RN1901型齒狀切刀式偏心輪地瓜秧收割機(jī)的研究
2019-09-10 18:53:16李慧林偉孫策郭春瑤
今日農(nóng)業(yè) 2019年6期
李慧 林偉 孫策 郭春瑤


摘要:針對(duì)目前市場(chǎng)缺少地瓜秧收割機(jī)的現(xiàn)象以及現(xiàn)有地瓜秧收割機(jī)結(jié)構(gòu)復(fù)雜、生產(chǎn)成本高的問(wèn)題,設(shè)計(jì)出一種小型齒狀切刀式偏心輪地瓜秧收割機(jī),該設(shè)計(jì)主要包括齒狀切刀①、齒狀切刀②、抓秧器和存儲(chǔ)箱,結(jié)構(gòu)簡(jiǎn)單,可使用普通農(nóng)用拖拉機(jī)牽引工作,本身無(wú)需提供動(dòng)力,生產(chǎn)成本較低,適用于目前普遍小規(guī)模種植地瓜的農(nóng)村地區(qū),能夠較好地實(shí)現(xiàn)地瓜秧的高效收割。關(guān)鍵詞:齒狀切刀;偏心輪;抓秧器;地瓜秧收割機(jī)
中圖分類號(hào):S225
文獻(xiàn)標(biāo)識(shí)碼:A
引言
地瓜是我國(guó)重要的糧食種類之一,也是重要的工業(yè)原料和新型能源用原料,是世界糧食生產(chǎn)的底線作物和極具競(jìng)爭(zhēng)力的能源作物,亦是優(yōu)質(zhì)的抗癌保健食品,同時(shí)也是欠發(fā)達(dá)地區(qū)主要經(jīng)濟(jì)收入之一,生產(chǎn)意義重大。據(jù)聯(lián)合國(guó)糧食及農(nóng)業(yè)組織統(tǒng)計(jì),我國(guó)地瓜種植面積約為3.673×16 hm2,約占世界地瓜種植總面積的45.06%;總產(chǎn)量約為8.52萬(wàn)t,約占世界地瓜總產(chǎn)量的77.38%。我國(guó)地瓜種植面積和總產(chǎn)量均居世界第一。目前,小規(guī)模種植的地瓜秧收割主要依靠人工,由于地瓜秧交叉纏繞以及瓜秧壟間生根,造成拖拽困難,勞動(dòng)強(qiáng)度大,人工收割費(fèi)時(shí)費(fèi)力。
針對(duì)以上問(wèn)題,設(shè)計(jì)出一種齒狀切刀式偏心輪地瓜秧收割機(jī),以代替人工出現(xiàn)地瓜秧的收割工作。該機(jī)適用于我國(guó)小規(guī)模種植地瓜的農(nóng)村地區(qū),具有結(jié)構(gòu)簡(jiǎn)單、生產(chǎn)成本較低、操作方便、工作效率高等特點(diǎn)。
1主要結(jié)構(gòu)及工作原理
1.1 基本結(jié)構(gòu)
RN1901型齒狀切刀式偏心輪地瓜秧收割機(jī)主要包括機(jī)架、存儲(chǔ)箱、齒狀切刀、齒狀切刀和抓秧器。該收割機(jī)本身無(wú)需動(dòng)力,通過(guò)農(nóng)用拖拉機(jī)牽引工作,其結(jié)構(gòu)示意如圖1所示。
1.2工作原理
