基于STM32單片機(jī)的麥克納姆輪小車設(shè)計
2019-09-10 19:57:26孫全勝
現(xiàn)代信息科技 2019年22期

摘? 要:本文設(shè)計了一款基于STM32單片機(jī)的四輪驅(qū)動智能小車,能夠準(zhǔn)確地實現(xiàn)尋跡避障功能。小車以單片機(jī)為控制核心,外接穩(wěn)壓電源模塊、超聲波傳感模塊、電機(jī)驅(qū)動模塊。采用超聲波傳感器作為小車的傳感器模塊來識別路面和障礙物信息;采用BTN7971驅(qū)動芯片控制驅(qū)動模塊,并不再使用傳統(tǒng)小車的普通驅(qū)動輪,使用麥克納姆輪作為小車驅(qū)動輪。使本設(shè)計中的小車可以原地旋轉(zhuǎn)、左右平移,更加適應(yīng)復(fù)雜環(huán)境,能夠快速、穩(wěn)定地實現(xiàn)精準(zhǔn)避障。所設(shè)計的智能小車結(jié)構(gòu)簡單,容易實現(xiàn)。
關(guān)鍵詞:STM32單片機(jī);智能小車;麥克納姆輪;超聲波避障
中圖分類號:TP242? ? ? 文獻(xiàn)標(biāo)識碼:A 文章編號:2096-4706(2019)22-0174-03
Abstract:This design is based on STM32 single-chip microcomputer four-wheel drive intelligent car,can accurately achieve the track and obstacle avoidance function. The car takes microcontroller as the control core,and is externally connected with stable voltage power module,ultrasonic sensing module and motor driving module. Ultrasonic sensor is used as the sensor module of the car to identify road and obstacle information. BTN7971 driver chip is adopted to control the driver module,and the conventional car's ordinary drive wheel is no longer used,Mecanum wheel is used as the car's drive wheel. The car in this design can rotate in place and shift around,which is more suitable for complex environment and can achieve accurate obstacle avoidance in a fast and stable way. The intelligent car is simple in structure and easy to realize.
Keywords:STM32 microcontroller;intelligent car;Mecanum wheel;ultrasonic obstacle avoidance
0? 引? 言
