分布式驅動電動汽車轉矩協調控制策略研究
2019-09-11 03:01:46王子銘劉勇鮑俊屹
汽車實用技術 2019年16期
關鍵詞:模型
王子銘,劉勇,鮑俊屹
(南京航空航天大學自動化學院,江蘇 南京 211106)
引言
隨著世界汽車工業的不斷發展,新能源汽車在汽車市場上的地位日益上升,其逐漸成為實現交通可持續發展的一種可靠選擇[1]。研究電動汽車在轉向時的轉矩分配策略,將極大地提高電動汽車在低速行駛時的操縱性,以及高速行駛時的穩定性,具有重要意義。
1 輪轂電機控制目標分析
由阿克曼模型可知:車輛轉向時,各車輪的速度是相互關聯的,在轉向角和車身結構確定的情況下,改變一個車輪的速度即會影響其他車輪的速度,各車輪之間存在較強的耦合性,不利于發揮分布式驅動電動汽車各車輪可獨立控制的優勢,因此不選用電機的轉速控制。
而轉矩控制則直接控制摩擦力,在不違背電子差速原理的前提下,控制輪胎的滑移率,改善行駛狀態,因此本文選擇電機轉矩作為輪轂電機的主要控制目標。
2 轉矩協調控制策略分析
2.1 轉矩協調控制總策略
本文的控制策略應能實現以下兩個目標:
(1)直線正常行駛,轉矩平均分配,可以獲得較好的動力性能。
(2)汽車轉向時,依據車身穩定性分析對四輪轂電機轉矩協調控制,增加行駛穩定性。
依據上述目標獲得轉矩協調控制總策略圖1。其中δ為車輛轉向角,θac 為油門踏板開度,γ為車身橫擺角速度,β為車身質心側偏角,γex為理想橫擺角速度,T1、T2、T3、T4 分別為四個輪轂電機的轉矩值。
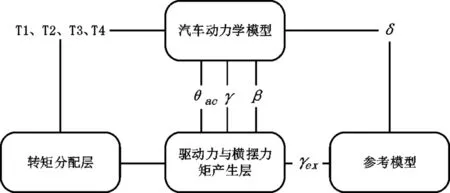
圖1 轉矩協調控制總策略圖
在具體的模塊選擇上,動力學模型選擇CarSim 進行建模,參考模型選擇二自由度模型,驅動力與橫擺力矩產生層選擇模糊控制器進行控制,轉矩分配層依據轉角進行合理分配,具體內容在后續幾小節給出。
2.2 車輛二自由度模型
選擇橫擺角速度的理想值與實際值的誤差Δγ與質心側偏角理想值與實際值的誤差Δβ作為控制輸入變量,可以確定目標橫擺力矩的大小。二自由度的車輛模型如圖2 所示:
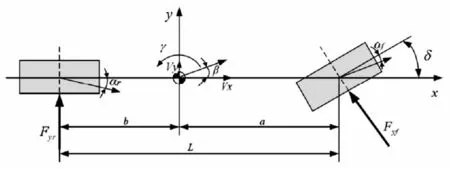
圖2 二自由度車輛模型
根據以上分析,可以得到汽車二自由度模型的動力學方程:

式(1)和式(2)中,Fy 表示側向力的合力,Mz 表示繞z 軸的合外力矩。此時,考慮車輛輪胎的側向力的情況,即考慮輪胎的側偏剛度和輪胎的側偏角的大小,可得:
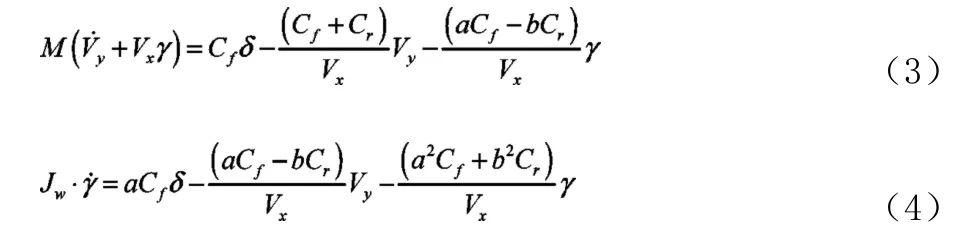
式中Cf和Cr分別表示車輛前后輪的側偏剛度(N/rad),a、b 分別表示前、后軸中點到質心的距離(m),其他物理量與前文一致。
2.3 目標橫擺力矩確定方法
由于車輛行駛情況較為復雜,且二自由度模型是簡化了的線性模型,當輪胎的側偏特性不滿足線性時,會出現較大的誤差,我們很難建立準確的數學模型對橫擺力矩進行控制,因此在本文的控制器設計中,采用了基于模糊邏輯的控制方法[2][3]。