齒狀切刀式偏心輪地瓜秧收割機(jī)通過(guò)農(nóng)用拖拉機(jī)牽引工作,本身無(wú)需提供動(dòng)力,在工作時(shí),齒狀切刀①傾斜安裝,用于切斷壟上地瓜秧根部與地瓜連接部分;齒狀切刀②安裝于機(jī)架兩側(cè),相對(duì)于齒狀切刀①較大,用于切斷兩壟之間地瓜秧的連接;抓秧器位于機(jī)架后方,通過(guò)偏心輪作用推動(dòng)抓秧?xiàng)U,抓秧?xiàng)U與地面或者地瓜秧接觸,利用拖拉機(jī)的牽引運(yùn)動(dòng)帶動(dòng)抓秧器旋轉(zhuǎn),抓秧?xiàng)U抓取地瓜秧放入存儲(chǔ)箱,此時(shí),抓秧?xiàng)U從偏心輪高點(diǎn)回落,縮入抓秧器內(nèi),松開(kāi)抓取的地瓜秧,以實(shí)現(xiàn)地瓜秧的自動(dòng)收割。
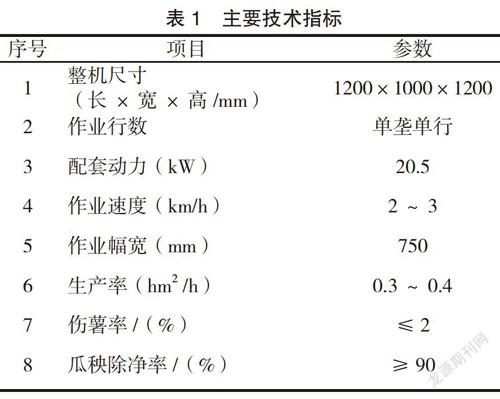
1.3主要技術(shù)參數(shù)
1.4關(guān)鍵部件設(shè)計(jì)
1.4.1齒狀切刀
切刀是地瓜秧收割機(jī)的重要工作部件,其切割性能直接影響作物的收獲質(zhì)量和效果。考慮到地瓜秧生長(zhǎng)秧蔓長(zhǎng)、易纏繞的特點(diǎn),本設(shè)計(jì)選用結(jié)構(gòu)簡(jiǎn)單,性能穩(wěn)定的圓盤式切割方式,結(jié)構(gòu)如圖2所示。該刀具采用滑切的方式,降低了切割阻力和功率消耗,減少了刀具的疲勞損傷。
齒狀切刀②直徑取50cm,以防止由于切刀過(guò)小出現(xiàn)的收割機(jī)整體壓在壟上,齒狀切刀②與壟間地面不接觸的現(xiàn)象。此外,齒狀切刀②與齒狀切刀①原理相同,只是大小不一致,因此在進(jìn)行收割工作之前只要調(diào)整好齒狀切刀①的位置就可同時(shí)實(shí)現(xiàn)壟上地瓜秧的切割。
1.4.2抓秧器
地瓜秧夾持輸送裝置,即抓秧器,在地瓜秧收割機(jī)中具有很重要的地位,夾持輸送的穩(wěn)定性,直接影響到瓜秧收獲除凈率的提高。根據(jù)地瓜秧交叉縱橫的特點(diǎn),RN1901型齒狀切刀式偏心輪地瓜秧收割機(jī)采用圖3所示的抓秧器。
抓秧器由支撐軸、偏心輪、彈簧、抓秧?xiàng)U、和滾筒構(gòu)成,位于地瓜秧收割機(jī)的后側(cè),在齒狀切刀①和齒狀切刀②切斷地瓜秧之后將地瓜秧進(jìn)行收集并放入存儲(chǔ)箱中。
在抓秧器運(yùn)行過(guò)程中,抓秧器中間支撐軸和偏心輪固定不動(dòng),由于彈簧的彈力作用,使抓秧?xiàng)U貼近偏心輪。抓秧器下部抓秧?xiàng)U與地面或者地瓜秧接觸,在拖拉機(jī)的牽引力下抓秧?xiàng)U帶動(dòng)滾筒向前滾動(dòng),當(dāng)抓秧?xiàng)U到達(dá)遠(yuǎn)離偏心輪的旋轉(zhuǎn)中心位置時(shí),偏心輪將抓秧?xiàng)U推出,此時(shí)抓秧?xiàng)U抓取地瓜秧;當(dāng)抓秧?xiàng)U到達(dá)靠近偏心輪旋轉(zhuǎn)中心位置時(shí),在彈簧作用下將抓秧?xiàng)U推入滾筒內(nèi)部,抓秧?xiàng)U收縮,將抓取的地瓜秧松開(kāi),此時(shí)地瓜秧進(jìn)入存儲(chǔ)箱儲(chǔ)存。
抓秧器中偏心輪與支撐軸之間的位置可調(diào),通過(guò)調(diào)整偏心輪在支撐軸上的位置,使得抓秧?xiàng)U在遠(yuǎn)離存儲(chǔ)箱人口時(shí)在偏心輪的作用下伸出,到達(dá)底端時(shí)抓取地瓜秧,并使地瓜秧隨著滾筒的轉(zhuǎn)動(dòng)纏繞在滾筒上;使得抓秧?xiàng)U在靠近存儲(chǔ)箱入口時(shí)抓秧?xiàng)U縮入滾筒內(nèi)部,避免與存儲(chǔ)箱入口碰撞的同時(shí)將抓取的地瓜秧放開(kāi)。
