工業(yè)機器人集成開發(fā)中的協(xié)議與數(shù)據(jù)開放標準化
2019-09-10 07:22:44楊舸
中國質(zhì)量與標準導報 2019年8期
楊舸






摘要:工業(yè)機器人在工業(yè)化生產(chǎn)中的應(yīng)用越來越廣泛,2016年工業(yè)和信息化部、國家發(fā)展和改革委員會、財政部聯(lián)合印發(fā)的《機器人產(chǎn)業(yè)發(fā)展規(guī)劃(2016—2020年)》中指出,雖然我國機器人產(chǎn)業(yè)已經(jīng)取得了長足進步,但與工業(yè)發(fā)達國家相比,還存在較大差距,主要表現(xiàn)在機器人產(chǎn)業(yè)鏈關(guān)鍵環(huán)節(jié)缺失,零部件中高精度減速器、伺服電機和控制器等依賴進口。目前,以國家質(zhì)量基礎(chǔ)的共性技術(shù)研究與應(yīng)用(NQI)重點專項,“智能制造基礎(chǔ)共性和關(guān)鍵技術(shù)標準研究”項目(編號:2016YFF0202000)為核心的工業(yè)機器人標準正在如火如荼地制定過程中,而我國自2013年起已經(jīng)成為全球第一大工業(yè)機器人應(yīng)用市場,主要集中在二次集成開發(fā),要想促進工業(yè)機器人本體及其關(guān)鍵零部件的國產(chǎn)化,提升二次集成開發(fā)的應(yīng)用價值,很重要的一個方向是能通過協(xié)議以及數(shù)據(jù)開放的標準化達到各子系統(tǒng)或零部件之間的互聯(lián)互通、互換及柔性控制。
關(guān)鍵詞:工業(yè)機器人 集成開發(fā) 協(xié)議 數(shù)據(jù)開放 標準化 互聯(lián)互通 互換 柔性控制
Protocol and Data Opening Standardization in Integration and Development of Industrial robots
Yang Ge (Shenzhen Institute of Standards and Technology)
Abstract: Industrial robots are used in industrial production more and more extensive, “Industry Development Planning of Robots (2016—2020)” released by ministries and commissions such as the MIIT, etc. indicated that, although robots industry has made great progress in China, but there is still a big gap from developed countries, it is expressed in missing key industry chain, high precision reducer, servo motor and controller are relying on import. At present, according to the “research on basic commonness and key technical standards of intelligent manufacturing” NQI major project (project NO. 2016YFF0202000), many industrial robots standardization will be released soon. Since 2013, it has become the largest industrial robot application market on secondary integration and development, to