掠海飛行小目標(biāo)RCS動態(tài)測量方法研究
2019-09-10 02:00:08粘朋雷劉榮豐
艦船電子對抗 2019年4期
關(guān)鍵詞:測量
粘朋雷,劉榮豐
(解放軍91550部隊(duì),遼寧 大連 116023)
0 引 言
目標(biāo)的雷達(dá)截面(RCS)是描述雷達(dá)目標(biāo)信息最重要的參數(shù),特別是掠海飛行小目標(biāo),直接決定著是否能夠被有效識別跟蹤,從而影響其突防性能和作戰(zhàn)使用效果。現(xiàn)階段,對掠海飛行小目標(biāo)的RCS測量主要通過理論計(jì)算和實(shí)際測量,理論計(jì)算是基于電磁散射理論的觀點(diǎn),通過計(jì)算目標(biāo)的等效面積與入射功率密度的乘積得到目標(biāo)的RCS。實(shí)際測量是通過雷達(dá)方程推導(dǎo)出目標(biāo)RCS與定標(biāo)體RCS的線性關(guān)系,根據(jù)定標(biāo)體的RCS得到測量結(jié)果。但是隨著吸波材料等隱身技術(shù)的應(yīng)用,理論計(jì)算的難度和精度受到影響,工程上通常采用暗室測量數(shù)據(jù)作為雷達(dá)系統(tǒng)設(shè)計(jì)的依據(jù)。暗室靜態(tài)測量時,一般輻射源和目標(biāo)的位置不變,雷達(dá)視線位于水平面內(nèi),在測量或計(jì)算過程中,目標(biāo)被置于轉(zhuǎn)臺上,以一定速率勻速轉(zhuǎn)動。轉(zhuǎn)動過程中,目標(biāo)的俯仰角和橫滾角不變,步進(jìn)地改變方位角。由于目標(biāo)實(shí)際飛行過程中雷達(dá)視線俯仰角不可能為固定值,入射方位也不可能呈現(xiàn)均勻間隔步進(jìn),因此靜態(tài)RCS反映的姿態(tài)范圍幾乎都不是實(shí)際雷達(dá)照射到的范圍,利用靜態(tài)數(shù)據(jù)分析目標(biāo)特性僅具有理論參考價值[1]。
動態(tài)目標(biāo)由于在復(fù)雜環(huán)境下的高速運(yùn)動,可能存在如由大氣湍流、海浪起伏等引起的復(fù)雜運(yùn)動形式,也存在由目標(biāo)自身幾何形態(tài)以及重力影響導(dǎo)致的振動、轉(zhuǎn)動等微動[2]。所以動態(tài)實(shí)測的雷達(dá)散射截面與暗室測量或電磁計(jì)算數(shù)據(jù)存在較大差異,測量結(jié)果最為貼近實(shí)戰(zhàn)應(yīng)用,具備更高的可信度和應(yīng)用價值。