當(dāng)下科技的發(fā)展迅速,智能小車發(fā)展飛快,智能小車也作為機(jī)器人行業(yè)的典型代表,在汽車、機(jī)械生產(chǎn)、以及物流運(yùn)輸行業(yè)里起到重要作用。本文所設(shè)計的四輪驅(qū)動智能車對以往的普通驅(qū)動輪做出了改進(jìn),全部使用了麥克納姆輪,可以實現(xiàn)在運(yùn)輸過程中遇到障礙物時能夠全方位地移動,從而快速有效地實現(xiàn)避障。包括在很多道路復(fù)雜、障礙物多的情況下也可以憑借全方位移動來自動實現(xiàn)避障功能。如今常見的智能小車分為紅外線避障和超聲波避障。紅外線傳感器有很多局限性,如不可測量距離、容易受到灰塵和強(qiáng)光的干擾;而超聲波傳感器可以測量距離,受溫度和光線影響小,比較穩(wěn)定,從而可大幅度增強(qiáng)其用于社會生產(chǎn)的能力。
1? 智能小車結(jié)構(gòu)的設(shè)計
麥克納姆輪滾輪可以像傳統(tǒng)的車輪一樣前進(jìn)后退,也可以實現(xiàn)橫行、斜行、旋轉(zhuǎn)及其組合的運(yùn)動方式。當(dāng)在工作運(yùn)輸環(huán)境十分狹窄的情況下,就能提供多種解決方案,從而實現(xiàn)運(yùn)輸工作。
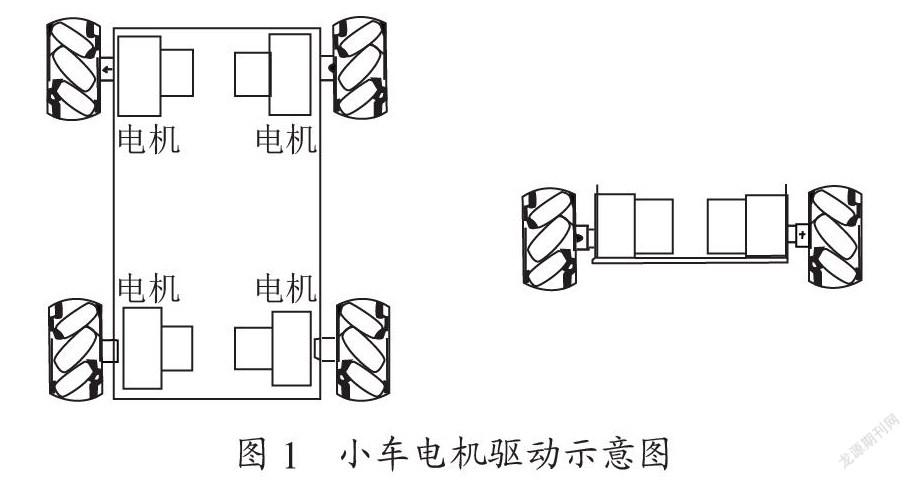
本文所設(shè)計的四輪驅(qū)動小車由四個電機(jī)分別控制四個輪子,減少了每一個驅(qū)動輪的負(fù)擔(dān),相對于傳統(tǒng)的后輪驅(qū)動小車,四輪驅(qū)動保證小車有足夠的驅(qū)動力,同時輪子使用的是麥克納姆輪。小車由STM32F103RC為核心驅(qū)動,由電源模塊、超聲波感應(yīng)器模塊、電機(jī)驅(qū)動模塊組成。如圖1所示為小車電機(jī)驅(qū)動模塊的大體結(jié)構(gòu)圖。
2? 硬件模塊設(shè)計
2.1? 智能小車的電源模塊
采用12V可充電鋰電池供電,電機(jī)驅(qū)動模塊直接由鋰電池提供12V的電壓,電源模塊使用的是XL2596穩(wěn)壓芯片,通過XL2596芯片穩(wěn)壓處理后輸出5V電壓提供給STM32單片機(jī),能夠輸出穩(wěn)定電壓以保證電源模塊正常有效工作。這樣即使電機(jī)驅(qū)動模塊和控制系統(tǒng)不分開供電,也能實現(xiàn)控制系統(tǒng)的穩(wěn)定工作,減輕小車在電源上的承重壓力,為小車提供更大的驅(qū)動力。
2.2? 智能小車的超聲波測距模塊設(shè)計
超聲波測距原理:由單片機(jī)接超聲波探頭后IO口TRIG(控制口)觸發(fā)開始測距,能提供不低于10us的高電平信號,再通過超聲波模塊發(fā)送出8個40kHz的方波,自主檢測是否存在信號返回,如果有信號返回,通過IO口ECHO(接受口)輸出高電平,同時定時器打開,當(dāng)IO口ECHO再次輸出低電平時,定時器關(guān)閉,記錄定時時間t,就是超聲波從發(fā)射開始到返回結(jié)束的時間。
所測距離=聲速(340m/s)*t/2
利用超聲波測距可以大程度地避免光線、灰塵、煙霧對于信號接收的影響,同時超聲波模塊周期性發(fā)送信號測距,可準(zhǔn)確地將路面實時數(shù)據(jù)傳輸給單片機(jī)處理,使小車驅(qū)動輪做出相應(yīng)的反應(yīng)。
2.3? 智能小車的電機(jī)驅(qū)動模塊
本設(shè)計所述智能車要想穩(wěn)定運(yùn)行,不僅要在電源模塊上做出改變,在電機(jī)驅(qū)動方面也要有所不同。采用麥克納姆輪,質(zhì)量較大、行駛平穩(wěn)、可以左右平移、原地旋轉(zhuǎn),比傳統(tǒng)小車更靈敏自由。采用直流減速電機(jī)驅(qū)動,使用12V寬電壓輸入電機(jī),通電后電機(jī)轉(zhuǎn)速可達(dá)1600r/min,小車空載時轉(zhuǎn)速可達(dá)600r/min,電機(jī)減速比為1:30,車輪半徑為30mm。