improving the status and nationalization of industrial robots and its key component, application value of secondary integration development, it is an important direction for achieving interconnection, interchangeability and flexible control between subsystems or components through protocol and data opening standardization.
Key words:? industrial robots, integration and development, protocol, data opening, standardization, interconnection, interchangeability, flexible control
1 工業(yè)機器人的定義及結(jié)構(gòu)組成
在現(xiàn)行國家標準GB/T 12643—2013《機器人與機器人裝備 詞匯》中對工業(yè)機器人的定義是:“自動控制的、可重復編程、多用途的操作機,可對三個或三個以上軸進行編程。它可以是固定式或移動式。在工業(yè)自動化中使用”。此定義也與國際標準ISO 8373中的定義保持一致。不同組織對工業(yè)機器人也有自己的定義,例如美國機器人工業(yè)協(xié)會(RIA)對工業(yè)機器人的定義為:“工業(yè)機器人是用來進行搬運材料、零件、工具等可再編程的多功能機械手,或通過不同程序的調(diào)用來完成各種工作任務(wù)的特種裝置”。可見,從結(jié)構(gòu)操作或應(yīng)用等不同角度來定義其描述不盡相同。但通俗一點理解,工業(yè)機器人是面向工業(yè)自動化場景下的多關(guān)節(jié)機械手或多自由度的機器裝置,它能自動執(zhí)行工作,可編程,靠自身動力和控制能力來實現(xiàn)各種功能,通常裝有刀具或其他輔助加工工具,能夠搬運材料、工件,完成各種工序操作。
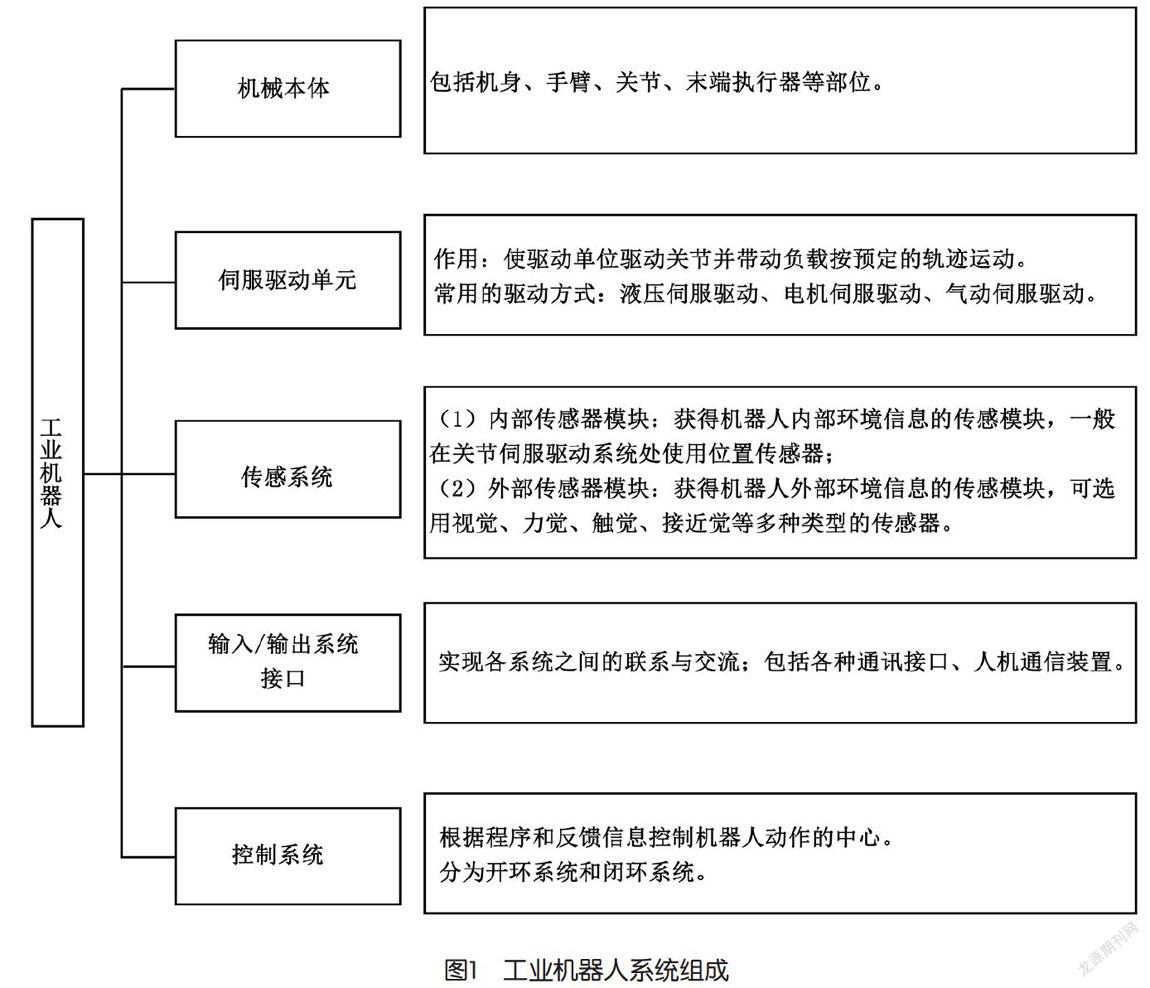
工業(yè)機器人的組成分硬件和軟件兩部分,按功能一般分為下列五個部分:機械本體、伺服驅(qū)動單元、傳感系統(tǒng)、輸入/輸出系統(tǒng)接口和控制系統(tǒng)。各個系統(tǒng)的作用見圖1所示。
2 工業(yè)機器人產(chǎn)業(yè)發(fā)展概況
當前,全球機器人市場規(guī)模持續(xù)擴大,據(jù)國際機器人聯(lián)盟(IFR)數(shù)據(jù)顯示,2018年全球機器人市場規(guī)模接近300億美元,2013~2018年平均增長率約15.1%。工業(yè)機器人168.2億美元,服務(wù)機器人92.5億美元,特種機器人37.5億美元。2018年,我國機器人市場規(guī)模預(yù)計達到87.4億美元,2013~2018年平均增長率接近30%,工業(yè)機器人62.3億美元,是全球第一大工業(yè)機器人應(yīng)用市場。工業(yè)機器人產(chǎn)業(yè)可細分為三個主要的子產(chǎn)業(yè),包括關(guān)鍵零部件產(chǎn)業(yè)、工業(yè)機器人本體產(chǎn)業(yè)、系統(tǒng)集成產(chǎn)業(yè)。
2.1 關(guān)鍵零部件
工業(yè)機器人產(chǎn)業(yè)的發(fā)展為其核心零部件的發(fā)展和應(yīng)用創(chuàng)造了眾多機會。工業(yè)機器人除本體以外,主要有三大核心零部件,包括控制器、伺服系統(tǒng)、減速器,它們占到工業(yè)機器人成本的70%左右。而隨著人工智能浪潮的愈演愈烈,機器視覺系統(tǒng)也成了工業(yè)機器人不可或缺的一部分。