本文中的隸屬度函數有三個,即Δγ、Δβ和的ΔM 隸屬度函數,均選用了最常用的三角形隸屬度函數trimf。
在定義三個變量的隸屬度函數中,將橫擺角速度的偏差值Δγ設置其論域為[-1,1],共定義了七檔,每檔跨度為0.67,模糊子集為{NB NM NS ZE PS PM PB};質心側偏角的偏差值Δβ設置其論域為[-1,1],也同樣定義了七檔,每檔跨度為0.67,模糊子集為{NB NM NS ZE PS PM PB};附加橫擺力矩ΔM 是輸出量,為其設置的論域是[-1,1],共定義了9 檔,模糊子集為{NVB NB NM NS ZE PS PM PB PVB},每檔中的三角形跨度為0.5。
2.4 轉矩分配策略
車輛轉向時,外側前輪產生的力都增強車身橫擺力矩,內側后輪產生的力都減少橫擺力矩,控制這兩個輪的轉矩大小可對車輛橫擺力矩產生最有效的控制效果,即雙輪控制模式。
在雙輪模式下,當車輛轉向不足時,外側前輪增加ΔT的轉矩,內側后輪減小ΔT 的轉矩;當轉向過度時,外側前輪減小ΔT 的轉矩,內側后輪增加ΔT 的轉矩。二者在改變車身橫擺力矩的同時,并沒有減少車輛縱向的驅動力,為一種較為平滑緩和的控制方式。
在得到附加橫擺力矩值后,根據車輪和車身尺寸,即可得到相應輪胎附加轉矩值。

3 CarSim&MATLAB 聯合仿真結果
3.1 動力學建模
本文車輛的動力學模型由CarSim 軟件進行仿真搭建。設置整車參數如下:整車長×寬×高為4250×1880×1480(mm),車身質量為1250kg,軸距為3050mm,輪距為1600mm,輪胎半徑為364mm,輪胎質量為80kg,迎風面積為2.8m2,繞Z 軸的轉動慣量為3234kg·m2。仿真模型通過輸入接口,將外部轉矩直接加在非簧載質量上。
3.2 雙移線仿真結果
在加入轉矩協調控制前后車輛實際的橫擺角速度結果:車輛的理想橫擺角速度幅值為-32.2~23deg/s,在無轉矩協調控制時,車輛的橫擺角速度幅值為-11.43~8.14deg/s;而在施加控制后,橫擺角速度幅值變為-16.89~15.31 deg/s,提高了22.9%。因此,雙輪模式在施加橫擺力矩控制后,使得車輛的橫擺角速度更接近理想值,減小了車身的側傾幅度,有效地提高了車輛的穩定性。
此外,無轉矩協調控制時,車輛在雙移線仿真的第二個轉向與預定軌跡的交點為170.02m 處,在246.23m 處才返回預定軌跡;而在施加控制后,車輛與預定軌跡的交點變為157.85m 處,在208.59m 處即返回預定軌跡。可見轉矩協調控制對車輛的行駛軌跡也有一定改善作用,提高了車輛的靈活性和安全性。
4 結論
在CarSim 軟件中創建車輛動力學模型,在Matlab/Simulink 中建立模糊控制器、輪轂電機、橫擺力矩控制器和轉矩分配器模型,并聯合仿真。目標軌跡與實際軌跡進行對比,發現有控制下的車輛其橫擺角速度更接近理論值,運行軌跡更貼近目標曲線,其表明該控制策略的使用明顯改善了車輛的橫擺角速度和軌跡曲線。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
