異步電機四象限驅動系統的線性自抗擾與滑模控制
2019-09-10 07:22:44張暉鵬于海生劉旭東吳賀榮
青島大學學報(工程技術版) 2019年2期
張暉鵬 于海生 劉旭東 吳賀榮


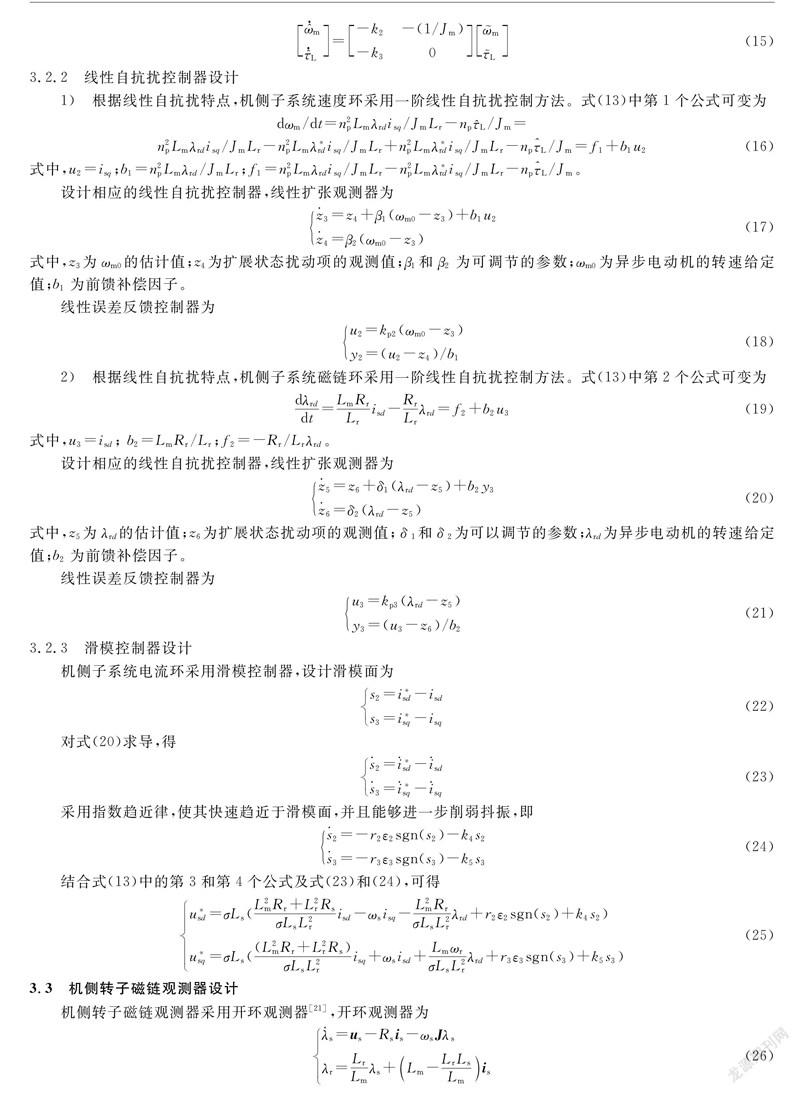
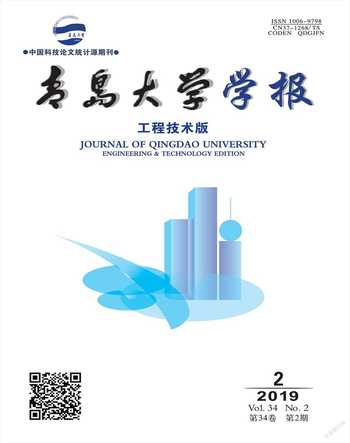
摘要:? 為了實現背靠背變流器和異步電機驅動系統的四象限運行、能量雙向流動、網側單位功率因數、直流母線電壓可控,本文采用線性自抗擾控制和滑模控制相結合的控制策略。網側變流器電壓環采用線性自抗擾控制,電流環采用滑模控制,提升了網側子系統的抗干擾能力;機側變流器速度環及磁鏈環采用線性自抗擾控制,電流環采用滑模控制,保證了網側子系統的直流母線電壓恒定時再進行機側子系統的起動。異步電機四象限運行開始時存在較大電壓超調的問題,采用網側子系統電壓軟給定方法,減小電壓超調。對于負載轉矩未知的情況,采用負載轉矩觀測器進行觀測。仿真結果表明,該控制系統實現了異步電機的四象限運行,對異步電機的未知負載轉矩值跟蹤快速且精確,實現了異步電機四象限驅動系統在單位功率因數下運行,線性自抗擾與滑模控制能很好地保證網側直流電壓達到給定值,并保持恒定,雖然在電機狀態切換時,直流母線電壓有波動,但很快恢復到給定值,電壓定向控制存在一定的穩態誤差,且誤差隨電機狀態的切換越來越大。該研究在工業傳動領域具有廣闊的應用前景。
關鍵詞:? 異步電機; 四象限; 滑模控制; 線性自抗擾控制; 電壓軟給定
中圖分類號: TP273+.2; TM343 文獻標識碼: A
隨著電力電子技術的發展,背靠背變流器作為異步電機的主控電路,在工業傳動領域得到快速發展[12]。傳統的異步電機驅動系統,網側由不可控變流器組成,存在著直流母線電壓不可控、能量不能進行雙向流動、運行時功率因數較低的缺點。異步電機四象限驅動系統具有四象限運行、能量可以雙向流動并能夠在網側單位功率因數運行的優勢[3]。近年來,異步電機四象限驅動系統在國內外得到快速發展,在列車運行時,采用大功率四象限變流器將再生能量送到中壓交流電網上,具有良好的節能效果[45]。在礦井提升機、熱源廠汽輪機、離心機等系統中,傳統的電機二象限運行既增加了運行成本,又消耗了能量,采用電機四象限驅動系統,實現了電能的綠色變換[67]。