控制器是機器人的大腦,發(fā)布和傳遞動作指令。它包括硬件和軟件兩部分,硬件就是工業(yè)控制板卡,軟件部分主要是控制算法、二次開發(fā)等。目前,國外主流機器人廠商的控制器均為在通用的多軸運動控制器平臺基礎(chǔ)上進行自主研發(fā),各品牌機器人均有自己的控制系統(tǒng)與之匹配,國內(nèi)企業(yè)控制器尚未形成市場競爭優(yōu)勢。現(xiàn)有的工業(yè)機器人控制器封閉構(gòu)造,帶來開放性差、軟件獨立性差、容錯性差、擴展性差、缺乏網(wǎng)絡(luò)功能等缺點,已不能適應(yīng)智能化和柔性化要求。開發(fā)標準化、開放化控制器是工業(yè)機器人的一個發(fā)展方向,存在巨大發(fā)展空間。
伺服系統(tǒng)是工業(yè)機器人的關(guān)節(jié),是工業(yè)自動化的重要組成部分,是自動化行業(yè)中實現(xiàn)精確定位、精準運動的必要途徑,在機床工具、紡織機械和包裝機械等領(lǐng)域得到廣泛應(yīng)用。機器人的關(guān)節(jié)驅(qū)動離不開伺服系統(tǒng)。關(guān)節(jié)越多,機器人的柔性和精準度越高,所需要使用的伺服電機數(shù)量就越多。工業(yè)機器人市場的快速增長必然帶動伺服系統(tǒng)的市場規(guī)模不斷上升。
減速器是工業(yè)機器人的神經(jīng)。減速器指的是連接動力源和執(zhí)行機構(gòu)之間的中間裝置,通常它把電動機、內(nèi)燃機等高速運轉(zhuǎn)的動力通過輸入軸上的小齒輪帶動輸出軸上的大齒輪來達到減速的目的,并傳遞更大的轉(zhuǎn)矩。大量應(yīng)用在工業(yè)機器人上的減速器主要有RV減速器和諧波減速器。近年來,隨著我國工業(yè)機器人應(yīng)用市場的快速發(fā)展,工業(yè)機器人用減速器市場的需求規(guī)模也隨之增長。
雖然減速器、伺服系統(tǒng)在工業(yè)機器人成本中所占比重較大,但國內(nèi)減速器、伺服系統(tǒng)等關(guān)鍵零部件發(fā)展相對滯后,技術(shù)水平較低,產(chǎn)品穩(wěn)定性差,與國外產(chǎn)品相比存在不少差距,導致國內(nèi)工業(yè)機器人減速器、伺服系統(tǒng)等零部件主要依賴進口,國內(nèi)企業(yè)工業(yè)機器人生產(chǎn)成本較高,競爭力較弱。
2.2 工業(yè)機器人本體
工業(yè)機器人的本體是指其機體結(jié)構(gòu)和機械傳動系統(tǒng),也是工業(yè)機器人的支承基礎(chǔ)和執(zhí)行機構(gòu),主要包括傳動部件、機身及行走機構(gòu)、臂部、腕部和手部五個部分。本體是工業(yè)機器人的重要部分,所有的計算、分析和編程最終要通過本體的運動和動作完成特定的任務(wù)。工業(yè)機器人本體是系統(tǒng)集成及應(yīng)用的中心,其性能決定了系統(tǒng)集成及應(yīng)用技術(shù)的水平。
從產(chǎn)業(yè)鏈的角度看,工業(yè)機器人本體是機器人產(chǎn)業(yè)發(fā)展的基礎(chǔ)。盡管在國家政策的大力推動下,國產(chǎn)工業(yè)機器人廠商規(guī)模不斷擴大,但其核心零部件的缺失導致企業(yè)生產(chǎn)成本高企,企業(yè)的盈利能力不容樂觀。此外,為應(yīng)對新崛起的國產(chǎn)品牌,外資廠商紛紛采取降價的手段削弱國產(chǎn)工業(yè)機器人的市場競爭力。這些因素使得工業(yè)機器人本體產(chǎn)品的市場規(guī)模遠遠不如系統(tǒng)集成。
2.3 系統(tǒng)集成
工業(yè)機器人的系統(tǒng)集成包括計算機軟件、硬件、操作系統(tǒng)技術(shù)、數(shù)據(jù)庫技術(shù)、網(wǎng)絡(luò)通信技術(shù)等的集成,以及不同廠家產(chǎn)品選型、搭配的集成。系統(tǒng)集成所要達到的目標是整體性能最優(yōu),即所有部件集成后相互協(xié)作,形成一個性能勻稱、可擴充、可維護的全系統(tǒng)。工業(yè)機器人系統(tǒng)集成及應(yīng)用技術(shù)是工業(yè)機器人商業(yè)化和大規(guī)模普及的關(guān)鍵。
