基于無人駕駛的車載激光雷達及人眼安全思考
2019-09-10 07:22:44高端勤睿
大眾汽車·學術版 2019年8期
高端勤睿
摘 要 隨著汽車行業的不斷發展和人民生活水平的提高,全國汽車保有量日漸增加。統計顯示,截至2019年底,小型載客汽車保有量達2.2億輛。汽車保有量的迅速增加帶來了日趨嚴重的交通擁堵和安全問題。與此同時,無人駕駛技術進入了人們的視野。目前這項技術還在發展階段,而實現無人駕駛最重要的一環就是實現精準快速的測距,車載激光雷達是目前最好的選擇。當前車載激光雷達主流的測距方法有兩種:激光飛行時間測距(TOF)和相位式測距(QPD)。但現在面臨的一個重要問題是,為了實現更高的精度就需要發射功率足夠高的激光,這樣的激光可能對人眼造成傷害。如何在保證人眼安全的前提下實現精準快速的測距是一個關鍵問題,本文主要探究了這兩種測距方法,并且在人眼安全方面進行了分析和思考。
關鍵詞 無人駕駛;激光雷達;人眼安全
引言
隨著計算機性能的不斷提高和激光測距技術的發展,無人駕駛技術已經不再是科幻片中遙不可及的夢想,它已經走進了我們的生活。例如谷歌公司研發的全自動駕駛汽車Google Driverless Car,通過照相機、雷達感應器和激光測距機來監測交通狀況,使用詳細
地圖導航,不需要駕駛者就可以實現啟動、行駛和停止。該項目目前正在測試,已駕駛了48萬公里。雖然無人駕駛會給我們帶來很多便利,但一項新技術能否真正應用到社會,還要考慮它是否足夠安全可靠。無人駕駛技術實現極為關鍵的一環是精準測距,通過測距來監測交通狀況,從而使無人駕駛車輛迅速有效地做出反應。眾所周知激光功率越大,相應的測距精度也會越高。但是強度較大的激光也會對人的眼睛造成傷害,在保證人眼安全的前提下如何保證精度就成為了一項十分有意義的課題。
