國內電動舵機故障診斷綜述
2019-09-10 07:22:44楊碩
河南科技 2019年5期
關鍵詞:故障診斷
楊碩



摘 要:本文在綜合國內文獻的基礎上,首先介紹了電動舵機故障診斷推理方法,指出了各種方法的優缺點,然后探討電動舵機故障診斷推理的應用現狀,最后分析電動舵機故障診斷發展趨勢,以期能為電動舵機故障診斷提供借鑒。
關鍵詞:電動舵機;故障診斷;診斷方法
中圖分類號:TJ760.3 文獻標識碼:A 文章編號:1003-5168(2019)05-0067-05
Abstract: Based on the domestic literature, this paper first introduced the fault diagnosis reasoning methods of electric actuator, pointed out the advantages and disadvantages of various methods, then discussed the application status of fault diagnosis reasoning of electric actuator, and finally analysed the development trend of fault diagnosis of electric actuator, in order to provide reference for fault diagnosis of electric actuator.
Keywords: electric steering gear;fault diagnosis;diagnostic method
電動舵機以其體積小、重量輕、響應快、控制方便等特點在空空導彈、無人飛行器、制導炮彈等領域得到了廣泛應用[1-3]。作為飛控系統的執行機構,電動舵機的工作性能、可靠性等對整個系統具有巨大的影響。如果電動舵機發生故障,將會造成嚴重損失[4-6]。因此,對電動舵機進行故障診斷具有十分重大的意義。
本文對近年來國內電動舵機故障診斷的理論體系、應用、取得的成果等方面進行歸納、總結,并在此基礎上,展望未來電動舵機故障診斷技術的發展方向。
1 電動舵機的組成及其故障診斷
1.1 電動舵機組成及工作原理
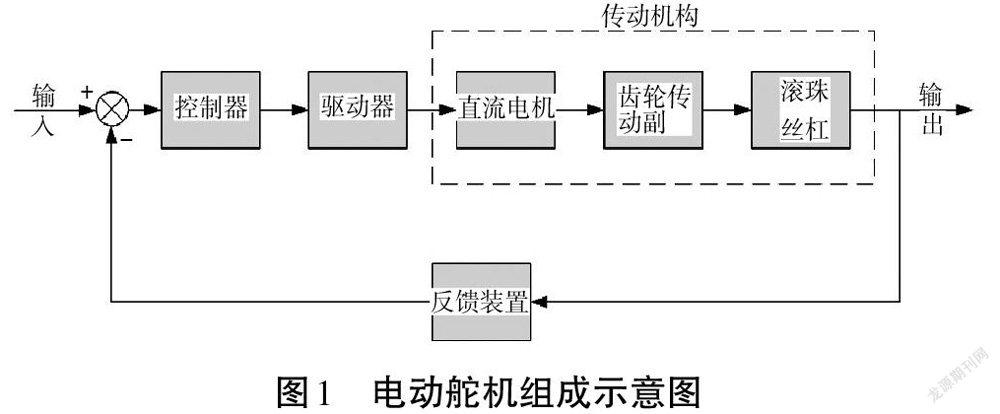
電動舵機是飛行器上重要的伺服機構系統,一般由舵機控制器、電機驅動器、直流電機、齒輪傳動副、滾珠絲杠和反饋裝置等組成,其中直流電機、齒輪傳動副和滾珠絲杠等稱之為舵機的傳動機構。圖1為電動舵機組成示意圖。
電動舵機的工作原理是:電動舵機接受飛控/制導計算機給定的舵面偏角信號,經由電路上的控制電路處理后,生成驅動器邏輯控制信號,由驅動器驅動電機開始轉動,經過齒輪傳動副+滾珠絲杠組成的減速裝置將動力輸出到舵軸,驅動舵面轉動,同時與舵軸相連的位置傳感器(反饋裝置)送回檢測信號,判定舵面是否已經到達位置。
1.2 電動舵機故障診斷
