基于STM32的微型四軸救援機的設計與實現
2019-09-10 07:22:44張宏偉錢葉冊許衛兵
現代信息科技 2019年1期
張宏偉 錢葉冊 許衛兵

摘? 要:本文設計的救援機采用STM32作為主控芯片,以四軸無人機為載體,利用無線模塊進行控制,人體生命檢測模塊進行檢測,GPS模塊進行定位,以實現救援的目的。利用四軸無人機搭載的人體檢測模塊對某一區域進行檢測,當檢測到受災人員時,該模塊會發送信號到主控芯片,然后主控芯片會將受災人員的位置及時反饋給救援人員,那么在救援人員到達搜救地點之前,就可以利用無線對話模塊對被困人員進行心理安慰及疏導,從而大大提高了救援的工作效率。
關鍵詞:STM32;四軸無人機;人體生命檢測;GPS定位
中圖分類號:V249.1? ? 文獻標識碼:A 文章編號:2096-4706(2019)01-0158-02
Design and Implementation of Micro Four-axis Rescue Machine Based on STM32
ZHANG Hongwei,QIAN Yece,XU Weibing
(School of Mechanical and Electrical Engineering,Chizhou University,Chizhou? 247000,China)
Abstract:The rescue aircraft designed in this paper uses STM32 as the main control chip,four-axis UAV as the carrier,uses wireless module to control,human life detection module to detect,and GPS module to locate,in order to achieve the purpose of rescue. The human body detection module carried by four-axis UAV is used to detect a certain area. When the disaster victims are detected,the module will send signals to the main control chip,and then the main control chip will feedback the location of the disaster victims to the rescuers in time. Then the wireless pair can be used before the rescuers arrive at the search and rescue site. The speech module can comfort and guide the trapped personnel,thus greatly improving the efficiency of rescue work.
Keywords:STM32;four axis UAV(unmanned aerial vehicle);human life detection;GPS location
1? 概述
地震、火災、礦難等災難發生后,在廢墟中搜尋幸存者,給予必要的醫療救助,并盡快救出被困者是救援人員面臨的緊迫任務。實際經驗表明,超過48小時后被困在廢墟中的幸存者存活的概率變得越來越低。由于災難現場情況復雜,在救援人員自身安全得不到保證的情況下是很難進入現場開展救援工作的,此外,廢墟中形成的狹小空間使施救人員甚至搜救犬難以進入,從而大大延長了救援時間。四軸救援機可以很好地解決上述問題。四軸救援機可以在災難發生后第一時間進入災難現場尋找幸存者,進入救援人員無法進入的現場搜集有關信息并及時反饋給救援指揮中心,以便救援中心能做出最合理有效的救援方式,對被困人員提供基本的醫療救助服務。
四軸救援機是一種能夠垂直起降、多旋翼式的飛行器,其通過自帶的電源驅動電機來提供動力。因其具有靈活性高、所需飛行空間小、能源利用率高、隱蔽性強以及安全性能高等優勢,特別適合在近地面環境(如室內、城區和叢林等)中執行監視、偵查任務,其在軍事(電子戰)和民用(通信、氣象、災害監測)方面都有很大的應用前景。另外,新穎的外形、簡單的結構、低廉的成本、卓越的性能及獨特的飛行控制方式(通過控制四只旋翼的轉速實現飛行控制)使其對廣大科研人員具有很強的吸引力,成為國際新的研究熱點。
基于STM32的微型四軸救援機的有效實施會增加地震被困者的生存幾率,降低地震災難帶來的人員傷亡數量。作為不可抗因素,地震對人類的危害不容小覷,其一旦發生就有可能造成不計其數的財產損失和人員傷亡,但限于人類技術原因,通過震前預測來減少地震損失的方法還不是很現實,因此我們只能通過震后救援工作來減少財產損失和人員傷亡。而本文的基于STM32的微型四軸救援機就是針對這一問題進行設計的。當地震發生時,其可以快速有效地解救被困人員,把地震對人類生命安全的威脅降到最低,筆者對本項目進行設計以期在最大程度上,高效率地支援地震救災工作,為國家貢獻一份自己的力量。
