基于衛(wèi)星導(dǎo)航的時(shí)間位置標(biāo)定儀器研究
2019-09-10 07:22:44劉依楠左申正
現(xiàn)代信息科技 2019年19期
劉依楠 左申正


摘? 要:氣象雷達(dá)各個(gè)分系統(tǒng)工作運(yùn)行需要一個(gè)精準(zhǔn)的時(shí)間戳標(biāo)定,以便軟件后臺(tái)處理數(shù)據(jù),并且雷達(dá)系統(tǒng)每次運(yùn)行時(shí)都要對(duì)天線反射體進(jìn)行方位、仰角的標(biāo)定。本文結(jié)合實(shí)際的應(yīng)用場(chǎng)景,在傳統(tǒng)NTP網(wǎng)絡(luò)時(shí)間服務(wù)器的功能基礎(chǔ)上增加了位置信息的測(cè)量,設(shè)計(jì)了一種可以同時(shí)對(duì)方位、仰角、時(shí)間進(jìn)行標(biāo)定的儀器,該標(biāo)定儀器可以提高氣象雷達(dá)觀測(cè)數(shù)據(jù)的實(shí)時(shí)性和可靠性。
關(guān)鍵詞:衛(wèi)星導(dǎo)航;仰角;時(shí)間信息;雷達(dá)
中圖分類號(hào):TN967.1? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2019)19-0081-03
Abstract:Radar run each subsystem work requires a precise time stamp for calibration,In order to software processing data;and radar system run will be calibration the azimuth and angle of the antenna reflector. In this paper,on the basis of the function of the traditional NTP network time server to increase the measurement location information,combined with the actual application scenario design a calibration of the instrument for the azimuth,angle,time. The calibration instrument can improve the real-time performance and reliability of weather radar data.
Keywords:satellite navigation;elevation;time information;radar
0? 引? 言