異步電機四象限驅動系統存在著非線性、強耦合、多變量的特性,傳統的控制方法很難實現良好的控制性能[810]。目前國內外學者在該領域采用了許多新型的控制方法。Zheng P等人[1112]提出了基于電網電壓導向控制,增強了異步電機驅動四象限系統動態性能,四象限驅動系統提取有功功率,并通過采用有源前端轉換器將其發送回電網,提高了網側的功率因數;宋曉陽等人[1314]采用模糊自適應控制方法,提高了轉速跟蹤性能,但結構復雜,在實際應用中很難實現;Shao M L等人[15]提出了單神經元和反步控制相結合的控制策略,提高了電流跟蹤能力,但直流母線電壓存在超調;韓京清[16]提出了自抗擾控制方法,且線性自抗擾技術具有結構簡單、參數易于調節的優點。雖然滑模控制具有較強的抗干擾性,但在網側子系統剛啟動時存在電壓超調的問題。因此,本文采用直流側電壓軟給定方法,抑制較大的電壓超調,保證系統的正常運行。在實際運行中,針對負載轉矩未知的問題,設計負載轉矩觀測器,并采用線性自抗擾和滑模相結合的控制方法,實現直流母線電壓可控、異步電機四象限運行的能量雙向流動及單位功率因數下運行,將本文所提出的控制方法與網側子系統采用電壓定向控制、機側子系統采用磁場定向控制進行比較研究。仿真結果驗證了所設計的控制策略具有良好的性能。
1 系統的整體方案設計
基于背靠背變流器的異步電機四象限驅動系統,主要由網側子系統和機側子系統兩部分組成,系統控制原理圖如圖1所示。
2 網側子系統的數學模型與控制
網側子系統采用線性自抗擾和滑模相結合的控制策略。控制目標是保證網側單位功率因數運行,即i*gq=0,直流母線電壓可控,能量實現雙向流動。
2.1 網側子系統的數學模型與控制
2.2 網側子系統控制器設計
2.2.1 線性自抗擾控制器設計
網側子系統電壓環采用線性自抗擾控制器。線性自抗擾由擴張狀態觀測器、線性誤差反饋控制器和微分跟蹤器3部分組成[18]。采用一階線性自抗擾控制方法,狀態觀測器環節中沒有微分輸出,因此不需要微分跟蹤環節的微分輸出,所以在一階系統中可以忽略微分跟蹤器。假設網側整流橋的橋路沒有損耗,依據能量守恒,系統交流側的功率等于直流側的功率。按照等量坐標進行變換,則
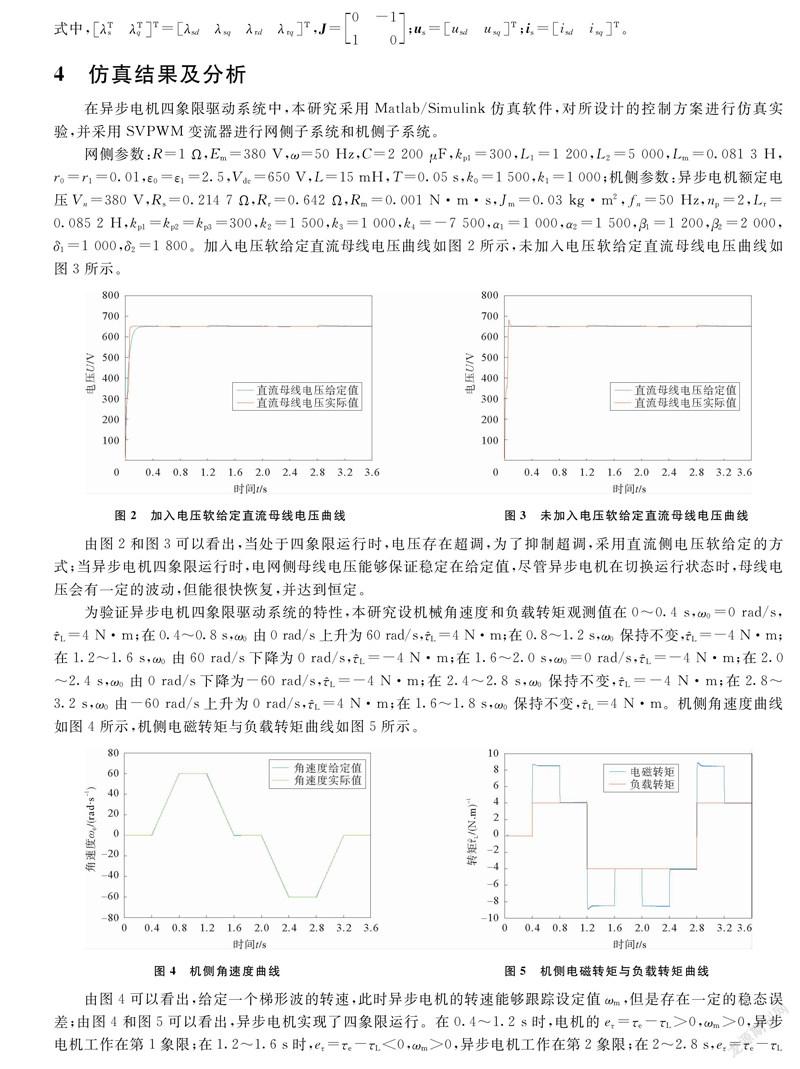