1.4.3抓秧?xiàng)U
抓秧器位于抓秧器上連桿處,中抓秧?xiàng)U如圖4所示,抓秧?xiàng)U上設(shè)置六條豎直桿,每條桿上套有彈簧,用于抓秧?xiàng)U的收縮運(yùn)動(dòng),避免桿與地面或者存儲(chǔ)器入口的碰撞。最中間兩條桿之間距離較寬,目的防止中間的桿在抓取地瓜秧時(shí)對(duì)地瓜造成損傷。六根桿對(duì)稱分布且長(zhǎng)短不一,靠近中間的桿較短,外側(cè)的桿較長(zhǎng),這是由于地瓜怕澇,目前普遍采用成壟種植模式,長(zhǎng)短不一的桿可實(shí)現(xiàn)對(duì)壟上地瓜秧的抓取和壟間地瓜秧的抓取,避免出現(xiàn)由于桿長(zhǎng)相同使得外側(cè)桿懸浮而無(wú)法抓取壟間地瓜秧的現(xiàn)象,圖5為抓秧?xiàng)U與地壟示意圖。
1.4.4滾筒
抓秧器中滾筒如圖6所示,滾筒兩側(cè)支撐桿呈輻射狀,既用于支撐滾筒外圓,又與抓秧?xiàng)U配合,使抓秧?xiàng)U在輻射狀支撐桿上滑動(dòng),確定抓秧?xiàng)U的移動(dòng)軌跡。滾筒中間支撐桿數(shù)目與輻射狀支撐桿一致,中間支撐桿上開(kāi)設(shè)小孔,用于抓秧?xiàng)U的伸縮,小孔位置與抓秧?xiàng)U上的桿位置一一對(duì)應(yīng)。
抓秧器滾筒本身不提供動(dòng)力,由于抓秧?xiàng)U與地面或者地瓜秧的接觸,以及拖拉機(jī)的牽引作用,抓秧?xiàng)U會(huì)形成旋轉(zhuǎn)運(yùn)動(dòng),且根據(jù)抓秧?xiàng)U與滾筒的配合,抓秧?xiàng)U帶動(dòng)滾筒實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng)。基于這種抓秧?xiàng)U和滾筒的旋轉(zhuǎn)運(yùn)動(dòng),將地瓜秧纏繞于滾筒上,最后放于存儲(chǔ)箱中。圖7為抓秧器工作示意圖。
3結(jié)論
對(duì)關(guān)鍵部件進(jìn)行了結(jié)構(gòu)設(shè)計(jì)和參數(shù)分析,確定了仿齒狀切刀和抓秧器的結(jié)構(gòu)參數(shù)和運(yùn)動(dòng)參數(shù);使用圓盤式齒狀切刀切斷壟間瓜秧和壟上瓜秧,無(wú)需對(duì)切刀提供動(dòng)力,隨收割機(jī)向前運(yùn)動(dòng)即可切斷瓜秧,防止收割瓜秧時(shí)對(duì)地瓜造成損傷設(shè)計(jì)出一種偏心輪抓秧器,該裝置在偏心輪高點(diǎn)時(shí)推出抓秧?xiàng)U,用以抓取瓜秧,通過(guò)抓秧器旋轉(zhuǎn)到存儲(chǔ)箱位置時(shí)抓秧?xiàng)U從偏心輪高點(diǎn)回落,將瓜秧松開(kāi),放入存儲(chǔ)器中,并且抓秧器同樣無(wú)需提供動(dòng)力,隨收割機(jī)前進(jìn)的同時(shí)旋轉(zhuǎn)。
參考文獻(xiàn):
[1]高明珠.馬鈴薯收獲機(jī)械發(fā)展探討[J].農(nóng)業(yè)科技與裝備.2011(12):31-33.