1 兩種測距方法的模型和原理
激光測距的基本原理和超聲波等測距方法相同,都是通過測量發射脈沖和接收到的回波脈沖之間的時間差來進行測距。目前的測距方法中最被看好的就是激光測距,因為激光準直性好,強度高,速度快,受極端天氣的影響較小,目前主流的車載激光測距方法有兩種:飛行時間測距(TOF)、相位式測距(QPD)。
2 飛行時間測距(TOF)模型和原理
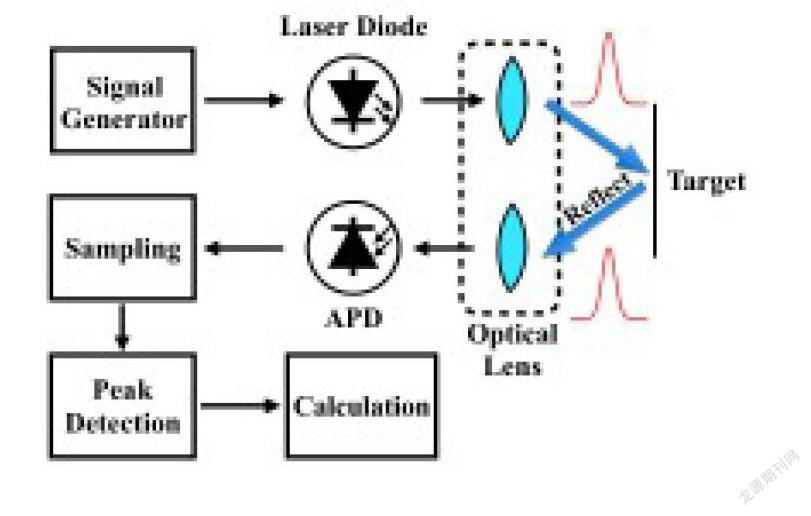
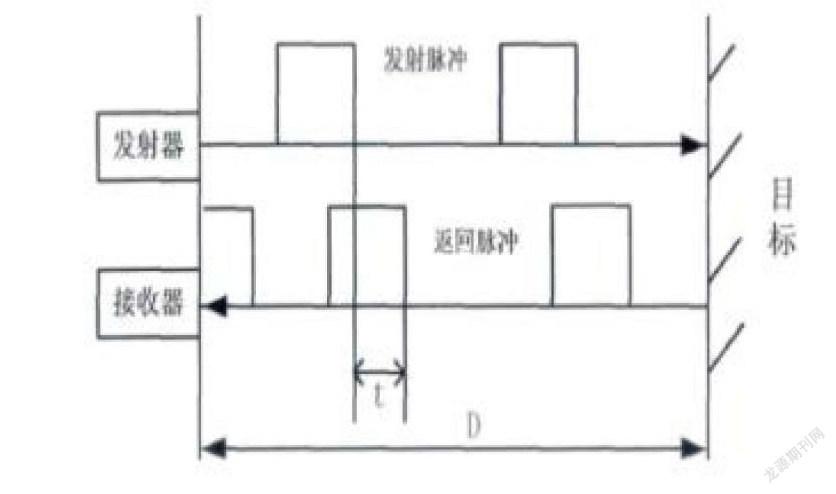
飛行時間測距方法的原理是:由計算機控制激光器(laser)產生一個高斯型脈沖發射出去,發射出去的激光碰到障礙物會被反射回來,然后光電轉換器(APD)接收到反射回來的回波脈沖,計算機對信號進行采樣分析,計算出從發出脈沖到收到回波脈沖所用的時間 t, 從而計算出激光器到障礙物的距離。原理圖如下:
可以根據發射信號和接收信號計算出相應的時間差 t,計算出激光器到障礙物的距離 d:
d = c*t / 2 (c 為激光的速度)
(障礙物離激光器的距離一般來說不能超過 max = c*T/2,否則無法將回波脈沖與發射激光脈沖一一對應。)
3 相位式測距(QPD)方法
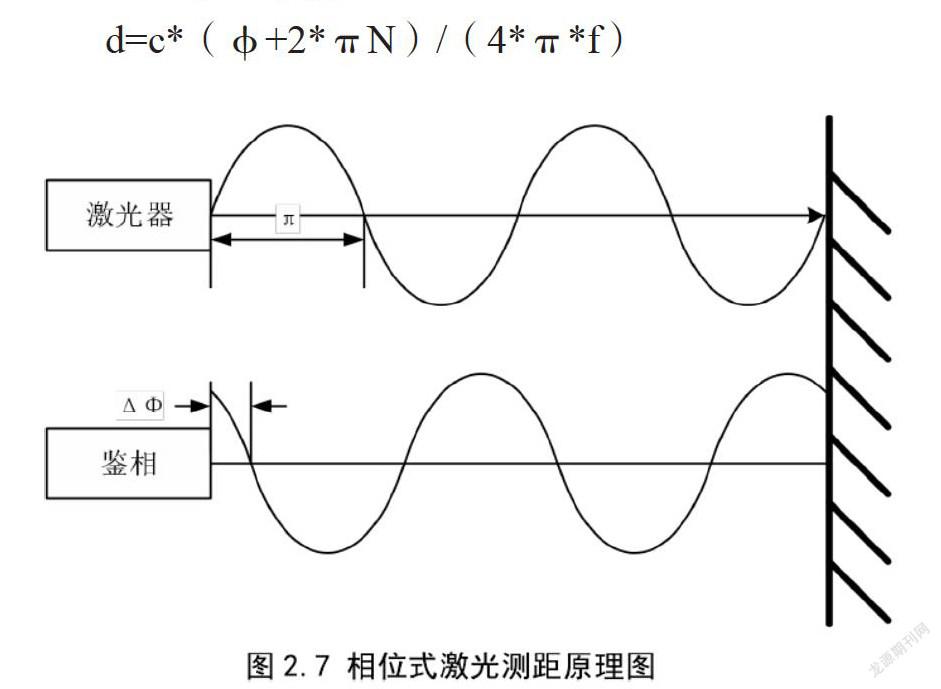
相位式測距(QPD)方法的模型圖和飛行時間(TOF)測距方法相同,它們的區別在于發射的激光脈沖不再是單一的高斯脈沖,而是連續的正弦型激光脈沖(可以通過波形發生器(AWG)來控制所需要的激光波形),相位式測距方法通過計算出發射信號和接收信號的相位差來計算障礙物的距離。