由圖6可以看出,負載轉矩觀測器對異步電機的未知負載轉矩值跟蹤快速且精確;由圖7可以看出,在系統運行過程中,網側的q軸電流分量igq接近于0,即網側的無功功率為0,網側的d軸電流分量igd為正,因此實現了異步電機四象限驅動系統在單位功率因數下運行。
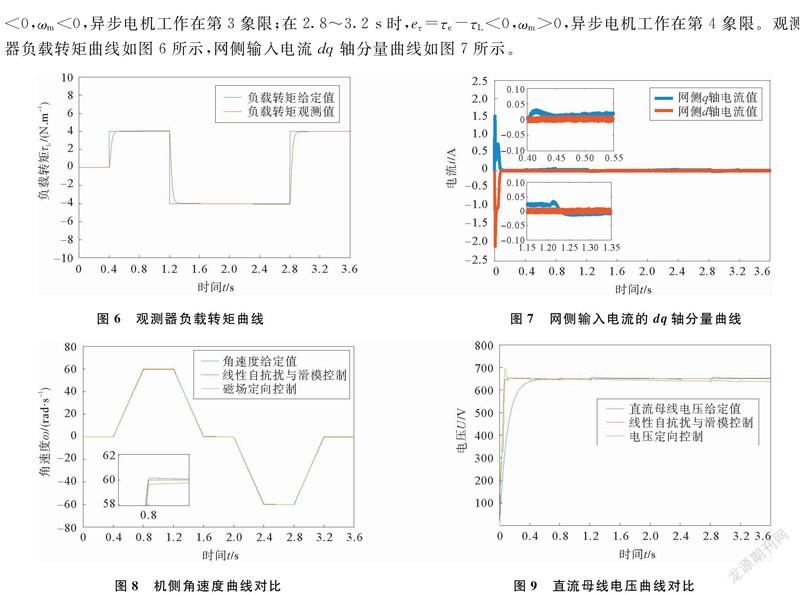
將異步電機四象限驅動系統線性自抗擾與滑模控制相結合的控制方法,與網側子系統采用電壓定向控制、機側子系統采用磁場定向控制進行對比。機側角速度曲線對比如圖8所示,直流母線電壓曲線對比如圖9所示。
由圖8可以看出,當異步電機驅動系統運行時,線性自抗擾與滑模控制能快速跟蹤角速度的給定值,磁場定向控制跟蹤速度與精度性較差;由圖9可以看出,當異步電機驅動系統運行時,線性自抗擾與滑模控制能很好地保證網側直流電壓達到給定值,并保持恒定,雖然在電機狀態切換時,直流母線電壓有波動,但很快恢復到給定值。電壓定向控制存在一定的穩態誤差,且誤差隨電機狀態的切換越來越大。
5 結束語
本文主要對基于背靠背變流器的異步電機四象限驅動系統進行研究。采用線性自抗擾控制和滑模控制相結合的方法,實現了四象限運行、直流母線電壓可控、能量雙向流動、網側單位功率因數的預期目標;網側子系統采用電壓軟給定線性自抗擾控制和滑模控制相結合的控制方法,提高了動態、穩態性能和抗干擾能力。機側子系統采用了線性自抗擾控制和滑模控制相結合的控制方法,提高了對異步電機轉速的快速跟蹤能力;采用電壓軟給定的方法,解決了網側電壓出現較大超調的問題;采用負載轉矩觀測器,實現了對未知負載的快速跟蹤和觀測。將本文采用的方法與網側子系統采用電壓定向控制、機側子系統采用磁場定向控制進行比較。仿真結果證明本文設計的控制策略具有良好的性能。該研究具有廣闊的應用前景。
參考文獻:
[1] Zhou D H, Zhao J, Liu Y. Finitecontrolset model predictive control scheme of threephase fourleg backtoback converterfed induction motor drive[J]. IET Electric Power Applications, 2017, 11(5): 761767.
