短路故障的仿真;通過將模型整體進行Mask封裝設計其GUI和代碼生成的方式,提高模型的便捷性和可移植性,便于仿真不同參數的系統和實現結合嵌入式等系統進行研究使用。通過仿真結果表明,文中所建模型具有很好的合理性及適用性,能很好仿真雙饋風電系統的實際運行情況,可為風電系統的研究提供一個良好的模型基礎。
關鍵詞:雙饋風電系統;Matlab/Simulink;轉子短路故障;GUI文章編號:2095-2163(2019)04-0055-06 中圖分類號:TM315 文獻標志碼:A
0 引 言
雙饋式風力發電由于其變速恒頻的優越性能,成為目前中大型風電機場的主流系統。對其控制策略以及對軸承、風電機等部件的故障診斷與預測一直是研究的熱點[1]。在許多情況下,實際的物理系統不便于直接進行研究使用,故而常常需要通過建模仿真的形式來對建立的算法理論進行驗證和優化。
目前,對于風電系統的建模主要有基于GH Bladed、Matlab/Simulink、Ansys以及PSCAD等[2]。其中,GH Bladed側重的是風機的性能及載荷計算方面設計、Matlab/Simulink偏向于控制算法的驗證以及理論的研究、Ansys主要便于電磁分析以及對電機內部的設計研究、PSCAD則側重于電磁暫態的仿真與計算。文中選用熟悉度廣、可移植性強的Matlab/Simulink作為建模平臺,其模塊庫中含有大量封裝模塊可直接進行調用,非常便于模型的搭建。在大多數對風電系統研究的文獻中,較多的是著重于控制策略的對比及優化研究,比如文獻[3]和[4];對于系統的建模方面,如文獻[5]、[6]等僅對PWM整流器部分的實現及控制策略展開了探討,卻并未考慮整個風電系統模型;文獻[7]、[8]等雖對整個風電系統進行了分析研究,但對于模型仿真的便捷性和模型的可移植性未加考慮,對于模型的后續研究使用等較為不便。
由此,文中在保證模型合理性的前提下,最大程度上利用Simulink中相應的封裝模塊來調節參數、并構建雙饋風電系統的整體模型,以降低建模過程的復雜性、提高建模效率;接下來,通過設計GUI的方式實現模型仿真的簡便運行、參數的快速修改和仿真數據的直接保存;最后對模型進行仿真,驗證了模型的合理性、正確性,同時也一并給出了模型的生成代碼,提高模型的可移植性。對此擬做闡釋詳述如下。
1 數學模型
1.1 風速及風輪方程
整個雙饋風電系統可大致分為:風能轉化為機械能部分、機械能轉化為電能部分和控制轉化過程部分,主要包括風輪、驅動鏈、發電機及控制器等。
風速帶有很大的隨機性,其變化受地區、天氣、時間、季節以及地形等多種因素影響。常用的模型有:
(1)采用紊流和平均風相結合來模擬的風速[9]。
(2)采用階躍風、平均風、隨機風及陣風等進行組合模擬的風速。