美國的大西洋試驗(yàn)靶場,基于動態(tài)RCS測量系統(tǒng)可實(shí)現(xiàn)對各種空中目標(biāo)動態(tài)RCS的測量[3-4]。國內(nèi)現(xiàn)在具有對飛機(jī)、陸上飛行目標(biāo)動態(tài)測量的條件[5],但是還未進(jìn)行過掠海飛行小目標(biāo)的動態(tài)測量。
基于此,本文在簡要介紹RCS測量原理的基礎(chǔ)上,對掠海飛行小目標(biāo)在海雜波背景條件下測量的可行性進(jìn)行研究,并對標(biāo)校方法進(jìn)行分析,通過GPS測量系統(tǒng),利用目標(biāo)飛行姿態(tài)和雷達(dá)測量角度,解得測量目標(biāo)的角度。
1 測量原理
目標(biāo)RCS測量原理是金屬標(biāo)準(zhǔn)球定標(biāo)比測法,即對于性能穩(wěn)定的雷達(dá),首先用標(biāo)準(zhǔn)球標(biāo)定出其性能參數(shù)。根據(jù)雷達(dá)方程:
(1)
式中:Pr為雷達(dá)接收機(jī)輸出功率;Pt為雷達(dá)發(fā)射功率;G為雷達(dá)天線增益;λ為雷達(dá)工作波長;σ為導(dǎo)彈雷達(dá)截面積(RCS);F為天線方向圖傳播因子;L為雷達(dá)系統(tǒng)損耗;R為雷達(dá)與目標(biāo)之間距離;a為大氣衰減因子。
將式中相對不變的各參數(shù)用雷達(dá)性能參數(shù)(標(biāo)校系數(shù))K來表示:
(2)
雷達(dá)方程可簡化為:
(3)
當(dāng)用金屬標(biāo)校球?qū)走_(dá)進(jìn)行標(biāo)定時,將測標(biāo)校球時得到的發(fā)射機(jī)功率Pt0、接收機(jī)輸出功率Pr0、標(biāo)校球距離R0、當(dāng)天的大氣衰減因子a,以及已知的σ0(金屬球的RCS),可得到雷達(dá)性能參數(shù):
(4)
在對目標(biāo)的RCS進(jìn)行測量時,用測目標(biāo)時得到的發(fā)射機(jī)功率Ptt、接收機(jī)輸出功率Prt、標(biāo)校球距離Rt,可得到目標(biāo)的RCS為:
(5)
2 海雜波背景下RCS動態(tài)測量可行性分析