故障診斷系統是指具有故障信息處理和推理、故障評價與決策、故障處理能力的系統,如圖2所示。由于故障診斷信息來源和處理方式不同,故障診斷推理方法也不盡相同,主要有基于模型、基于信號和基于知識三大類。在由故障診斷推理對故障信息進行處理和推理后,故障診斷系統需要識別出故障類型或故障部位,并對故障的程度進行評估,將故障部分進行隔離,隨后向外部發出警報,并可通過冗余控制進行故障隔離后的自修復控制,確保將故障損失降到最小。
2.1 基于模型的故障診斷推理方法
基于模型的故障診斷推理方法的主要工作流程如圖4所示。利用該方法進行故障診斷,大致可分為三步。第一步,尋找合適的觀測器,以得到合適的系統輸出;第二步,將觀測器的輸出與實際系統測量所得值進行比較,生成殘差、等價函數或估計參數;第三步,通過事先設計好的殘差判斷規則對殘差進行分析,從而確定故障類型、產生時間、故障點等,進而給出故障診斷結果。
2.2 基于信號的故障診斷推理方法
基于信號的故障診斷推理方法的主要工作流程如圖5所示。具體流程如下。通過傅里葉變換、小波分析、經驗模態分解等方法對信號進行處理,提取故障信號特征值。由于信號并不能直接反映故障類型、故障部位等,還需引入故障診斷系統。故障診斷系統由神經網絡組成,其輸入值為提取的故障信號特征值,輸出值為故障類型和故障部位等。經過反復對故障診斷系統進行訓練,達到事先設定好的應用標準后即可投入實際故障診斷中。但是,該類方法易受到系統非線性因素和噪聲的干擾[8,9]。
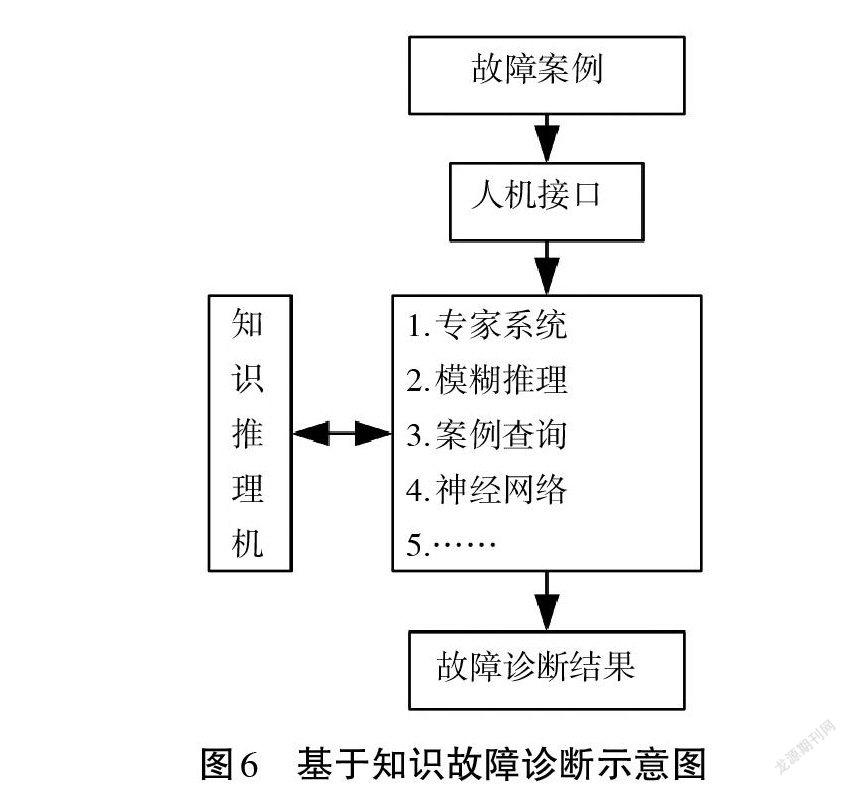
2.3 基于知識的故障診斷推理方法
基于知識的故障診斷推理方法[10]主要是將故障案例通過人機接口傳給知識推理機,由知識推理機經過處理后給出故障診斷結果。知識推理機包括專家系統、模糊推理、案例查詢、神經網絡等多種故障診斷推理方法,也可以是上述故障診斷推理方法的綜合應用。基于知識的故障診斷推理工作流程如圖6所示。
3 電動舵機故障診斷系統的應用現狀
電動舵機的故障診斷應用主要可以分為三大類,一是研究舵機故障模型,以便在真實故障發生后進行故障原因分析,定位故障部位;二是采用仿真手段構建舵機模型,通過對比故障模型與真實系統之間的殘差進行故障診斷。前兩類均屬于離線故障診斷,第三類則是在線故障診斷,在舵機控制系統中實時地將檢測到的電動舵機工作狀態/參數與事先標定好的標準狀態/參數進行比較,實時判斷舵機故障。
3.1 電動舵機故障模型應用
電動舵機的故障與其中各組成部分息息相關,因此,利用各部分的傳遞函數搭建電動舵機的故障模型,對電動舵機傳遞函數故障模型進行分析,得到與故障對應的相關組成部分便成為最常見的電動舵機故障模型。
楊秉巖等[11]構建了包含電動舵機中伺服電機、驅動器、反饋電位器和傳動機構等在內的舵機正向傳遞模型。采用辨識算法對舵機系統頻譜信號中包含的傳遞函數和傳遞函數中各系數進行識別,得到電動舵機的反向傳遞函數。分析舵機正向、反向傳遞函數的數值,進而確定電動舵機是否出現故障以及故障范圍。若反向傳遞函數階數發生變化,可斷定發生了損壞性故障,在故障庫中查找對應的故障類型;如果反向傳遞函數系數發生變化,可斷定發生參數超調性故障,利用參數與元件之間的對應關系來確定故障范圍。