[2] Elfadili A. Adaptive nonlinear control of induction motors through AC/DC/AC converters[J]. Asian Journal of Control, 2012, 14(6): 14701483.
[3] Heising C, Bartelt R, Oettmeier M, et al. Analysis of singlephase 50kW 16.7Hz PIcontrolled fourquadrant lineside converter under different grid characteristics[J]. IEEE Transactions on Industrial Electronics, 2010, 57(2): 523531.
[4] Marinkov S, Jager B D. Fourquadrant control of 4/2 switched reluctance machines[J]. IEEE Transactions on Industrial Electronics, 2016, 63(12): 73937403.
[5] Restrepo M, Canizares C, Kazerani M. Threestage distribution feeder control considering fourquadrant EV chargers[J]. IEEE Transactions on Smart Grid, 2016, 9(4): 3736 ?3747.
[6] Fan Y X, Yan G, Zou H Q, et al. Development of realtime simulation application software for fourquadrant converter system based on MATLAB[J]. International Journal of Software Engineering & Knowledge Engineering, 2018, 28(4): 523535.
[7] Magri A E, Giri F, Abouloifa A, et al. Robust control of synchronous motor through AC/DC/AC converters[J]. Control Engineering Practice, 2010, 18(5): 540553.
[8] Zhong Q C. AC Ward Leonard drive systems: Revisiting the fourquadrant operation of AC machines[J]. European Journal of Control, 2013, 19(5): 426435.
[9] Benchabane F, Bennis O, Yahia K, et al. Direct field oriented control scheme for space vector modulated AC/DC/AC converter fed induction motor[J]. Frontiers in Energy, 2012, 6(2): 129137.
[10] Hossain S, Husain I, Klode H, et al. Four quadrant and zero speed sensorless control of a switched reluctance motor[J]. IEEE? Industry Applications Society, 2003, 39(5): 16411646.
[11] Zheng P, Liu R R, Wu Q, et al. Magnetic coupling analysis of fourquadrant transducer used for hybrid electric vehicles[J]. IEEE Transactions on Magnetics, 2007, 43(6): 25972599.
[12] Arias A, Ortega C, Zaragoza J, et al. Hybrid sensorless permanent magnet synchronous machine four quadrant drive based on direct matrix converter[J]. International Journal of Electrical Power & Energy Systems, 2013, 45(1): 7886.
[13] 郭磊磊, 金楠, 韓東洋. 背靠背永磁直驅風電變流器共模電壓抑制方法[J]. 電機與控制學報, 2018, 22(6): 8190.
[14] Dida A, Benattous D. Modeling and control of DFIG through backtoback five levels converters based on neurofuzzy controller[J]. Journal of Control Automation & Electrical Systems, 2015, 26(5): 506520.
[15] Shao M L, Yu H S, Yu J P, et al. Four quadrant PMSM drive system via single neuron adaptive control and backstepping[J]. ICIC Express Letters, 2016, 10(2): 433438.
[16] 韓京清. 自抗擾控制技術[M]. 北京: 國防工業出版社, 2008.
[17] Dannehl J, Wessels C, Fuchs F W. Limitations of voltageoriented PI current control of gridconnected PWM rectifiers with, filters[J]. IEEE Transactions on Industrial Electronics, 2009, 56(2): 380388.
[18] 曾岳南, 鄭雷, 周斌, 等. 線性自抗擾控制技術在PWM整流器中的應用[J]. 電力電子技術, 2016, 50(8): 1315.
[19] 李永東. 交流電機數字控制系統 [M]. 2版. 北京: 機械工業出版社, 2012.
[20] 劉剛, 陳濤, 嚴干貴. 背靠背四象限變流器的控制系統設計[J]. 電力電子技術, 2007, 41(11): 13.
[21] Yu H, Yu J, Liu J, et al. Nonlinear control of induction motors based on state error PCH and energyshaping principle[J]. Nonlinear Dynamics, 2013, 72(1/2): 4959.