對空中目標(biāo)的動態(tài)測量,一般是空中目標(biāo)位于測量雷達(dá)上方,背景為天空,測量時可忽略背景對目標(biāo)回波的影響,但是對掠海飛行小目標(biāo)的RCS測量時,目標(biāo)位于雷達(dá)下方,背景為海洋,此時海雜波可能對目標(biāo)RCS測量產(chǎn)生影響,因此需要對測量的可行性進(jìn)行分析。
海雜波是電磁波照射在海表面后的電磁回波,包含了海面的諸多信息,如浪髙、浪周期、風(fēng)速以及海面介電常數(shù)等,因此海雜波特性與海表面的特征有關(guān)。海表面復(fù)雜多變,仔細(xì)觀察海面可以看到海水各式各樣的形態(tài)恃征,包括浪谷、浪楔、漩渦、浪花以及海浪形成和墜落時散落成的水花,但海表面主要由重力波及毛細(xì)波組成。重力波表現(xiàn)的是海面大尺度的結(jié)構(gòu),由海水重力作為海表面的恢復(fù)力與傳播的驅(qū)動力,通常波長大于5 cm,重力波又被細(xì)分為風(fēng)浪和涌浪,風(fēng)浪由局部風(fēng)引起,有陡峭的波冠;涌浪具有近似正弦的波形、較長周期和波長,由遠(yuǎn)距離的風(fēng)長時間作用引起,即使在沒有“本地風(fēng)”的條件下也可能會具有明顯海表面運(yùn)動[6-7]。
利用加拿大麥克馬斯特大學(xué)(McMaster University)自適應(yīng)系統(tǒng)實(shí)驗(yàn)室(Adaptive Systems Lab)公開的(IPIX)雷達(dá)實(shí)測數(shù)據(jù)[8]。IPIX雷達(dá)具有 X 波段、雙極化相參發(fā)射/接收、頻率捷變、脈沖壓縮、高速數(shù)字采集以及強(qiáng)大的計(jì)算機(jī)控制系統(tǒng)等特點(diǎn)。雷達(dá)天線被安裝在海平面上方大概30 m高處,與典型的艦載雷達(dá)天線所在高度相當(dāng)。
對IPIX雷達(dá)實(shí)測海雜波數(shù)據(jù)進(jìn)行時頻分析,雜波幅度圖和功率譜圖如圖1和圖2所示。
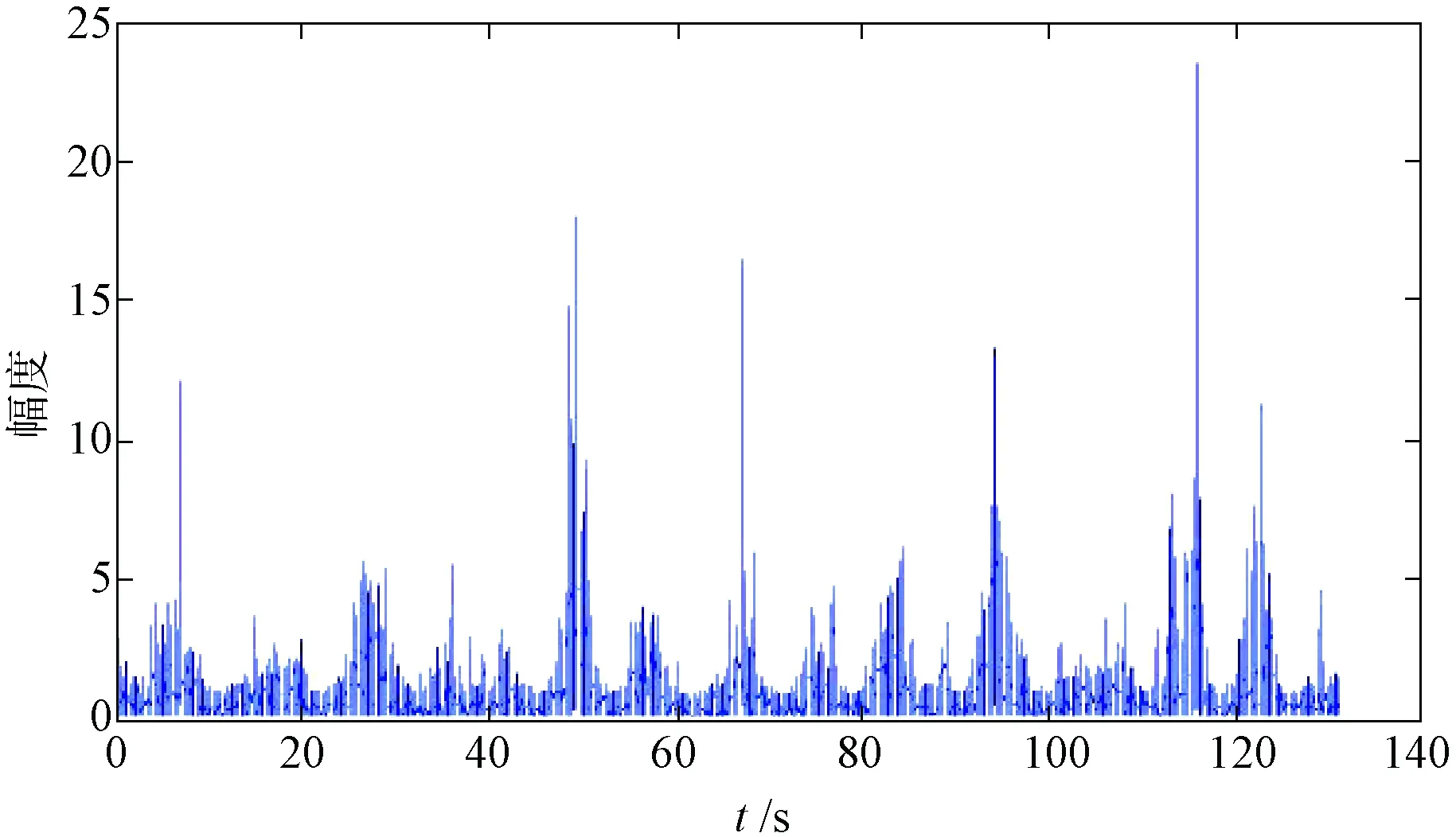
圖1 海雜波時域圖
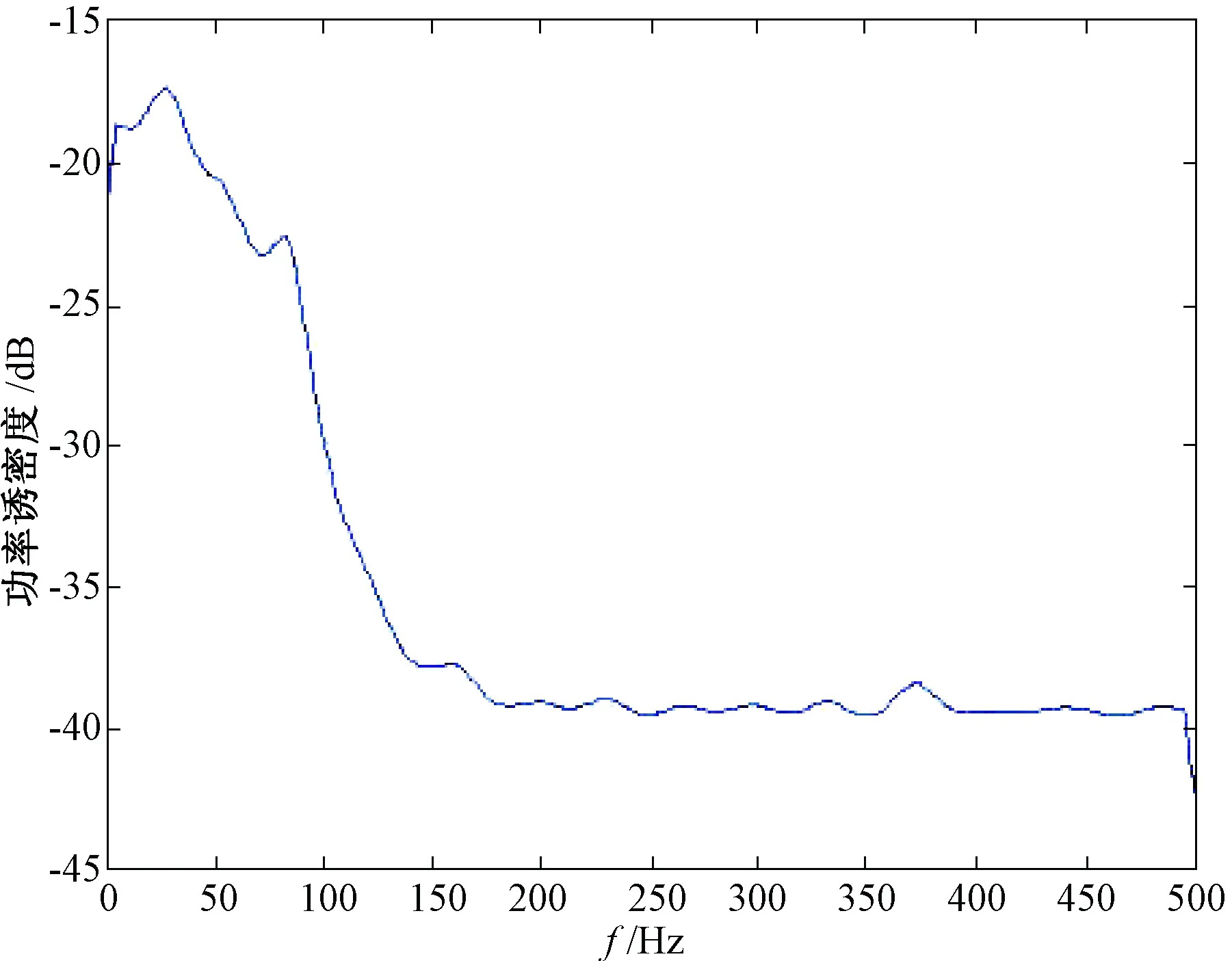
圖2 海雜波頻域圖
海雜波的瞬時頻率一直在隨時間不斷變化,能量分布并不均勻,在不同時間段和不同頻帶內(nèi)強(qiáng)弱也不同,但是能量主要分布在0~150 Hz頻帶內(nèi),平均多普勒頻移的峰值出現(xiàn)在25 Hz左右。
對海雷達(dá)搜索跟蹤掠海小目標(biāo)過程中,由于導(dǎo)彈運(yùn)動產(chǎn)生的多普勒頻率為:
(6)
式中:v為目標(biāo)運(yùn)動速度;c為光速;fc為雷達(dá)信號載頻。
根據(jù)以上分析可知,當(dāng)對海照射雷達(dá)跟蹤掠海飛行小目標(biāo)時,相對于海面為低掠射角,當(dāng)目標(biāo)相對雷達(dá)運(yùn)動速度高時,可忽略海雜波對目標(biāo)的影響,但是目標(biāo)相對雷達(dá)運(yùn)動速度較低時,將影響雷達(dá)對目標(biāo)的搜索跟蹤測量。
3 測量條件
3.1 標(biāo)校球的選擇
由于標(biāo)校球各向同性,回波不隨取向變化,但它的RCS隨電尺寸明顯變化。標(biāo)校球散射的精確解為熟知的Mie級數(shù)。標(biāo)校球的后向RCS計(jì)算公式為:
(7)

以球面積πα2對其進(jìn)行歸一化后可得后向散射有效因子為:
(8)
當(dāng)標(biāo)校球尺寸固定時,雷達(dá)截面積隨頻率的變化會產(chǎn)生抖動。

3.2 測量距離的選擇
RCS是在平面波照射下定義的,要求對目標(biāo)均勻照射,但這是一種理想情況,對于動態(tài)測量來說,當(dāng)飛機(jī)等復(fù)雜目標(biāo)運(yùn)動到距離雷達(dá)非常近的地方時,對目標(biāo)的主要部件將會產(chǎn)生較強(qiáng)的不均勻照射問題。
在工程上有一個基本假設(shè),這就是所謂的遠(yuǎn)場條件:
(9)
式中:R為測試?yán)走_(dá)與測試目標(biāo)之間的距離;d為目標(biāo)在視線方向最大的橫向尺寸;λ為照射波長。
其他誤差來源固定時,滿足遠(yuǎn)場要求所得到的數(shù)據(jù)通常具有1 dB或者更高的精度。
由雷達(dá)方程得雷達(dá)最大作用距離為:
(10)
式中:Pt為雷達(dá)發(fā)射功率;G為雷達(dá)天線增益;λ為工作波長;σ為目標(biāo)雷達(dá)截面積;B為雷達(dá)接收機(jī)等效噪聲帶寬;kTBF為噪聲功率密度(k為波爾茲曼常數(shù),T為雷達(dá)系統(tǒng)噪聲溫度,F(xiàn)是噪聲系數(shù));S/N為雷達(dá)最小可檢測信噪比;L為系統(tǒng)損耗;Rmax為雷達(dá)最大探測距離。
可通過預(yù)估目標(biāo)雷達(dá)截面積得到雷達(dá)最大作用距離。因此,進(jìn)行標(biāo)校和測量時,要求標(biāo)校球、被測目標(biāo)與雷達(dá)的距離均滿足式(9)和式(10)的要求。