根據研究側重點的不同,可以得出相應的組合選擇。文中將要仿真雙饋電機的轉子短路故障,故而簡化風速模型,盡可能不考慮風速隨機特性對故障的影響,這里就采用了階躍風的形式,即:
風輪是將風的動能轉化為機械能的部件,是整個系統能量轉化的開始,主要用于將風能轉變為機械轉矩Tm輸出到雙饋電機中。相應的參數方程為:
在一般情況下,并不需要研究齒輪箱的機械性能及應力分布情況,所以通常可簡化模型使其作用等效于其齒輪增速比kgear的值。
1.2 雙饋風電機方程
風電機是將風輪所產生的機械能轉化為電能的核心設備,可以通過輸入的風輪轉矩計算出相應的電參量。為便于系統的分析和模型搭建,通常對雙饋電機做出如下假設[8]:
(1)不計溫度、頻率對電機相應參數值的影響,忽略空間諧波、磁飽和及鐵芯損耗。
(2)定、轉子繞組對稱分布,采用Y型連接且自感和互感為固定值。
(3)轉子側皆折算至定子側且折算后繞組匝數比為1。
由于常規三相坐標下雙饋風電機數學模型的非線性、多變量和強耦合性等特點[10],在求解分析過程中非常繁瑣,通常采用坐標變換的方式進行解耦處理,以簡化參數方程便于系統的建模分析,同時實現對系統的矢量控制,文中采用Park變換(即3s/2r變換),經變換后的雙饋電機電壓方程為:
1.3 控制系統方程
功率變換器是實現雙饋風電系統變速恒頻的關鍵部件[11],目前多是采用背靠背型雙PWM的部分功率變換器,分為轉子側變換器(RSC)和網側變換器(GSC)兩部分。其中,RSC主要完成變速恒頻的控制方案,實現對有功功率P和無功功率Q的解耦以及為雙饋電機提供勵磁,GSC主要保證直流母線DC的電壓穩定和單位功率因數運行,以便有良好的電流輸入性能。
文中采用三相電壓型變換器,網側PWM采用基于網側電壓定向的矢量控制方式,轉子側PWM采用基于定子磁鏈定向的矢量控制方式。定向后主要的參數方程為:
空間矢量脈寬調制(Space Vector PWM, SVPWM)是根據變換器空間電壓或電流矢量切換來操縱變換器各種功能作用的一種控制方式[9]。而與其它的調制技術相比,該技術有著電壓利用率高、動態性能好以及諧波抑制能力強等一系列優點,被廣泛運用到電機的矢量控制中。
文中采用空間電壓矢量調制的實現方式,主要參數方程為:
2 建模及GUI設計
2.1 模型搭建
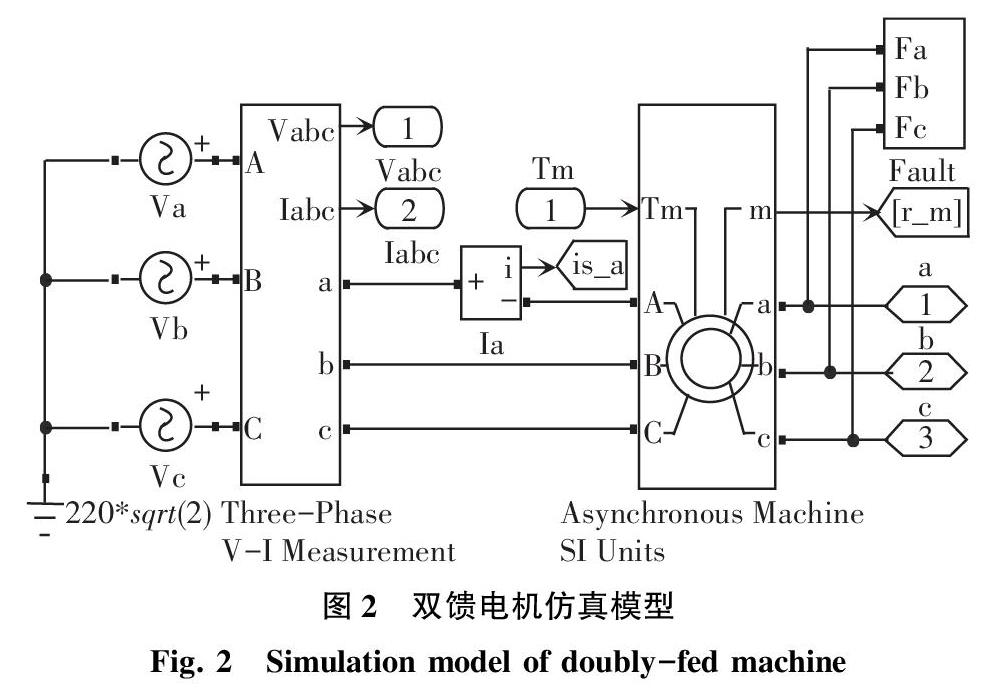
由上述分析,根據式(1)和(2)可在Matlab/Simlink中建立風速及風輪部分仿真模型,如圖1所示。由式(3)~(5)可搭建出雙饋風電機的仿真模型,在Simulink Library Browser的Simscape/Power Systems/Machines中有相應的電機封裝模塊,只需在其中合理設置仿真參數便可直接進行調用,在很大程度上可以提高建模的效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