氣象雷達(dá)系統(tǒng)分布的各個(gè)分系統(tǒng)、探測(cè)設(shè)備在獲取觀測(cè)資料時(shí),系統(tǒng)的時(shí)間信息不準(zhǔn)確可能導(dǎo)致觀測(cè)資料不可用,以及從觀測(cè)資料中獲取的預(yù)報(bào)產(chǎn)品不可信。依賴數(shù)據(jù)服務(wù)器、網(wǎng)關(guān)以及其它網(wǎng)絡(luò)設(shè)備的背后存在一個(gè)基本的信任:網(wǎng)絡(luò)里的計(jì)算機(jī)都有準(zhǔn)確的時(shí)間。
氣象雷達(dá)工作時(shí)都需要標(biāo)定天線方位仰角,目前依靠傳統(tǒng)的太陽(yáng)法,這種方法受太陽(yáng)本身在天空中位置的影響,測(cè)量時(shí)間不自由、局限性大、精度也得不到精確的保證;另外,測(cè)量出的位置信息的時(shí)間戳和雷達(dá)系統(tǒng)可能存在偏差,導(dǎo)致數(shù)據(jù)的可靠性降低。
本文以此為出發(fā)點(diǎn),為氣象雷達(dá)系統(tǒng)設(shè)計(jì)提供一個(gè)準(zhǔn)確的時(shí)間基準(zhǔn),使各個(gè)分布式的采集觀測(cè)站有統(tǒng)一的時(shí)間標(biāo)準(zhǔn),提高觀測(cè)資料的時(shí)間戳的可靠性,為每個(gè)探測(cè)設(shè)備提供一個(gè)第三方時(shí)間基準(zhǔn)源,這樣就可以保證整個(gè)觀測(cè)網(wǎng)中的設(shè)備觀測(cè)時(shí)間統(tǒng)一,并且通過(guò)衛(wèi)星定位獲取對(duì)應(yīng)時(shí)間的高精度位置信息。
1? 工作原理
目前標(biāo)定系統(tǒng)時(shí)間戳的通用方法基本采用NTP網(wǎng)絡(luò)時(shí)間服務(wù)器,市面上的NTP網(wǎng)絡(luò)時(shí)間服務(wù)器基本都是采用單測(cè)量站的方式接收GPS系統(tǒng)中各個(gè)衛(wèi)星的原子鐘頻(也可以根據(jù)不同的要求選擇其他衛(wèi)星授時(shí)系統(tǒng),例如北斗、GLONASS、伽利略作為時(shí)間的基準(zhǔn)源),設(shè)備由高精度衛(wèi)星接收機(jī)、高可靠性工業(yè)級(jí)信號(hào)處理主板、高亮度LED顯示屏和工業(yè)機(jī)箱等部件組成,采用高效的嵌入式Linux操作系統(tǒng)。
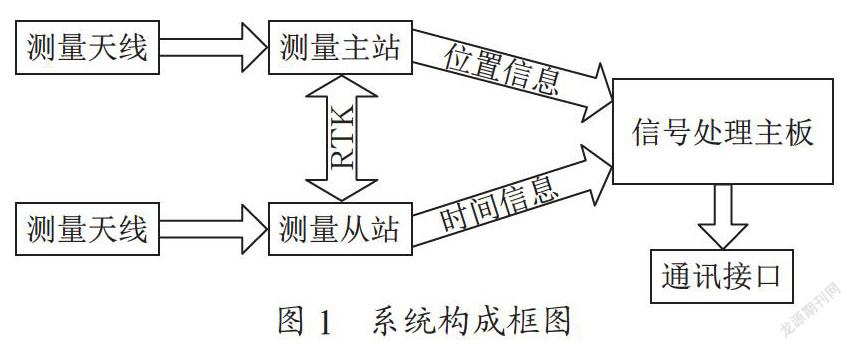
由于本文的設(shè)計(jì)背景是應(yīng)用于氣象雷達(dá)系統(tǒng),在對(duì)各分系統(tǒng)進(jìn)行時(shí)間標(biāo)定的同時(shí),還需要為雷達(dá)系統(tǒng)提供相應(yīng)時(shí)次的可靠方位仰角位置信息,故本文在傳統(tǒng)NTP網(wǎng)絡(luò)時(shí)間服務(wù)器的基礎(chǔ)上進(jìn)行升級(jí),采用雙測(cè)量站(主站、從站)和兩個(gè)高精度大地測(cè)量型天線,主站的位置信息作為基準(zhǔn),標(biāo)定從站的位置信息,進(jìn)行RTK處理,最終將高可靠性的位置信息傳輸?shù)叫盘?hào)處理主板,并且由從站獲取衛(wèi)星系統(tǒng)的原子鐘頻,向信號(hào)處理主板發(fā)送高精度的UTC時(shí)間。