4 測量方法
4.1 標(biāo)校方法
RCS測量需要先標(biāo)校再測量。標(biāo)校即對于性能穩(wěn)定的雷達(dá),首先標(biāo)定出其雷達(dá)性能參數(shù)K(式(4))。K值的有效性通過檢查標(biāo)校曲線是否落在允許的范圍內(nèi)(如相對標(biāo)準(zhǔn)球截面積偏差小于1 dB(均方差))來確定。測量時,用標(biāo)定好的K值(與測量時同頻率同極化)代入,計(jì)算被測目標(biāo)的RCS值,這就要求代入計(jì)算的K值與測量時的實(shí)際K值基本一致,即K值偏差在允許的范圍內(nèi),同樣需要標(biāo)校來確認(rèn),即通過測量后再標(biāo)校1次,與測量時所用標(biāo)校K值比較。
目前,外場RCS測量基本上都采用無源標(biāo)校方式,即采用各向同性的金屬標(biāo)準(zhǔn)球作為標(biāo)校體。標(biāo)校時,用氣球或風(fēng)箏等通過系線將標(biāo)準(zhǔn)球升空至距離雷達(dá)合適位置(距離上滿足雷達(dá)信噪比和最小作用距離要求,仰角大于10°以避開雜波背景影響)后,RCS測量雷達(dá)對此散射截面積已知的標(biāo)準(zhǔn)球進(jìn)行測量,得到K值。
在無風(fēng)或微風(fēng)下,可采用氣球吊放標(biāo)準(zhǔn)球;在2~3級以上風(fēng)時,可采用無人機(jī)吊放標(biāo)校球[9]。具體實(shí)施時,需要綜合考慮天氣,標(biāo)校球的重量、氣球或無人機(jī)的載重、經(jīng)費(fèi)等因素,合理選擇標(biāo)校方式。
4.2 動態(tài)測量
使用標(biāo)校球?qū)y量雷達(dá)進(jìn)行標(biāo)校后,掠海飛行小目標(biāo)按照預(yù)定航路進(jìn)行飛行,并實(shí)時記錄保存目標(biāo)經(jīng)緯度、高度、滾動角、俯仰角、航向角,測量雷達(dá)對目標(biāo)進(jìn)行搜索跟蹤,并實(shí)時記錄測量雷達(dá)的俯仰角、方位角,發(fā)射機(jī)功率、接收機(jī)功率。若測量雷達(dá)載體為飛機(jī),則需記錄飛機(jī)的經(jīng)緯度、滾動角、俯仰角、航向角。測量結(jié)束后,在保持雷達(dá)不關(guān)機(jī)的情況下,再次使用標(biāo)校球?qū)走_(dá)進(jìn)行標(biāo)校。