2.3.1 工業(yè)機器人集成產(chǎn)業(yè)應(yīng)用方向
工業(yè)機器人本體是系統(tǒng)集成的中心,必須與行業(yè)應(yīng)用相結(jié)合。系統(tǒng)集成是對工業(yè)機器人本體的二次開發(fā),本體的性能決定了系統(tǒng)集成的水平。國際品牌更清楚怎樣去做整合來充分發(fā)揮功能達到客戶的需求,所以系統(tǒng)集成還是以國際品牌為核心,市場大小也是按汽車、3C電子、金屬加工、物流等技術(shù)要求高、自動化程度高的行業(yè)向技術(shù)要求較低、自動化程度較低的行業(yè)排列。
工業(yè)機器人下游最終用戶可以按行業(yè)分為汽車工業(yè)行業(yè)和一般工業(yè)行業(yè)。汽車行業(yè)自動化程度已經(jīng)比較高。大部分外資整車廠商的生產(chǎn)線標準及工業(yè)機器人選型是全球統(tǒng)一的,國產(chǎn)機器人難有機會。而在目前國產(chǎn)工業(yè)機器人技術(shù)尚未完全成熟的情況下,國產(chǎn)整車廠也不敢貿(mào)然使用國產(chǎn)工業(yè)機器人完成重要工位的自動化操作。汽車是技術(shù)密集型產(chǎn)業(yè),整車廠在長期使用工業(yè)機器人的過程中也形成了自己的規(guī)則和標準。技術(shù)要求高且要契合車廠特有的標準,對系統(tǒng)集成商來說,構(gòu)成了較高的準入門檻。多數(shù)國內(nèi)集成商主要還是做一些分包或者不太重要的項目,少數(shù)已經(jīng)入圍的系統(tǒng)集成商獲得了先發(fā)優(yōu)勢。一般工業(yè)中按行業(yè)分類又可以分為食品飲料、石化、金屬加工、醫(yī)藥、3C、塑料、白家電、煙草等,按應(yīng)用分為焊接、機床上下料、物料搬運碼垛、打磨、噴涂、裝配等,工業(yè)機器人的應(yīng)用除了重復精度高、工作效率高等特點外,還能使工人從惡劣的工作環(huán)境中解放出來,具有較大的社會效益。
2.3.2 工業(yè)機器人集成產(chǎn)業(yè)規(guī)模
在工業(yè)機器人領(lǐng)域,我國企業(yè)目前主要的競爭優(yōu)勢在系統(tǒng)集成方面,80%的工業(yè)機器人企業(yè)都集中在該領(lǐng)域。隨著系統(tǒng)集成商圍繞工業(yè)機器人做整線集成,相關(guān)的專用設(shè)備和電氣原件等的價格逐年下調(diào),國內(nèi)企業(yè)憑著性價比和服務(wù)優(yōu)勢逐漸替代進口,市場份額穩(wěn)步上升,現(xiàn)已占據(jù)了半壁江山。工業(yè)機器人和系統(tǒng)集成是我國工業(yè)自動化發(fā)展方向,為推動制造業(yè)升級,實現(xiàn)自動化、智能化,國家高度重視工業(yè)機器人產(chǎn)業(yè)發(fā)展,從研發(fā)、采購、應(yīng)用推廣等多方面提供政策資金支持;集成系統(tǒng)的研發(fā),是工業(yè)機器人產(chǎn)業(yè)鏈上利潤最高也是技術(shù)門檻最高的環(huán)節(jié)。近年來,隨著工業(yè)機器人產(chǎn)業(yè)的蓬勃發(fā)展,系統(tǒng)集成應(yīng)用也逐年升溫,備受追捧。集成系統(tǒng)以零配件和工業(yè)機器人為基礎(chǔ),是未來企業(yè)提高生產(chǎn)效率、增加市場競爭力的主要方式之一。一般情況下,系統(tǒng)集成市場規(guī)模可達機器人本體市場規(guī)模的三倍。根據(jù)中投顧問產(chǎn)業(yè)研究中心預(yù)測,2020年工業(yè)機器人本體市場規(guī)模可達276億元人民幣左右,集成系統(tǒng)市場規(guī)模則有望接近830億元人民幣,未來五年年均增速可達20%。