通過對發射信號和接收到的回波脈沖的實時采樣可以得到它們各自的波形圖(三角函數型),對采樣的數據進行 FFT 變換(從時域信號變換到頻域),反解出相應的相位差φ。然后
可以求出距離 d:
d=c*(φ+2*πN)/(4*π*f)
(一般來說 N=0,即測距最大值不能超過一個周期,f 為發射的激光脈沖的頻率)
4 兩種測距方法的比較分析
目前飛行時間測距(TOF)和相位式測距(QPD)是最主流的測距方法,也有很多基于這兩種方法設計出來的激光測距儀器。但是很多時候對于這兩種測距方法的劃分,以及各自的優勢和劣勢并不能找到專門的文獻說明。通過查閱資料和瀏覽最新發表的論文,我對這兩種方法各自的特點和優劣有了更清晰的認識。
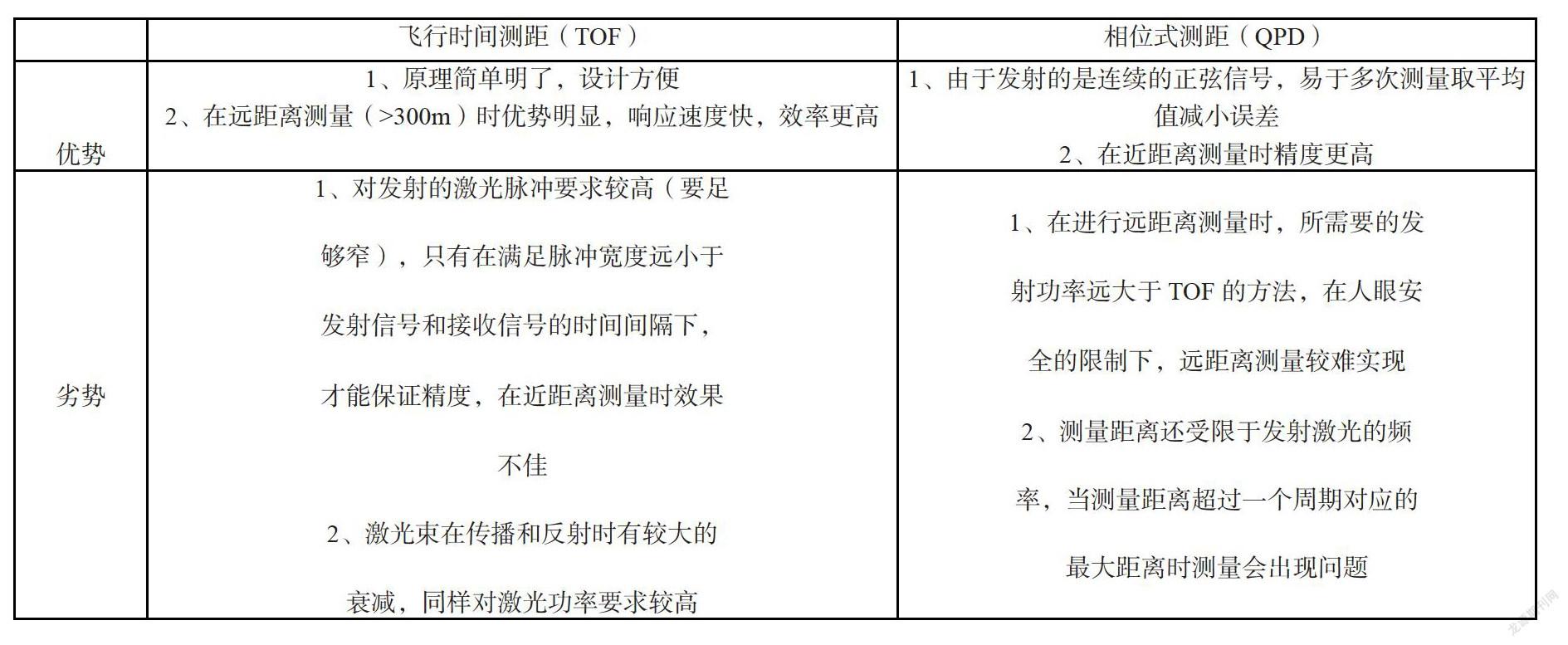
匯總表格如下:
飛行時間測距(TOF) 相位式測距(QPD)
優勢 1、原理簡單明了,設計方便
2、在遠距離測量(>300m)時優勢明顯,響應速度快,效率更高 1、由于發射的是連續的正弦信號,易于多次測量取平均值減小誤差
2、在近距離測量時精度更高
1、對發射的激光脈沖要求較高(要足
1、在進行遠距離測量時,所需要的發
夠窄),只有在滿足脈沖寬度遠小于
射功率遠大于 TOF 的方法,在人眼安
發射信號和接收信號的時間間隔下,
全的限制下,遠距離測量較難實現
劣勢 才能保證精度,在近距離測量時效果
2、測量距離還受限于發射激光的頻
不佳
率,當測量距離超過一個周期對應的