劉昆朋等[12]同樣基于舵機傳遞函數構建故障模型。通過多次仿真,利用舵機自檢信息得到故障閾值,可對舵機的元器件參數故障進行診斷,但并不能覆蓋所有參數故障。
3.2 電動舵機故障殘差分析應用
利用殘差對電動舵機進行故障診斷是目前普遍使用的故障診斷方法。通過殘差的獲得手段、分析方法等可將其分為觀測器、半實物仿真、閾值等不同的利用殘差進行故障診斷的具體應用。
3.2.1 觀測器故障診斷。一般來說,電動舵機的故障類型較多,采用單一的觀測器不能覆蓋所有的故障類型。對于該問題,主要有兩種解決方法:一種是構建多個觀測器,分別對應不同的故障類型;另一種是構建自適應觀測器,自動適應不同的故障類型。張棟等[13]設計了多觀測器切換機制,以解決多個觀測器的選取問題,使舵機故障狀態能及時準確地被切換到最合適的觀測器,給出最接近實際情況的故障信息。廖瑛等[14]則通過構造自適應觀測器獲取反映系統故障的殘差信息,針對該系統出現的故障,利用序列概率比方法進行故障決策。
為了解決觀測器構建困難的問題,史賢俊等[15]將神經網絡作為故障觀測器。利用徑向基函數神經網絡的結構簡單、收斂速度快、非線性映射能力強和魯棒性等特點,通過粒子群優化算法選取神經網絡參數,經過參數優化和訓練后的徑向基函數神經網絡可有效識別出舵機的相關故障。
3.2.2 半實物仿真殘差的故障診斷。由于建立精確的模型較為困難,為較為簡便地獲取等效模型,有學者提出了利用dSPACE與電動舵機執行機構進行半實物仿真,通過參數識別來獲得舵機的等效模型,以避免模型不準確造成虛檢和漏檢。
邱聚能等[16]采用搭建故障觀測器的思路,提出了一種基于子空間辨識的卡爾曼濾波故障檢測方法,借助于dSPACE半實物仿真工具,搭建了電動舵機故障檢測半實物仿真平臺,實現了未知參數電動舵機的在線故障檢測和快速故障分析。
3.2.3 殘差閾值的故障診斷。閾值分析法的關鍵是殘差閾值的設定,若設定的閾值過小,則當系統存在噪聲干擾或者解析模型存在偏差時,會做出存在故障的錯誤判斷,造成虛警;若設定的閾值過大,則當系統發生故障時,殘差小于閾值,造成漏檢或診斷不夠實時。
殘差閾值的確定通常有如下幾類方法。①簡單閾值。為了減少計算量,縮小誤警,該類情況在設定閾值的基礎上進行適當放大。如史賢俊等人的研究[15]就將訓練所得閾值的3倍作為故障報警閾值。②數學分析方法。利用該類方法獲得閾值,需要對殘差進行一定的數學計算。如王鵬[17]等利用一元線性回歸分析方法對殘差的閾值進行計算。李勇[18]等則將閾值與改進序貫概率比算法相結合,以迅速診斷出階躍性故障和緩變性故障。③人工智能方法。梁瑞勝[19]等采用BP神經網絡對閾值進行訓練,有效實現了故障的診斷和定位。
3.3 電動舵機實時故障診斷應用