綜上,“伺服系統(tǒng)”“控制器”“核心算法”“精密減速器”以及“應(yīng)用和集成技術(shù)”這五大核心技術(shù)被譽為工業(yè)機器人本體的“成功五要素”。國產(chǎn)工業(yè)機器人本體產(chǎn)業(yè)要實現(xiàn)快速發(fā)展,在這五大領(lǐng)域中至少要在兩到三個方面積累競爭優(yōu)勢。首先需在伺服系統(tǒng)和控制器兩方面穩(wěn)固根基,其次在核心算法方面要有所突破。國內(nèi)工業(yè)機器人本體企業(yè)突破關(guān)鍵零部件有兩種思路:一是走關(guān)鍵零部件自主研發(fā)路線;二是走深度合作路線,打通工業(yè)機器人產(chǎn)業(yè)上下游。工業(yè)機器人本體是自動化技術(shù)集大成者,在機器人產(chǎn)業(yè)鏈上議價能力最強,可以有效整合上游零部件企業(yè)和下游系統(tǒng)集成商。
3 工業(yè)機器人視覺集成系統(tǒng)協(xié)議標準化
3.1 概述
在我國工業(yè)機器人系統(tǒng)集成產(chǎn)業(yè)蓬勃發(fā)展的同時,也面臨著諸多技術(shù)問題。以工業(yè)機器人與視覺單元集成為例,作為工業(yè)機器人的“大腦中樞神經(jīng)”,人工智能在過去的幾年里一直處于持續(xù)的高速發(fā)展階段,很多工業(yè)機器人也已經(jīng)具備了相當高的智能化特點,但是還遠遠達不到人類所設(shè)想的智能化程度。工業(yè)自動化的真正實現(xiàn),需要高度智能化的工業(yè)機器人去替代人類的一部分工作,而想讓工業(yè)機器人能很好地替代人類工作的話,首先要做的就是讓它們能“看”得到,當工業(yè)機器人具備觀察事情的能力時,才能夠很好地對事情判斷,從而做到智能化、靈活、自主地解決問題,而且在工業(yè)4.0的趨勢下,智能制造對工業(yè)機器人的要求也越來越高,傳統(tǒng)的通過編程來執(zhí)行某一特定動作的工業(yè)機器人,將不再能滿足制造業(yè)向前發(fā)展的需求。
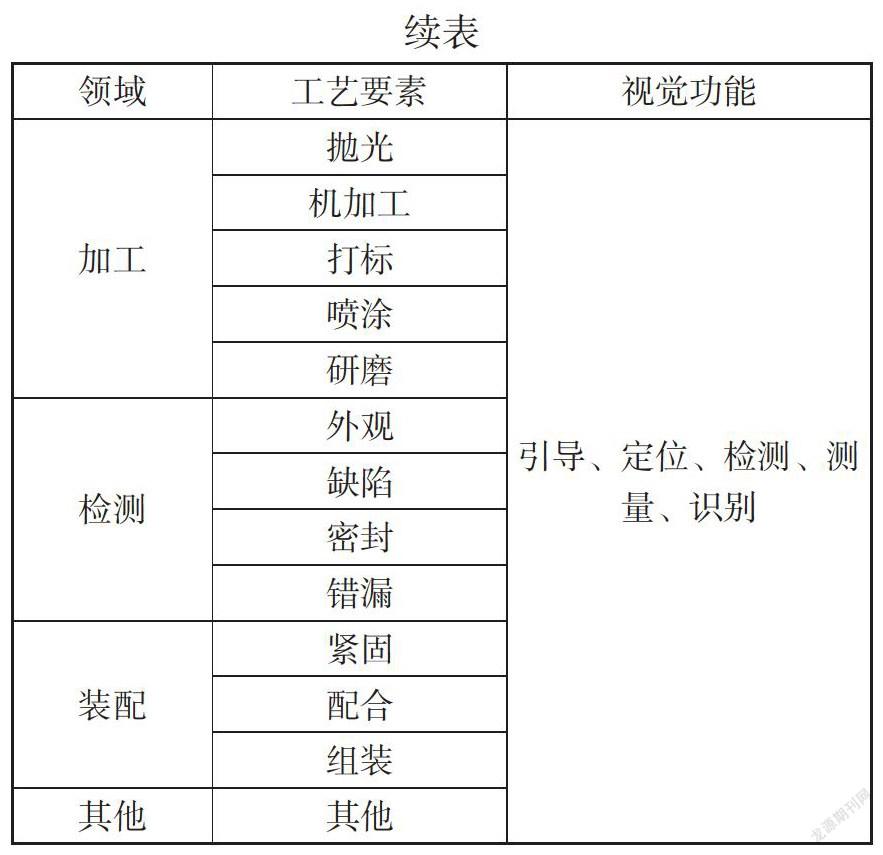
要工業(yè)機器人能“看”到,需要給工業(yè)機器人裝上一雙“慧眼”,以目前的主流技術(shù)來說,就是將工業(yè)機器人與視覺單元進行集成,形成工業(yè)機器人視覺集成系統(tǒng),常應(yīng)用于搬運、加工、檢測及裝配幾大領(lǐng)域,各領(lǐng)域又分為多個工藝,在工業(yè)化大生產(chǎn)中的引導、定位、檢測、測量、識別等多場景下進行應(yīng)用。視覺單元是工業(yè)機器人的眼睛。工業(yè)自動化的實現(xiàn)需要高度智能化的工業(yè)機器人代替人類的一部分工作;而顯然,如果想讓機器人很好地替代人類工作,首先要確保它們能“看”得到,這就依賴于機器視覺系統(tǒng)來完成。機器視覺系統(tǒng)可以通過機器視覺產(chǎn)品即圖像攝取裝置,將被攝取目標轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),得到被攝目標的形態(tài)信息,根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字信號,然后圖像系統(tǒng)對這些信號進行各種運算來抽取目標的特征,進而根據(jù)判別的結(jié)果來控制現(xiàn)場的設(shè)備動作。具體工藝要素及視覺功能如表1所示。
