無人駕駛汽車:人車合一的未來
2019-09-10 07:22:44樂佳
電腦報 2019年17期
樂佳
無人駕駛(或者說自動駕駛)的概念并不新鮮,其在航空領域早已有了成熟的應用,我們乘坐的民航客機,在其進入巡航階段后,都是通過自動駕駛進行自動飛行的。相較于萬米高空單一的飛行環境,汽車在陸地上的行駛環境要復雜得多,因此無人駕駛技術在汽車領域一直未得到大規模的應用。近年來,隨著傳感器、人工智能、智能芯片、高性能計算等技術的快速發展,汽車領域的無人駕駛研究也逐漸興起,多家汽車制造公司和互聯網科技公司都對無人駕駛的研究與開發表現出了極大的熱情,逐年加大對無人駕駛技術研究的投入。那么,什么是無人駕駛?無人駕駛包含哪些內容?無人駕駛的發展現狀又是什么?本文希望用通俗易懂的語言對這些內容進行介紹。
無人駕駛的分級
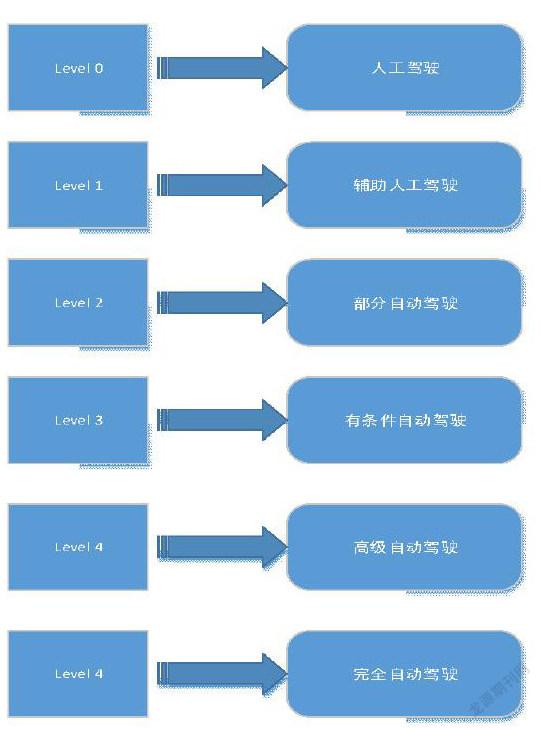
很多人將無人駕駛和自動駕駛混為一談,從字面意思上來說兩者含義的確很相近,但從技術層面來說,無人駕駛嚴格意義上是自動駕駛的最終目標。國際汽車工程師協會(SAE International)將自動駕駛分為了6個等級:Level 0到Level 5,如下圖所示。Level 0對應的就是人工駕駛,也即傳統的駕駛級別,完全由人進行操縱,汽車根據人的指令行進、變道、剎車等。Level 1被稱為輔助人工駕駛,汽車可以為駕駛員提供一定的駕駛幫助,比如現在很多汽車都有的:定速巡航系統和自動制動系統等。Level 2級別要求汽車能提供部分的自動駕駛功能,但需要駕駛員隨時監控以便發生情況立即接管汽車的控制,比如:自適應巡航等。Level 3則可以解放駕駛員的手腳,汽車可以獨立完成大部分的駕駛操作,但還是需要駕駛員監控運行情況以便對很多人工智能無法處理的情況進行接管。Level 4和Level 5則是完全的自動駕駛,不再需要駕駛員參與,也即無人駕駛。Level 4和Level 5的區別在于:Level 4要限定汽車行駛的場景,比如:高速公路等;而Level 5則是在任何路況、任何環境下。也就是說只有當自動駕駛達到了Level 4和Level 5才能算真正的無人駕駛。
無人駕駛的原理
通常來說,無人駕駛是感知技術、智能計算、智能控制等相關技術的綜合實現。感知技術,指的就是無人汽車上的各種傳感器:攝像頭、激光雷達、C-V2X等,用來實時收集汽車運行過程中復雜的路況信息;智能計算,則是汽車上的計算單元通過對各個傳感器收集到的路況數據進行融合并進行智能分析,從而對汽車的各個控制系統下達控制指令;智能控制,則接受計算單元下達的命令,控制汽車的行進、轉彎、變道和剎車等。就像我們開車要“眼觀六路耳聽八方”一樣,感知技術相當于無人駕駛的“眼睛”,時刻觀察周圍的情況;智能計算則相當于“大腦”,需要根據觀察到的情況快速地作出反應;智能控制則相當于“四肢”,根據“大腦”的指令來控制方向盤、油門和剎車,從而保證無人駕駛汽車沿著預定道路安全行駛。
無人駕駛的發展現狀
目前來看,Level 1和Level 2級的自動駕駛得到了廣泛的商業化應用,比如上文中提到的定速巡航、自適應巡航等。少數汽車制造業巨頭宣稱已經開始量產Level 3級的自動駕駛汽車(如奧迪新款A8),但大部分廠商還在緊鑼密鼓地朝著這個方向邁進。谷歌和百度等互聯網公司則正加緊Level 4級無人駕駛汽車的研制和商業化推進,但目前來看還主要處于測試階段。無論如何,未來將是個人車合一的世界,人和車之間的“肢體”接觸會越來越少,“思想”溝通會越來越多。在未來,你想要去某地,你只需動動嘴,不再需要動手!
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