2、激光束在傳播和反射時有較大的
最大距離時測量會出現問題
衰減,同樣對激光功率要求較高
基于兩種方法測距的優勢和劣勢對比,以及目前市面上的車載激光雷達都是基于單一的測距方法,我們可以嘗試去研發一種兩種測距方式相結合的車載激光雷達。通過設置一個閾值,在閾值之下,采用 QPD 的測距方法,當超過閾值的時候,轉換到 TOF 的測距方法,或許這是一個解決目前車載激光雷達困境的一個方法。
5 對于人眼安全的分析
由上面的分析我們可以知道:兩種方式的激光測距方法要達到最大測量距離和測量精度都需要發射較大能量和較窄脈沖寬度的激光。但是我們不能盲目追求性能而忽視安全:當激光強度達到一定閾值的時候會對人眼造成不可逆轉的傷害。下面就激光雷達的人眼安全方面進行分析。
6 激光對人眼的損傷情況
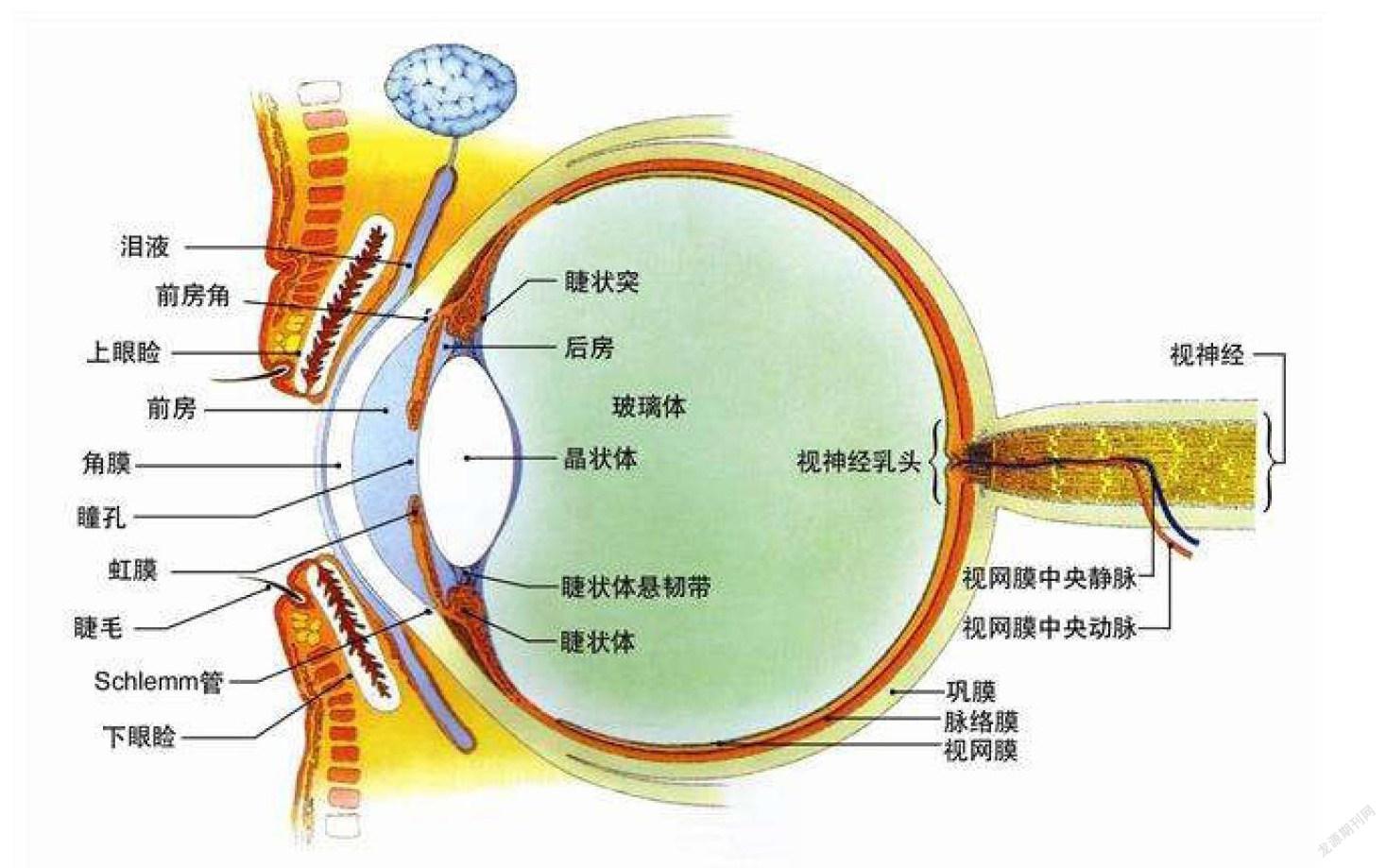
我們知道,人的眼睛近似球形,主要結構有瞳孔、虹膜、晶狀體和視網膜等。
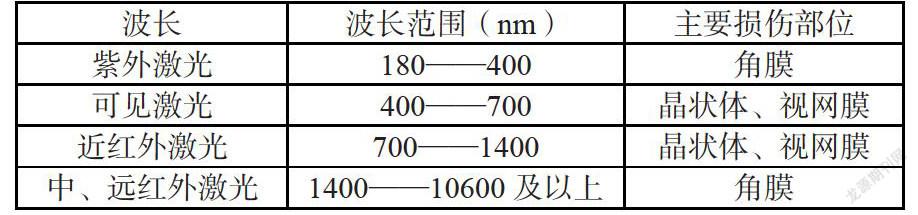
但眼睛和人體的臟器的不同之處在于沒有皮膚角質的保護,極易受到光和其他環境因素的影響。一旦射入眼睛中的激光強度過高,穿透了眼睛的前方組織照射到視網膜上,就會造成視網膜灼傷,出現視力急劇下降甚至失明的情況。照射眼睛的光能量越大、角度越小,對眼睛造成的損傷也就越大。由于激光具有單色性、準直性高、高度相干的特點,這就使得激光比普通的光更容易匯聚成一點,更容易對人眼造成更大的傷害。同時研究發現,不同波段的激光對人眼的傷害程度也有區別。
波長 波長范圍(nm) 主要損傷部位
紫外激光 180——400 角膜