工業(yè)機器人與視覺單元的集成,除了各自滿足產(chǎn)品所需要達到的安全、質(zhì)量、可靠性等技術(shù)要求之外,還需要涉及多種技術(shù)的融合,例如裝配技術(shù)、坐標系標定技術(shù)、通信協(xié)議適配技術(shù)等。工業(yè)機器人視覺集成系統(tǒng)的應(yīng)用最基礎(chǔ)需要實現(xiàn)的,就是不同品牌或種類的工業(yè)機器人與不同品牌或種類的視覺單元能夠互聯(lián)互通,只有實現(xiàn)了互聯(lián)聯(lián)通后,才有可能在不同應(yīng)用場景下完成各種定制功能的集成開發(fā)。而實現(xiàn)不同工業(yè)機器人與視覺單元的互聯(lián)互通所需滿足的除了硬件物理接口的適配要求之外,通信協(xié)議的適配是不可或缺的重要手段之一。通信協(xié)議是指多方實體完成數(shù)據(jù)和信息交互或服務(wù)所必須遵循的規(guī)則和約定。通過通信信道互連起來的多個產(chǎn)品或設(shè)備,要使其能協(xié)同工作實現(xiàn)信息交換和資源共享,它們之間必須具有共同的語言。交流什么、怎樣交流及何時交流,必須遵循某種互相能夠接受的規(guī)則。
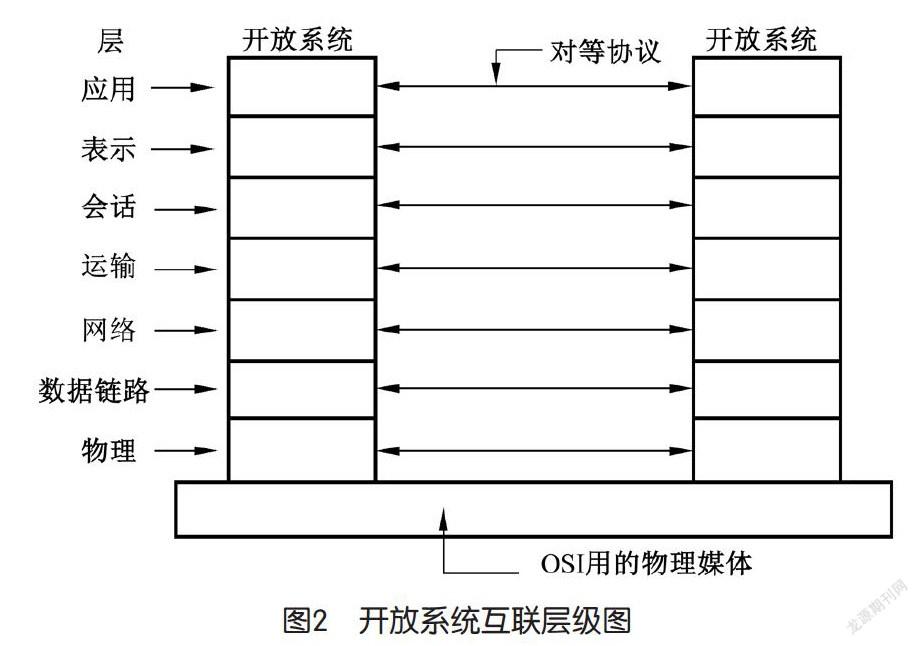
開放系統(tǒng)互連參考模型 (Open System Interconnect ,OSI)是國際標準化組織(ISO)和國際電報電話咨詢委員會(CCITT)聯(lián)合制定的開放系統(tǒng)互連參考模型,根據(jù)GB/T 9387.1—1998《信息技術(shù) 開放系統(tǒng)互連 基本參考模型 第1部分:基本模型》(等同采用ISO/IEC 7498-1:1994)中的定義,為開放式互連信息系統(tǒng)提供了一種功能結(jié)構(gòu)的框架,從低到高分別是:物理層、數(shù)據(jù)鏈路層、網(wǎng)絡(luò)層、運輸層、會話層、表示層和應(yīng)用層,層級結(jié)構(gòu)詳見圖2。通常來說,物理層、數(shù)據(jù)鏈路層、網(wǎng)絡(luò)層、運輸層面向通信,而會話層、表示層及應(yīng)用層是面向信息處理。
要實現(xiàn)不同廠家工業(yè)機器人與不同廠家視覺單元的互聯(lián)互通需求,制定一套工業(yè)機器人與視覺單元廠家之間可以互相理解的“通用協(xié)議語言”至關(guān)重要。通過對多家工業(yè)機器人與視覺單元廠家調(diào)研發(fā)現(xiàn),底層的通信協(xié)議部分,例如數(shù)據(jù)鏈路層以及運輸層,各家均會根據(jù)不同應(yīng)用場景采用不同的通用通信協(xié)議支持,工業(yè)機器人與視覺單元集成常用的通用通信協(xié)議、應(yīng)符合的標準、適用的網(wǎng)絡(luò)架構(gòu)層次以及應(yīng)用方式如表2所示。
對于面向通信的通用協(xié)議,均已標準化,且應(yīng)用較成熟,除必要的再開發(fā)外,集成開發(fā)企業(yè)一般不會去更改現(xiàn)有的標準化協(xié)議,集成開發(fā)主要針對面向信息處理的互聯(lián)層級進行,而且越面向高層級進行協(xié)議的定制開發(fā),不同產(chǎn)品及設(shè)備廠家之間能達成一致的意愿和程度越強,因為需要開發(fā)的內(nèi)容少,流程相對簡化。
3.2 系統(tǒng)組成
工業(yè)機器人視覺集成系統(tǒng)可以抽象成由主控單元、工業(yè)機器人和視覺單元集成為一個軟硬件平臺,主控單元進行流程總控,工業(yè)機器人負責運動控制,視覺單元負責視覺信息處理。主控單元根據(jù)應(yīng)用的實際情況主要有如圖3所示兩種形式:
1)主控單元、工業(yè)機器人和視覺單元相對獨立,工業(yè)機器人和視覺單元分別與主控單元進行交互,如圖3(a)所示;
2)工業(yè)機器人同時作為主控單元,與視覺單元進行交互,如圖3(b)所示。
3.3 協(xié)議標準化
工業(yè)機器人視覺集成系統(tǒng)協(xié)議僅對應(yīng)用層進行定義,對其他層級不做定義,通過對應(yīng)用層報文格式,包括幀結(jié)構(gòu)以及部件數(shù)據(jù)編碼的定義,實現(xiàn)工業(yè)機器人和視覺單元的集成與互聯(lián)互通。