2? 系統(tǒng)設(shè)計(jì)
本文設(shè)計(jì)的系統(tǒng)主要由高精度大地測(cè)量天線、高精度測(cè)量站和信號(hào)處理主板構(gòu)成,系統(tǒng)構(gòu)成框圖如圖1所示。
2.1? 高精度大地測(cè)量天線
測(cè)量天線是本系統(tǒng)處理衛(wèi)星信號(hào)的首個(gè)器件,它將接收到的衛(wèi)星所發(fā)射的電磁波信號(hào)轉(zhuǎn)變成電壓或電流信號(hào),以供測(cè)量站攝取與處理。因?yàn)橄到y(tǒng)賴以定位的信息基本全部來(lái)自于天線接收到的衛(wèi)星信號(hào),所以接收天線的性能直接影響整個(gè)系統(tǒng)的定位性能,它對(duì)系統(tǒng)整體所起的作用和貢獻(xiàn)絕對(duì)不容忽視。
測(cè)量天線部分完成射頻信號(hào)的接收,即把衛(wèi)星播發(fā)的電磁波轉(zhuǎn)換成便于處理的電信號(hào)。具有優(yōu)良指標(biāo)的天線在提高整機(jī)的接收靈敏度、減小地形、地貌以及環(huán)境因素對(duì)設(shè)備的影響等方面有非常重要的作用。在天線單元的選擇中,除保證寬波束、高增益和寬軸比帶寬外,天線單元在整個(gè)波束帶寬內(nèi)還應(yīng)該提供均勻的幅度響應(yīng)和均勻的相位響應(yīng)。
外置測(cè)量天線選擇的是集GPS L1&L2,BDS B1&B2 &B3和GLONASS G1&G2三星七頻測(cè)量天線,可廣泛應(yīng)用于大地測(cè)量、橋梁施工、海洋測(cè)量、水下地形測(cè)量等工作場(chǎng)景。該天線采用多饋點(diǎn)設(shè)計(jì),保證天線相位中心和幾何中心的重合,提高測(cè)量精度。內(nèi)置低噪聲放大模塊,采用前置及多級(jí)濾波器濾除干擾信號(hào),保證在惡劣電磁環(huán)境下正常工作。具有高增益、低噪聲、體積小巧、重量輕等優(yōu)點(diǎn)。
2.2? 高精度測(cè)量站
由于本文設(shè)計(jì)的應(yīng)用背景是為氣象雷達(dá)系統(tǒng)提供方位仰角位置信息和時(shí)間基準(zhǔn),所以需要采用兩個(gè)高精度測(cè)量站,一個(gè)主站,一個(gè)從站,主站的位置信息作為基準(zhǔn)標(biāo)定從站的位置信息,二者進(jìn)行RTK處理,最終得到具有高可靠性、高穩(wěn)定性的位置信息數(shù)據(jù),并且通過(guò)測(cè)量從站獲取高精度的UTC時(shí)間。本設(shè)計(jì)選擇的測(cè)量站的時(shí)間精度為20nS、測(cè)量位置精度水平方向2cm、垂直方向5cm。
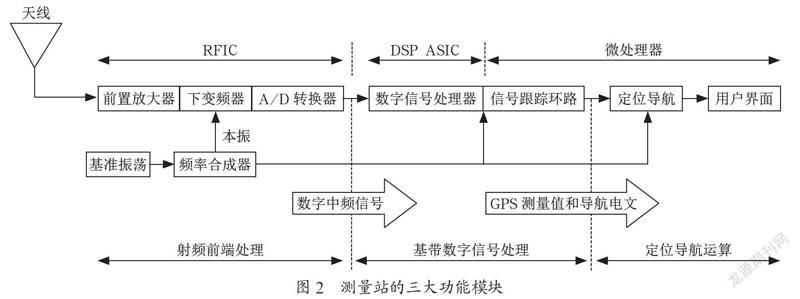