為了保證雷達(dá)對目標(biāo)的有效跟蹤,按照第2節(jié)分析,在航路設(shè)置時,需要目標(biāo)與雷達(dá)相對速度較大,速度大小需要根據(jù)測量雷達(dá)的搜索跟蹤性能決定。
4.3 數(shù)據(jù)處理
RCS測量需要得到此時測量值對應(yīng)的目標(biāo)俯仰角和方位角,假設(shè)R為測量雷達(dá)坐標(biāo)系,b為被測目標(biāo)坐標(biāo)系,則轉(zhuǎn)換矩陣為:
(11)
式中:gb為目標(biāo)點(diǎn)處地理坐標(biāo)系;gR為雷達(dá)處地理坐標(biāo)系。
則坐標(biāo)變換陣為:
(12)
式中:e為地球坐標(biāo)系。
若λR為雷達(dá)所處經(jīng)度,LR為雷達(dá)所處緯度,則:
(13)
若λb為雷達(dá)所處經(jīng)度,Lb為雷達(dá)所處緯度,則:
(14)
由于測量雷達(dá)可位于地面、艦船、飛機(jī),雷達(dá)對目標(biāo)進(jìn)行穩(wěn)定跟蹤時,將基座運(yùn)動對雷達(dá)進(jìn)行補(bǔ)償后,γb為雷達(dá)滾動角,φb為雷達(dá)俯仰角,Ψb為雷達(dá)航向角,則:

(15)
對導(dǎo)彈等箭體目標(biāo),γb為目標(biāo)滾動角,φb為目標(biāo)俯仰角,Ψb為目標(biāo)航向角,則:

(16)
對船和飛機(jī)目標(biāo),γb為目標(biāo)滾動角,θb為目標(biāo)俯仰角,Ψb為目標(biāo)航向角,則:
(17)
將式(12)~(15),式(16)或式(17)代入式(11)可得:
(18)
因此,可得到掠海飛行小目標(biāo)相對于雷達(dá)的姿態(tài)角:
Ψ=-arcsin(T31)
4.4 誤差分析
(1) 天線定位誤差
假設(shè)天線方向圖為cos2形式,并且具有最理想的視軸,則天線定位引起的誤差可表示為:
(19)
式中:2θ0為天線的3 dB波束寬度;θ為最大的定位誤差。
(2) 多路徑照射
對于RCS動態(tài)測量,當(dāng)目標(biāo)以較低的飛行高度飛過海面時,經(jīng)常會在雷達(dá)顯示屏出現(xiàn)明顯的多路徑回波,如果多路徑回波和直接照射回波的波門相距很近,則會對RCS測量精度造成直接的影響。在多路徑照射中,對回波能量有較大貢獻(xiàn)的路徑主要是兩條,即天線-海面-目標(biāo)-天線和天線-目標(biāo)-海面-天線,其他的多次反射能量由于衰減較大可以忽略不計(jì)。