可見激光 400——700 晶狀體、視網膜
近紅外激光 700——1400 晶狀體、視網膜
中、遠紅外激光 1400——10600 及以上 角膜
雖然眼睛對光是很敏感的,但激光雷達所用的激光都在不可見的波段,會在無形中對我們的眼睛造成傷害。所以在設計制造激光雷達的時候,不能為了追求性能就盲目增大發射激光的頻率,人眼安全是一條不可逾越的紅線。
7 車載激光雷達的人眼安全
美國國家激光安全標準 Z136.1(2000)規定了從事激光操作的工作人員的個人最大允許輻射量 MPE,我國的國家標準 GB7247.1-2001 也對激光輻射的安全標準作了規定。但這
些標準主要針對的是激光從業人員和可能經常接觸激光的人員。到目前為止由于無人駕駛的技術還不夠成熟,關于激光雷達的人眼安全標準還沒有出現,在很多情況下都是由開發人員或者科技公司自己來把控,這就存在一定的潛在風險。在一般情況下,人眼所能承受的激光功率僅為 0.4mW,但激光對人眼的損害,發射功率不是關鍵,功率密度才是。由于激光有發散和衰減的特性,即使激光器的發射功率為 1000mW,在進行幾公里遠的測距時,它已經發散成為了幾米大的光斑,在人眼所對應的面積(人的眼球直徑大概 12mm)上的功率遠小于0.4mW。但如果激光器距離人眼只有幾米,即使是輸出功率小于 10mW 的激光器在幾米內形成的光斑的功率密度也很大,在人眼對應的面積上產生的光功率也遠大于 0.4mW,會對人眼造成不可逆的傷害。與傳統的激光相關行業不同,由于車載激光雷達的可移動特性,激光器離人眼的距離存在不可控的情況(有時可能僅有幾米),所以車載激光雷達更需要制定嚴格的標準來保證人眼安全。在制定相關標準的時候,要嚴格考慮到極限條件(即從激光器到車身邊緣距離)下發射出的激光也不能對人眼造成損害。無人駕駛是汽車行業的發展趨勢,只有在起步的時候把隱患消除,無人駕駛技術才能走的更遠,才能成為真正有益于社會發展的技術。