測(cè)量站由射頻器(RF)、信號(hào)通道(基帶)、數(shù)據(jù)處理器(CPU)組成。其任務(wù)是對(duì)天線饋送來(lái)的微弱信號(hào)進(jìn)行放大、濾波、下變頻,最終輸出較低的中頻信號(hào)并經(jīng)過(guò)ADC轉(zhuǎn)換成數(shù)字中頻,通過(guò)信號(hào)通道完成信號(hào)捕獲、跟蹤、解擴(kuò)、解調(diào)及偽距測(cè)量、載波相位測(cè)量,最終送到CPU對(duì)觀測(cè)數(shù)據(jù)進(jìn)行處理,結(jié)算出定位結(jié)果、時(shí)間信息和物體運(yùn)動(dòng)速度等。
射頻前端處理模塊通過(guò)天線接收所有可見衛(wèi)星的信號(hào),經(jīng)前置濾波器和前置放大器的濾波放大后,再與本機(jī)振蕩器產(chǎn)生的正弦波本振信號(hào)進(jìn)行混頻而下變頻成中頻(IF)信號(hào),最后經(jīng)模數(shù)(A/D)轉(zhuǎn)換器將中頻信號(hào)轉(zhuǎn)變成離散時(shí)間的數(shù)字中頻信號(hào)。
基帶數(shù)字信號(hào)處理模塊通過(guò)處理射頻前端輸出的數(shù)字中頻信號(hào),復(fù)制出與接收機(jī)的衛(wèi)星信號(hào)相一致的本地載波和本地偽距信號(hào),從而實(shí)現(xiàn)對(duì)信號(hào)的捕獲與跟蹤,并且從中獲得偽距和載波相位等測(cè)量值,解調(diào)出導(dǎo)航電文。
在基帶數(shù)字信號(hào)處理模塊處理完數(shù)字中頻信號(hào)后,各個(gè)通道分別輸出其所跟蹤的衛(wèi)星信號(hào)的偽距、多普勒頻移和載波相位等測(cè)量值以及信號(hào)上解調(diào)出來(lái)的導(dǎo)航電文,而這些衛(wèi)星測(cè)量值和導(dǎo)航電文中的星歷參數(shù)等信息再經(jīng)過(guò)后續(xù)的定位導(dǎo)航運(yùn)算功能模塊的處理,接收機(jī)最終獲得定位結(jié)果,或者再輸出各種導(dǎo)航信息。
測(cè)量站的三大功能模塊如圖2所示。
2.3? 信號(hào)處理主板
信號(hào)處理主板采用Linux2.6內(nèi)核,內(nèi)建Web服務(wù)器和FTP服務(wù)器,用于接收、瀏覽和顯示跟蹤到的導(dǎo)航衛(wèi)星,圖形化的人機(jī)交互界面用于請(qǐng)求產(chǎn)品、顯示分析和運(yùn)行參數(shù)設(shè)置,接收實(shí)時(shí)觀測(cè)量,解算數(shù)據(jù),轉(zhuǎn)換成指定的數(shù)據(jù)格式,并定時(shí)打包數(shù)據(jù)上傳到指定的FTP服務(wù)器。這一部分是整個(gè)系統(tǒng)的實(shí)時(shí)數(shù)據(jù)處理部分,采用的技術(shù)方案是使用嵌入式技術(shù)來(lái)實(shí)現(xiàn)數(shù)據(jù)接收、解析、打包上傳等。最終通過(guò)RJ45網(wǎng)絡(luò)接口為雷達(dá)系統(tǒng)授時(shí)和標(biāo)定方位仰角。
3? 系統(tǒng)測(cè)試