3.3.1 模糊聚類實時故障診斷。章家保等[20]在對電動舵機致命性故障進行實時檢測/診斷時,采用模糊聚類方法。對電動舵機正常工作時的狀態數據通過歸一化處理和模糊計算,得到隸屬度矩陣和聚類中心矩陣。在電動舵機實際工作中,計算每個控制周期的舵機狀態樣本與舵機標準樣本聚類中心之間的距離,進而進行故障檢測/診斷,具有實時性強、準確率高的特點。但是,該方法只適用于對減速器卡死、電機故障、傳感器故障等致命性故障進行檢測/診斷,對于非致命性、偶發性、緩慢性故障,由于尚未取得標準狀態樣本數據,故不適用。
3.3.2 特征模型實時故障診斷。為避免真實系統與數學模型之間建模造成的誤差,朱紀洪等[21]通過建立電動舵機特征模型的方法將建模誤差降到最小,使特征模型與實際對象在面對相同的控制輸入時,兩者的輸出是“等價”的。由此,可以避免控制飽和、負載擾動造成的虛警。
在實際工作中,對電動舵機速率和位置數值進行積分計算,將其與速率閾值和位置閾值進行比較,一旦超過閾值,即進行報警。
3.3.3 半實物仿真實時故障診斷。李云龍等[22]將舵機的輸入電壓作為故障信號源,通過在dSPACE中構建相應的舵面卡死/損傷故障模式,獲取相關數據。對相關數據進行實時分析,在0.25s內給出診斷結果,實時性較好。
4 電動舵機故障診斷發展趨勢
隨著信號處理、新型仿真軟件、人工智能、數據挖掘等技術的不斷發展,電動舵機的故障診斷也呈現出新的發展趨勢,主要表現在以下幾方面。
4.1 傳感器故障診斷
與通過解析模型進行多種類型故障診斷不同,通過傳感器進行故障檢測的故障類型較為單一,但可以通過硬件實現,并進行在線故障檢測。因此,僅在關鍵部位采用。如田乾乾等人的研究[23]中采用傳感器實時檢測電動舵機中驅動電路的故障信號,大大提高了電動舵機整體的可靠性。今后,隨著傳感器技術的不斷發展,可考慮進行多傳感器信息融合的故障診斷。
4.2 專業仿真軟件故障診斷
解析模型雖然可以反映電動舵機系統故障,但難以精確確定其內部具體器件的故障。采用實物對比驗證的方法也需要解析模型具有較高的精度。因此,利用專業仿真軟件進行故障仿真和診斷就成為電動舵機故障診斷的發展趨勢。張奎軒等人的研究中[24]就利用Protetus軟件搭建了電動舵機電路模型,并利用該仿真模型進行具體元器件的故障診斷。
4.3 健康評估
周維正[25]和吳茂興[26]將源于飛行器集成健康管理理念引入電動舵機故障診斷。將電動舵機的健康分為標稱態和非標稱態的綜合,非標稱態描述了系統實際運行的漸變和突變過程,用參數百分比或類似形式進行健康建模,可以更好地體現漸變過程,從而提供趨勢預測,進行主動維護,便于對電動舵機的工作狀態進行監護,并能提供更加準確的健康評估。
5 結論
近年來,國內關于電動舵機故障診斷技術的研究和應用成果較多。但從文獻分析可知,目前航空領域電動舵機故障診斷的應用成果主要體現在地面測試、事后確定故障類型、離線故障診斷等方面,故障診斷類型較為單一。但是,也開展了實時故障診斷、傳感器故障、健康評估、新型故障診斷方法等新型研究。未來,隨著基礎研究和新興技術的不斷發展,電動舵機的故障診斷將會取得更大的發展。
參考文獻:
[1]呂帥帥,林輝,陳曉雷,等.彈載電動舵機冪次滑模反演控制[J].北京理工大學學報,2016(10):1037-1042.