8 總結與展望
目前車載激光雷達的測距方法主要基于飛行時間測距(TOF)和相位式測距(QPD),但還沒有實現 1000m 左右的高精度的車載激光雷達。目前國外關于無人駕駛的相關研究已經走在了我們前面,激光雷達方面的技術儲備也要遠多于國內。以后如果具備實驗條件,我可能會去研發兩種測距方法結合的車載激光雷達,希望未來我能為國內車載激光雷達的發展做出一些貢獻。同時,我也希望國內能有專業的機構和團隊幫助政府盡早設立車載激光雷達的標準,規范國內激光雷達的研究和發展現狀,促進車載激光雷達產業的健康發展。
參考文獻
[1] Design of Lidar-system Martin Andersson Johan Kj?rnsberg
[2] Theoretical limit evaluation of ranging accuracy and power for LiDAR system in autonomous cars Qingyi Zhou,Zhongwei Tan,Chuanchuan Yang
[3] 李哲.相位式激光測距鑒相方法研究[D].2014.
[4] 吳仲,孫飛陽,袁豐.近紅外單光子激光雷達人眼安全分析[J].激光與紅外,2019,49(1):20-25.
[5] 賈泳,高彥偉,林興泰.人眼安全激光測距模組緊湊化設計技術[J].光學與光電技術,2014(6):49-51.