選擇公司風(fēng)廓線雷達(dá)配合系統(tǒng)測(cè)試,架設(shè)好天線,并確保模塊供電正常之后,軟件每秒鐘從模塊獲取經(jīng)緯度、方向和時(shí)間信息,同時(shí)每?jī)擅霃V播此信息給風(fēng)廓線工作軟件。我們通過(guò)分析記錄在文件中的這些信息,對(duì)系統(tǒng)進(jìn)行評(píng)估。
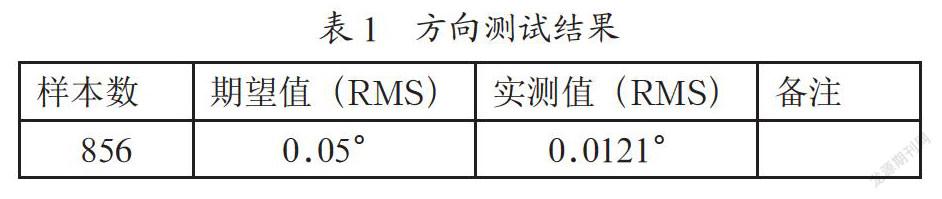
方向測(cè)試說(shuō)明:風(fēng)廓線雷達(dá)波束指向精度為0.5°,所以這里的期望值比其指向精度高一個(gè)數(shù)量級(jí)。結(jié)果如表1所示。
經(jīng)度測(cè)試說(shuō)明:沿赤道,1°經(jīng)度差對(duì)應(yīng)的距離在所有緯度中最大。0.0001°的誤差表征11.13米左右的距離誤差(赤道周長(zhǎng)取40075704米)。
此誤差小于移動(dòng)風(fēng)廓線雷達(dá)盲區(qū)覆蓋半徑(28米)。結(jié)果如表2所示。
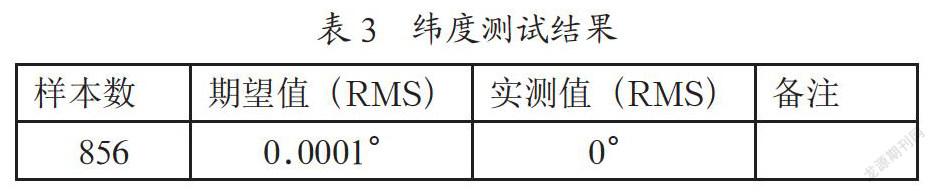
緯度測(cè)試說(shuō)明:0.0001°的緯度誤差表征11.11米左右的距離誤差(子午線周長(zhǎng)取40008548米)。
此誤差小于移動(dòng)風(fēng)廓線雷達(dá)盲區(qū)覆蓋半徑(28米)。結(jié)果如表3所示。
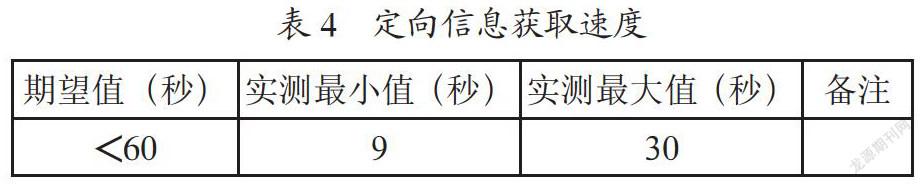
定向信息獲取速度(從模塊上電開始計(jì)時(shí)),如表4所示。
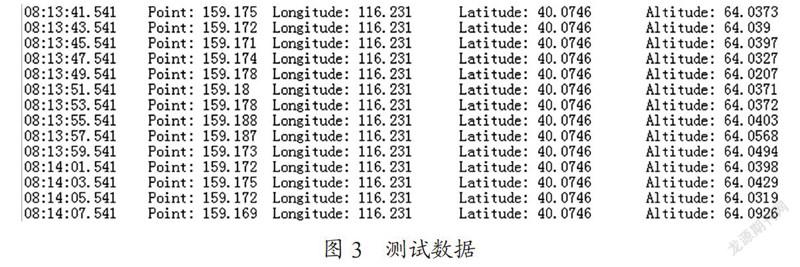
原始測(cè)試數(shù)據(jù)格式:
由于篇幅原因,截取部分測(cè)試數(shù)據(jù),如圖3所示。
4? 結(jié)? 論
在氣象雷達(dá)系統(tǒng)的應(yīng)用背景下,本文在傳統(tǒng)NTP網(wǎng)絡(luò)時(shí)間服務(wù)器的基礎(chǔ)上增加了測(cè)量方位仰角的功能,并已應(yīng)用于公司的相關(guān)雷達(dá)產(chǎn)品中,目前獲取的觀測(cè)數(shù)據(jù)相對(duì)穩(wěn)定、可靠,實(shí)現(xiàn)了氣象雷達(dá)系統(tǒng)整個(gè)觀測(cè)網(wǎng)中的設(shè)備觀測(cè)時(shí)間統(tǒng)一,并且通過(guò)衛(wèi)星定位獲取對(duì)應(yīng)時(shí)間的高精度位置信息。
參考文獻(xiàn):
[1] 丁金才.GPS氣象學(xué)及應(yīng)用 [M].北京:氣象出版社,2009.
[2] 趙科佳,張愛敏,寧大愚.基于NTP協(xié)議的網(wǎng)絡(luò)時(shí)間服務(wù)系統(tǒng)的實(shí)現(xiàn) [J].電子測(cè)試,2008(7):13-16.
作者簡(jiǎn)介:劉依楠(1987.06-),男,漢族,北京人,中級(jí)工程師,碩士研究生,研究方向:電路與系統(tǒng)方向。