在幀結(jié)構(gòu)定義中,可以明確幀的字節(jié)長度、傳輸順序,同時給出如表3所示的幀結(jié)構(gòu)應(yīng)用表,并在表中對字段名、字段長度以及定義進行詳細的說明。
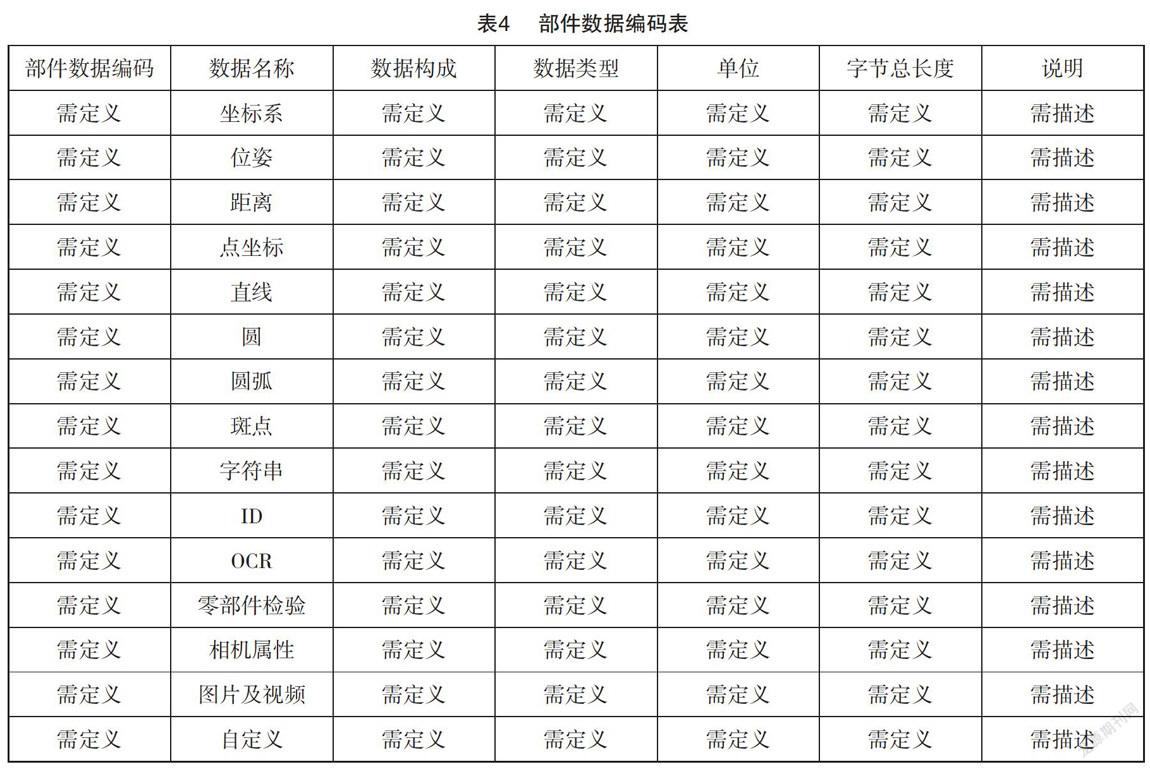
在部件數(shù)據(jù)編碼定義中,可對表4所示的部件數(shù)據(jù)編碼所占的字節(jié)位、數(shù)據(jù)名稱、數(shù)據(jù)構(gòu)成、數(shù)據(jù)類型、單位、字節(jié)總長度進行定義以及必要的說明。
對于視頻流的傳輸協(xié)議,可以根據(jù)傳輸介質(zhì)的不同,選擇支持不同的傳輸協(xié)議,例如網(wǎng)線傳輸可采用GigE Vision協(xié)議,USB傳輸可采用USB3 Vision協(xié)議。
4 工業(yè)機器人數(shù)據(jù)開放標準化
4.1 概述
以工業(yè)機器人柔性控制技術(shù)應(yīng)用為例,目前工業(yè)機器人多以“剛性”的角色出現(xiàn)在工業(yè)化制造現(xiàn)場,按照已編制好的程序,或視教方式進行運動控制。在智能制造、人工智能大背景的驅(qū)動下,未來工業(yè)機器人將朝著智能化、柔性化的方向發(fā)展。工業(yè)機器人柔性化之后,將具有更好的環(huán)境適應(yīng)性、安全性、人機交互能力。柔性化的發(fā)展方向一種是制造材料的柔性化,例如外殼,一種是通過對關(guān)節(jié)等零部件的驅(qū)動實現(xiàn)。對于材料的柔性化,只能是部分結(jié)構(gòu)材料在滿足安全性的前提下選用柔性材料替代現(xiàn)在的金屬或其他材料,而對于工業(yè)機器人內(nèi)的控制器、伺服裝置、減速機、其他輔助材料等比較難完全用柔性材料替代,這時候更多的是需要通過柔性控制技術(shù)來達到對工業(yè)機器人的柔性化實現(xiàn),例如工業(yè)機器人和視覺的集成應(yīng)用,增強機器人的“感知”能力,還可以通過對工業(yè)機器人驅(qū)動總線反饋的狀態(tài)數(shù)據(jù)和外部傳感器采集的傳感數(shù)據(jù),實時調(diào)整其運動規(guī)劃進行點位控制或者連續(xù)路徑控制的方式。
4.2 柔性控制技術(shù)及其實現(xiàn)
傳統(tǒng)的工業(yè)機器人控制技術(shù)主要體現(xiàn)為,按照預(yù)先示教的點位和預(yù)先編好的程序?qū)崿F(xiàn)指定路徑的運動任務(wù)。而柔性控制技術(shù)是指工業(yè)機器人在實現(xiàn)傳統(tǒng)運動控制任務(wù)的同時,通過感應(yīng)外部環(huán)境實時調(diào)整運動軌跡以達到完成特定任務(wù)的控制方式,例如,拖動示教、交互示教、遙操作示教、碰撞檢測、視覺引導等應(yīng)用場景。
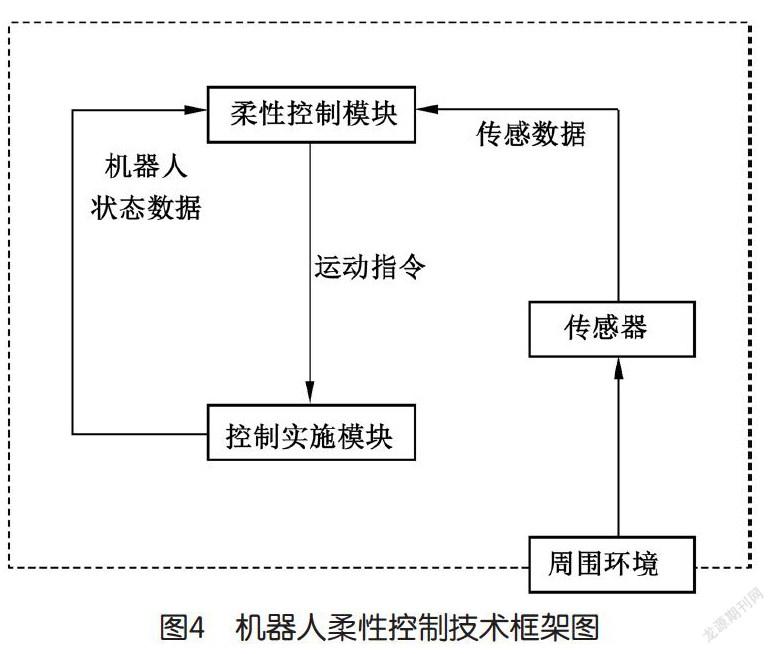
如圖4所示,為柔性控制技術(shù)的基本實現(xiàn)框架圖,主要通過柔性控制模塊來實時調(diào)整工業(yè)機器人的運動軌跡。其中,工業(yè)機器人狀態(tài)數(shù)據(jù)是指驅(qū)動總線反饋的電機位置、電機速度、電機力矩等數(shù)據(jù),傳感數(shù)據(jù)是指通過外部傳感器采集的部分環(huán)境數(shù)據(jù),比如力矩、圖像、電壓、電流等。
柔性控制模塊的核心是實現(xiàn)柔性控制算法,例如信號處理算法、工業(yè)機器人動力學算法、圖像檢測與識別算法等。這些算法都需要一定的數(shù)據(jù)支撐,即前述的工業(yè)機器人狀態(tài)數(shù)據(jù)和環(huán)境傳感數(shù)據(jù);同時也需要添加一些其他的輔助功能,比如DI/DO、文件讀寫、停止報錯等。如圖5所示為工業(yè)機器人柔性控制模塊的基本實現(xiàn)方法,所需數(shù)據(jù)和輔助功能通過相應(yīng)的接口與柔性控制算法進行交互,運動指令的下發(fā)既可以直接調(diào)用運動函數(shù),也可以進行軌跡插補后給出具體的指令數(shù)據(jù)。