[2]李寶筏.農(nóng)業(yè)機(jī)械學(xué)[H].北京:中國(guó)農(nóng)業(yè)出版社,2003:158-1 60.
[3]李洪民.國(guó)內(nèi)外甘薯機(jī)械化產(chǎn)業(yè)發(fā)展現(xiàn)狀[J].江蘇農(nóng)機(jī)化.2010(2):40-42.
[4]胡良龍,胡志超,田立佳等.我國(guó)丘陵薄地甘薯生產(chǎn)機(jī)械化發(fā)展研討[J].中國(guó)農(nóng)機(jī)化,2012(5):14-16.
[5]胡良龍,田立佳等.4GS-1500型甘薯寬幅收獲機(jī)的研究設(shè)計(jì)與試驗(yàn)[J].中國(guó)農(nóng)機(jī)化學(xué)報(bào),2011(5):15-17.
[6]胡良龍,胡志超,王冰等.國(guó)內(nèi)甘薯生產(chǎn)機(jī)械化研究進(jìn)展與趨勢(shì)[J].中國(guó)農(nóng)機(jī)化,2012(2):14-16.
[7]胡良龍,田立佳,計(jì)福來(lái)等.國(guó)內(nèi)甘薯生產(chǎn)收獲機(jī)械化制因思考與探討[J].中國(guó)農(nóng)機(jī)化,2011(3):16-18.
[8]胡良龍,胡志超,謝一芝等.我國(guó)甘薯生產(chǎn)機(jī)械化技術(shù)路線研究[J].中國(guó)農(nóng)機(jī)化,2011(6):20-25.
[9]胡志超,彭寶良,尹文慶等.多功能根莖類作物聯(lián)合收獲機(jī)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2008(3):58-61.
[10]胡志超,王海鷗,胡良龍,等.馬鈴薯機(jī)械化收獲技術(shù)概況與發(fā)展[J].農(nóng)業(yè)機(jī)械,2007(4):63-65.
[11]胡志超,彭寶良,謝煥雄,等.升運(yùn)鏈?zhǔn)交ㄉ斋@機(jī)的設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(11):220-222.
[12]黃霖.Abaqus /CAE二次開(kāi)發(fā)功能與應(yīng)用實(shí)例[J].計(jì)算機(jī)輔助工程,2011,(4):96-100.農(nóng)業(yè)機(jī)械手冊(cè)[H].機(jī)械工業(yè)出版社,1991.
[13]裴巖,樊柴管.甘薯機(jī)械的市場(chǎng)化研究[J].當(dāng)代農(nóng)機(jī)學(xué)術(shù)交流,2016 (8):72-73.
[14]施智浩,胡良龍,吳努,胡志超,王冰.馬鈴薯和甘薯種植及其收獲機(jī)械[J].農(nóng)機(jī)化研究,2015(4):265-268.
[15]施印炎,陳滿,汪小旵,章永年,ODHIAMBO Morice Oluoch.蘆蒿的有序收獲機(jī)切割器動(dòng)力學(xué)仿真與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2017(2):110-116。
[16]L.U.Opara. Engineering principles ofagriculturalmachines在[J].Computers and Electronics inAgriculture,1997,18(1):55-57.
[17]M. Bentini,C. Caprara,R. Martelli. HarvestingDamage to Potato Tubers by Analysis of Impactsrecorded with an Instrumented Sphere[J]. BiosystemsEngineering,2006,94(1):75-78.
作者簡(jiǎn)介:李慧(1991-),女,山東省臨沂市,研究生,助理工程師;林偉(1994-),男,山東省臨沂市費(fèi)縣,碩士,研究方向:數(shù)字化設(shè)計(jì)與制造;孫策(1995-),男,河南省駐馬店市,本科,碩士在讀,研究方向:先進(jìn)制造技術(shù);郭春瑤(1996-),女,山東省淄博市,本科。