按最差的情況,多路徑照射引起的RCS不確定度可以由下式估計(jì):
(20)
x=2ρ10-|ΔG|/20
(21)
式中:ρ為反射系數(shù);ΔG為直接路徑和非直接路徑的增益差。
(3) 交叉極化
如果RCS動態(tài)測量雷達(dá)沒有很好的極化隔離,則交叉極化會引起較大的RCS測量誤差。對于一般的復(fù)雜目標(biāo),假設(shè)散射矩陣的各分量相等,則由交叉極化引起的RCS測量不確定度可由下式估算:
σ(dB)=-20lg(1-2×10-p/20)
(22)
式中:εp(dB)為天線的極化隔離度。
(4) 頻率漂移
假設(shè)被測目標(biāo)的RCS、標(biāo)準(zhǔn)體的RCS以及系統(tǒng)增益與頻率不具有強(qiáng)相關(guān)性,則由頻率漂移引起的RCS測量不確定度可以由下式估算:
(23)
式中:Δf為有效的系統(tǒng)帶寬;f為中心頻率。
(5) 噪聲與背景
系統(tǒng)噪聲對測量誤差有較大貢獻(xiàn),對于信號S,由噪聲N引起的RCS不確定度可由下式計(jì)算:
Δσ(dB)=-20lg(1-2×10-εn/20)
(24)
式中:εn=20lg(S/N)。
(6) 標(biāo)準(zhǔn)體
RCS動態(tài)測量中采用的標(biāo)準(zhǔn)體一般為一定大小的金屬球,在光學(xué)區(qū),理論上金屬球的RCS是各向同性的,但由于機(jī)械公差等因素的影響,球的規(guī)則性、表面的光度、潔度等方面都會存在一些問題,作為標(biāo)準(zhǔn)體的金屬球,其RCS 也會隨著測量條件的不同而發(fā)生一定的變化,特別是對于較短的波長尤其是毫米波照射時,金屬球的誤差將對被測目標(biāo)的RCS精度產(chǎn)生很大的影響。
5 結(jié)束語
本文對掠海飛行小目標(biāo)在海雜波背景條件下測量可行性進(jìn)行分析的基礎(chǔ)上,研究比對動態(tài)測量的標(biāo)校方法,針對不同條件選擇不同的標(biāo)校方法,通過測量雷達(dá)對目標(biāo)RCS測量后,利用GPS測量系統(tǒng),得到目標(biāo)飛行姿態(tài)和雷達(dá)測量角度,最后得到測量值對應(yīng)的目標(biāo)視線角度,可為后續(xù)掠海飛行小目標(biāo)RCS動態(tài)測量提供參考。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00