2? 系統組成
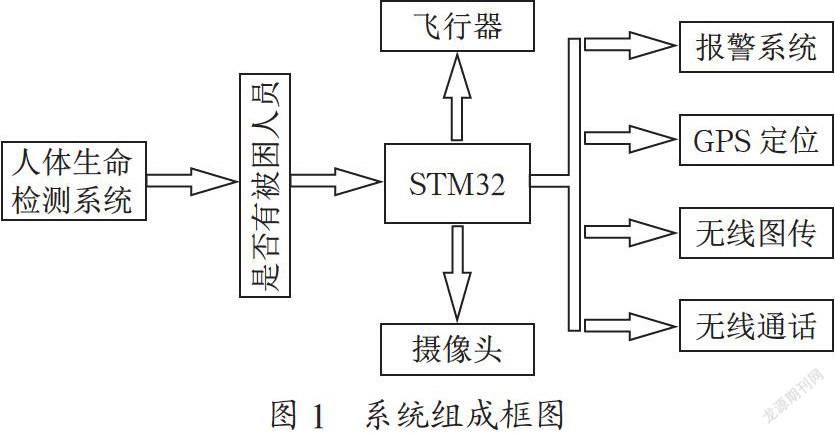
本文設計的基于STM32的微型四軸救援機系統框架如圖1所示,根據功能,可以將整個系統分為主控芯片,人體生命檢測系統,飛行器控制系統,攝像系統,報警系統,定位系統,無線圖傳以及無線通話等八大部分。STM32芯片是主控芯片;人體生命檢測系統是該設計的核心部分,用來檢測被困人員的生命特征信息;飛行器控制系統對四軸飛行器的飛行狀態進行控制及調整;攝像系統可以對受災地區的實時情況進行拍攝,然后通過無線圖傳系統實時上傳到救災指揮部;報警系統可以在人體生命檢測系統檢測到受災人員的生命體征時而報警的;定位系統可以將發現的被困人員地理位置及時地發送給指揮部,以便于其及時實施救援;無線通話的功能是在救援人員到達被困人員的被困地點之前,為指揮部對被困人員進行安慰以及心理疏導提供溝通渠道。
3? 系統硬件設計
四軸救援機的硬件設計包括對主控芯片、電源模塊、晶振電路、傳感器接口及無線控制電路等各部分的設計。
主控芯片為STM32單片機,其外圍有晶振電路和復位電路。晶振電路采用電容-考畢茲交流等效震蕩電路,即通過兩端增加電容組成分立RC振蕩器,由兩個22P的電容和8HZ的晶振構成的電路,為單片機提供時間周期。復位電路由電阻、電容、二極管和開關按鍵等電子器件構成,整體電路的直接作用就是將電路恢復到起始狀態,就如同計算器的清零按鈕,可以通過一鍵式操作使整個系統回到原始狀態,重新投入工作,該電路具有上電自動復位和手動復位兩種復位方式。
人體檢測系統采用的是人體紅外感應模塊檢測。其中熱釋電紅外傳感器是一種能檢測人體或動物發射的紅外線而輸出電信號的傳感器。熱釋電晶體目前已廣泛用于紅外光譜儀、紅外遙感以及熱輻射探測器等方面,它可以作為紅外激光的一種較理想的探測器。熱釋電紅外傳感器目前被廣泛地應用在各種自動化控制裝置中。
飛行控制操作桿通過兩個四向按鍵來控制四軸飛行器的運動狀態,其中一個四向按鍵控制飛行器的飛行方向,即前后左右;另一個四向按鍵的兩向按鍵控制飛行器的飛行速度,另外兩個按鍵KEY_L,KEY_R調整飛行器的姿態,即左側飛和右側飛。蜂鳴器是檢測到被困人員時的報警器,當檢測到某一區域存在被困人員時,飛行控制操作桿上的蜂鳴器開始報警。另外,該蜂鳴器還能充當飛行器電池電量的報警器,當電量低于10%時,蜂鳴器以不同于檢測到被困人員報警時的頻率報警提示電池電量過低。另外,飛行控制操作桿上搭載OLED顯示屏可以顯示飛行器飛行過程中的各種參數,而且還可以利用按鍵對控制飛行器飛行的各種參數進行調整處理,使飛行器在飛行過程中能夠更加平穩,從而提高搜救的成功率,保障人民的生命財產安全。
4? 系統軟件設計
系統軟件部分采用模塊化設計,分為主控模塊、飛行器控制模塊、信息采集模塊、顯示模塊、上位機模塊、攝像頭以及傳輸模塊等七個模塊。其中主控模塊的程序流程如圖2所示。
當整個系統上電時,飛行控制操作桿通過無線模塊和飛行器進行通信,從而對飛行器的飛行狀態進行控制。當人體檢測模塊檢測到被困人員時,通過無線系統將被困人員的各種數據傳到上位機,并產生警報,同時將被困人員的地理位置發送給上位機;攝像頭可以將實時拍攝到的圖片信息通過無線圖傳傳送給上位機;上位機也可以將指揮部發出的語音信息傳送給被困人員。
5? 結? 論
本文設計了基于STM32的微型四軸救援機并對該設計的軟硬件進行了詳細的介紹。整個設計具有操作性強,實用性高等特點,可由零經驗的人進行操控,無需專門培訓,極大地提高了搜救效率。通過本設計,筆者對無線技術和飛行器的控制技術有了更深入的了解,對書本知識和實際應用的區別也有了較為深刻的認識。但由于時間有限、個人水平和經驗不足,此設計在許多方面還有待完善,比如系統的無線穩定性及有效傳輸距離和人體檢測模塊的穩定性等。在接下來的研究中,筆者將把理論知識與實踐應用相結合,從而針對性地解決實際應用中的問題,以期實現基于STM32的微型四軸救援機設計的進一步完善,發揮基于STM32的微型四軸救援機減少傷亡數量的作用,為相關研究提供有力參考。
參考文獻:
[1] 彭軍橋.非共軸式碟形飛行器研究 [D].上海:上海大學,2001:1-68.
[2] 吳東國.基于四旋翼飛行器平臺的低空遙感技術在公路環境調查中的應用 [J].公路交通技術,2012(6):137-138.
[3] 姬江濤,扈菲菲,賀智濤,等.四旋翼無人機在農田信息獲取中的應用 [J].農機化研究,2013,35(2):1-4.
[4] 趙晨,杜勇.四旋翼無人機在輸電線路巡視中的應用 [J].湖北電力,2012,36(6):35-36.
[5] 張鵬,程飛,曹宇強,等.一種新型四軸搜救飛行器設計 [J].科技廣場,2010(9):145-147.
[6] 劉慶元,徐柳華,沈彩蓮,等.基于無人飛行器遙感影像的數字攝影測量關鍵技術研究 [J].測繪科學,2010,35(1):28-30.