[2]付克亞.一種數字無刷電動舵機控制系統的設計[J].航空兵器,2018(4):84-88.
[3]李懷兵,徐豪榜,晉華峰,等.一種無人機用一體式電動舵機的研究[J].微電機,2017(4):17-25.
[4]靳凌,董繼鵬.考慮舵機故障的空空導彈飛行控制系統主動容錯控制[J].彈箭與制導學報,2014(6):618-621.
[5]付永領,龐堯,劉和松,等.基于故障建模的雙余度舵機故障診斷技術[J].北京航空航天大學學報,2011(11):1372-1377.
[6]呂永健,李子龍,張洪林.基于改進遺傳小波網絡的電機故障診斷研究[J].微特電機,2012(4):19-21.
[7]吳彬.基于模型的故障診斷計算及其在電動舵機上的應用[D].湘潭:湘潭大學,2008.
[8]王煒,鐘書輝.基于RBF神經網絡的無刷直流電動機故障診斷[J].微特電機,2018(5):44-47.
[9]柴永利,王煒,何衛國.一種無刷直流電動機故障診斷方法研究[J].微特電機,2018(6):49-52,61.
[10]季文韜,陳汶濱,張平.基于案例模糊的無人機故障診斷系統[J].計算機系統應用,2011(1):32-35.
[11]楊秉巖,程紹成,朱偉,等.基于傳遞函數識別的導彈電動舵機故障診斷[J].海軍航空工程學院學報,2012(5):494-498.
[12]劉昆朋,曾慶華.導彈舵機參數故障診斷方法[J].導彈與航天運載技術,2008(6):13-15.
[13]張棟,李春濤,楊藝.基于多模型參數估計的舵機故障診斷算法[J].電光與控制,2014(12):85-89,105.
[14]廖瑛,吳彬,曹登剛,等.基于自適應觀測器的導彈電動舵機故障診斷研究[J].系統仿真學報,2011(3):618-621.
[15]史賢俊,張文廣,張艷,等.PSO-RBF神經網絡在舵機系統故障診斷中的應用[J].海軍航空工程學院學報,2011(2):131-135.
[16]邱聚能,李輝.基于dSPACE的無人機電動舵機故障檢測[J].彈箭與制導學報,2017(2):123-128.
[17]王鵬,張瞿輝,金波,等.基于一元線性回歸分析的舵機故障診斷算法[J].火力與指揮控制,2009(7):20-23.
[18]李勇,曹東.基于解析模型的飛控系統執行機構的故障診斷[J].電光與控制,2016(10):104-107,111.
[19]梁瑞勝,孫有田,周希亞.小波包變換和神經網絡的某型導彈故障診斷方法研究[J].海軍航空工程學院學報,2008(2):217-220.
[20]章家保,徐偉.模糊聚類方法在電動舵機致命故障檢測中的應用[J].紅外與激光工程,2014(S1):123-129.
[21]朱紀洪,和陽,黃志毅.舵機特征模型及其故障檢測方法[J].航空學報,2015(2):640-650.
[22]李云龍,夏潔,時子房.基于半實物仿真的飛行器舵機操縱面故障檢測[J].系統仿真學報,2015(8):1914-1921.
[23]田乾乾,范海峰.新型故障監測傳感器在機載云臺電動舵機中的應用[J].傳感器與微系統,2014(9):148-151.
[24]張奎軒,曾慶華.面向故障仿真的舵機系統建模方法研究[J].航空計算技術,2015(3):618-621.
[25]周維正,李學鋒,曾慶華.基于參數辨識的電動舵機系統健康仿真和評估[J].國防科技大學學報,2016(4):132-136.
[26]吳茂興,曾慶華.基于電動舵機的健康仿真與評估方法研究[J].航空計算技術,2012(3):38-41.
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00