4.3 軟件系統(tǒng)數(shù)據(jù)開放的標準化
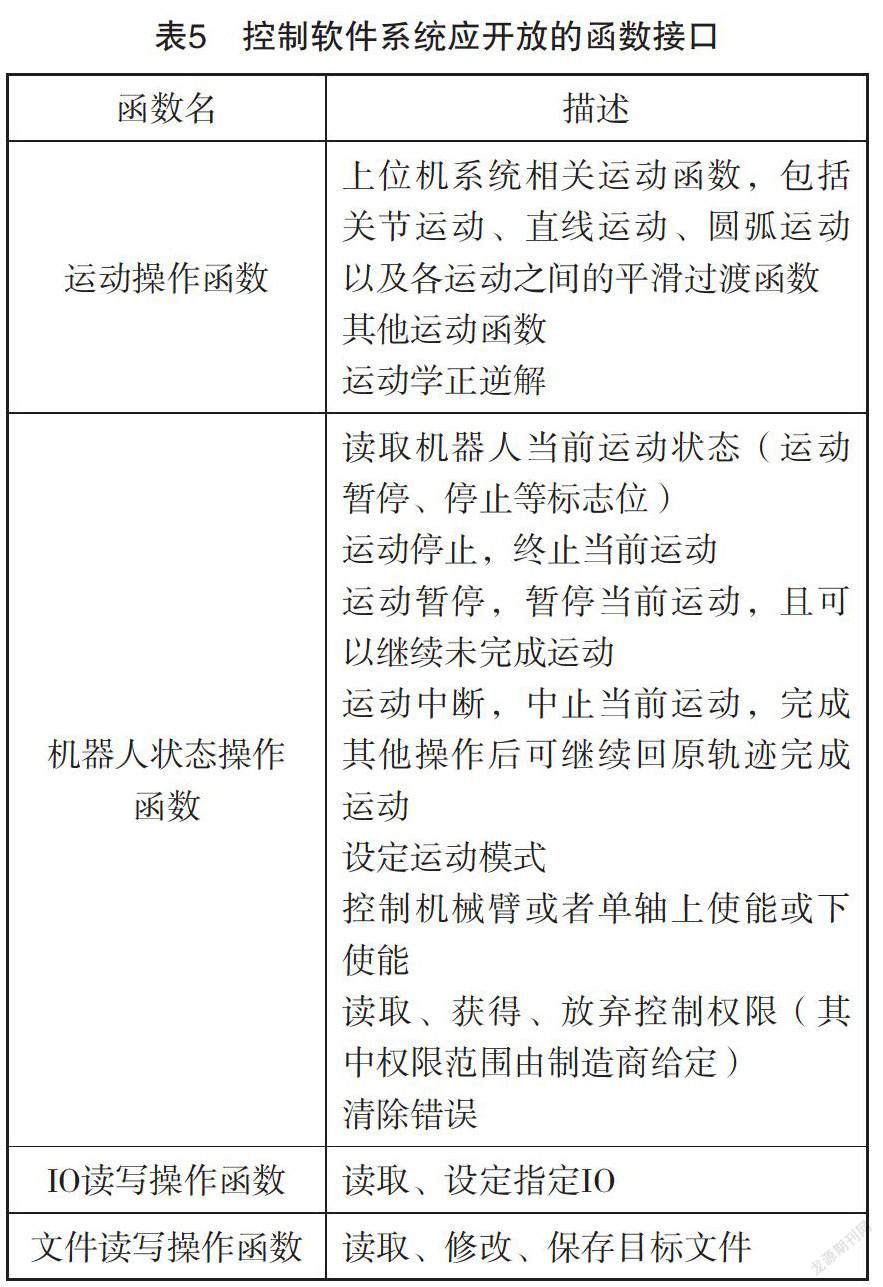
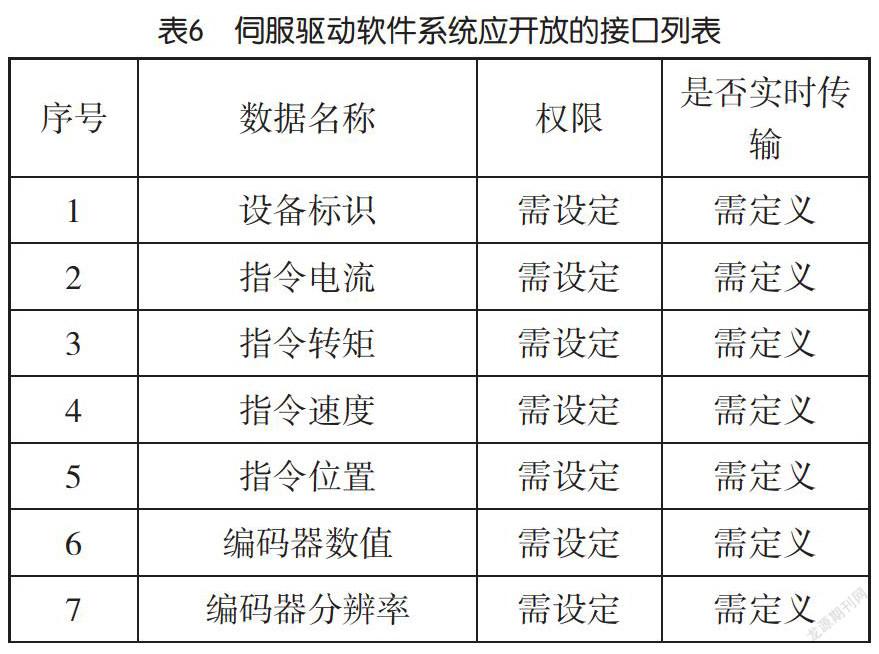
為實現(xiàn)對工業(yè)機器人的柔性控制,軟件系統(tǒng)不僅要具有獨立運行的控制軟件系統(tǒng)和伺服驅(qū)動軟件系統(tǒng),而且要開放相應(yīng)的數(shù)據(jù)接口以供柔性控制模塊的二次開發(fā)調(diào)用,其中控制軟件系統(tǒng)需要開放的函數(shù)接口如表5所示。
伺服驅(qū)動軟件系統(tǒng)應(yīng)具備可擴展性,以便于用戶進行柔性擴展相關(guān)的開發(fā)。因此,伺服驅(qū)動軟件系統(tǒng)應(yīng)開放如表6所示的數(shù)據(jù)傳輸接口,考慮到工業(yè)機器人的安全性,需要對操作權(quán)限(可讀/可寫)以及傳輸?shù)膶崟r性進行定義。
5 協(xié)議及數(shù)據(jù)開放標準化助力產(chǎn)業(yè)發(fā)展
目前,開展工業(yè)機器人二次集成開發(fā)應(yīng)用的企業(yè)所面臨的問題就是所需集成的部件由不同廠家提供,在集成過程中,需要根據(jù)不同部件產(chǎn)品的軟件進行復雜的二次開發(fā),才能與工業(yè)機器人進行通信互聯(lián),同時在應(yīng)用過程中,如果需要更換部件產(chǎn)品,則又需要重新進行開發(fā),無形中增加了人力、時間成本,降低了集成應(yīng)用效率。如果能在應(yīng)用層等互聯(lián)層建立標準化的通用通信協(xié)議,則在滿足硬件機械接口的前提下,可以實時進行集成部件的互換及通信互聯(lián),降低應(yīng)用過程中的人力及時間成本,大幅提高集成應(yīng)用的效率及效益。
我國工業(yè)機器人的本體市場一直由多個國外品牌所主導,企業(yè)在做二次集成開發(fā)時無法獲得所需要的工業(yè)機器人本體數(shù)據(jù)參數(shù)、接口函數(shù)等信息,導致在運動控制精度、安全特性、功能實現(xiàn)等方面的應(yīng)用、擴展、維護時間和成本代價高昂,而我國的二次集成開發(fā)市場巨大,在這種情況下,如果能夠通過對工業(yè)機器人柔性控制所需采集數(shù)據(jù)信息的確定,建立數(shù)據(jù)開放、控制軟件系統(tǒng)接口函數(shù)開放、伺服驅(qū)動軟件系統(tǒng)接口開放的規(guī)則,符合規(guī)則要求的工業(yè)機器人才能在未來定義為符合“柔性控制技術(shù)”特性,從而在“柔性控制”特性應(yīng)用場景下更快更好地推動集成開發(fā)應(yīng)用,突破長久以來國外工業(yè)機器人品牌對我國市場的主導局面。
由此可見,未來如果能更多地通過協(xié)議的標準化促進集成開發(fā)應(yīng)用中的互聯(lián)互通,更多地通過數(shù)據(jù)開放的標準化獲取工業(yè)機器人特性信息,我國工業(yè)機器人和集成開發(fā)產(chǎn)業(yè)才能夠逐步擺脫受限于人的狀況,搶占國內(nèi)外市場以及全球工業(yè)機器人和集成開發(fā)產(chǎn)業(yè)價值鏈的更高端。
參考文獻
[1] 全國自動化系統(tǒng)與集成標準化技術(shù)委員會. 機器人與機器? ? ?人裝備 詞匯:GB/T 12643—2013[S].北京:中國標準? ? 出版社, 2013.
[2] 電子工業(yè)部標準化研究所. 信息技術(shù) 開放系統(tǒng)互連 基 本參考模型:第1部分 基本模型:GB/T 9387.1—1998? ? ?[S]. 北京:中國標準出版社, 1998.