當(dāng)遇到障礙物時,超聲波傳感檢測將障礙物的數(shù)據(jù)分析處理后傳送給STM32單片機(jī),然后由STM32單片機(jī)依據(jù)所檢測到的各個數(shù)據(jù)對比標(biāo)準(zhǔn)數(shù)據(jù)的處理結(jié)果輸送給BTN7971驅(qū)動芯片,從而來控制電機(jī)驅(qū)動4個麥克納姆全向輪,使小車改變方向。
2.3.1? 麥克納姆輪的運(yùn)動原理
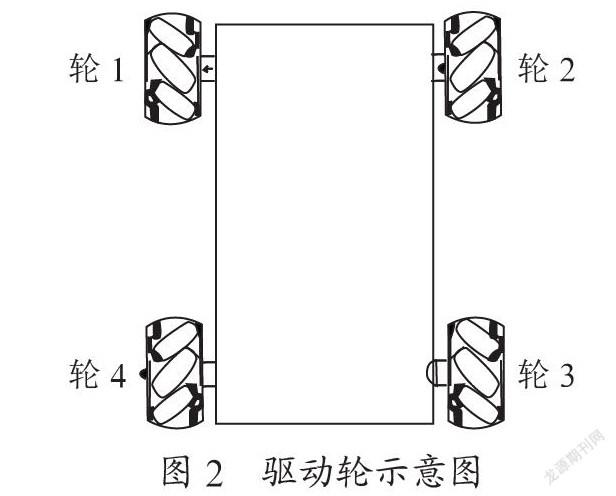
驅(qū)動輪示意圖如圖2所示。
當(dāng)四個驅(qū)動輪同時向前或向后運(yùn)動時,小車可實現(xiàn)向前或向后運(yùn)動;
當(dāng)輪1和輪3向前運(yùn)動,輪2和輪4不動時,小車可實現(xiàn)向左前方45°平移;
當(dāng)輪1和輪3向后運(yùn)動,輪2和輪4不動時,小車可實現(xiàn)向右后方45°平移;
當(dāng)輪2和輪4向前運(yùn)動,輪1和輪3不動時,小車可實現(xiàn)向右前方45°平移;
當(dāng)輪2和輪4向后運(yùn)動,輪1和輪3不動時,小車可實現(xiàn)向左后方45°平移;
當(dāng)輪1和輪3向前運(yùn)動,輪2和輪4向后運(yùn)動時,小車向左平移;
當(dāng)輪1和輪3向后運(yùn)動,輪2和輪4向前運(yùn)動時,小車向右平移;
當(dāng)輪1和輪4向前運(yùn)動,輪2和輪3向后運(yùn)動時,小車原地逆時針旋轉(zhuǎn);
當(dāng)輪1和輪4向后運(yùn)動,輪2和輪3向前運(yùn)動時,小車原地順時針旋轉(zhuǎn)。
通過單片機(jī)對四個電機(jī)的控制使得小車實現(xiàn)不同的操作。
2.3.2? 麥克納姆輪小車在特殊情況下的使用
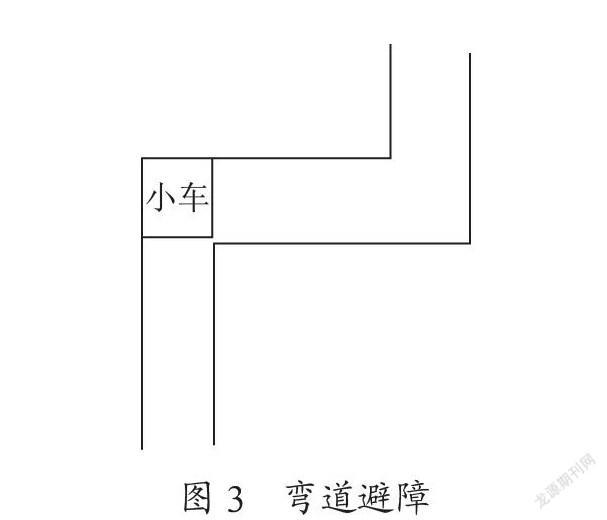
(1)當(dāng)小車行駛至如圖3情景下時,道路寬度微大于小車的長度,傳統(tǒng)的小車幾乎不可能實現(xiàn)轉(zhuǎn)彎,而麥克納姆輪小車就可以憑借自身優(yōu)勢直接向右平移。通過這種復(fù)雜路段。
(2)當(dāng)遇到圖4(a)中情景時,傳感器會先將四周的障礙距離數(shù)據(jù)輸送給單片機(jī),如圖4(b)所示,如果小車中心距側(cè)面距離L小于小車的對角線的一半S時,電機(jī)驅(qū)動模塊會調(diào)節(jié)驅(qū)動輪使小車平行向左移動,直到L大于S時,單片機(jī)會驅(qū)動小車原地逆時針旋轉(zhuǎn)90°,從而順利避開障礙物。
本文所設(shè)計的小車可以順利地解決在社會生產(chǎn)中所遇到的幾種特殊的運(yùn)輸情況,極大地提高生產(chǎn)效率。因為實際環(huán)境是復(fù)雜多變的,所以最終的運(yùn)動情況取決于控制算法和實際環(huán)境。
3? 小車的優(yōu)越性
本文所述麥克納姆輪小車的主要改進(jìn)點使在驅(qū)動輪上,完全舍棄傳統(tǒng)小車的驅(qū)動輪,使用四輪驅(qū)動的麥克納姆輪。優(yōu)點在于靈活的全方位移動、驅(qū)動力大、穩(wěn)定性強(qiáng)、操作所需環(huán)境比傳統(tǒng)小車小。傳統(tǒng)小車在面對狹窄的彎道時會出現(xiàn)無法轉(zhuǎn)彎的情況,本小車解決了這個問題;且本小車可以使用平移的方法通過復(fù)雜路段,大大減小了對小車長寬的要求;傳統(tǒng)小車在遇到急轉(zhuǎn)彎或者越過障礙物時車身不穩(wěn)定,本小車由于麥克納姆四輪驅(qū)動的特點,在遇到急轉(zhuǎn)彎和障礙物時比傳統(tǒng)小車多了很多特殊的轉(zhuǎn)彎和避障方法,大大提高了小車行駛的穩(wěn)定性,保證小車的正常行駛。
本文設(shè)計的小車也可以給社會提供便利,在社會生產(chǎn)和運(yùn)輸中通常會遇到很多復(fù)雜的路段環(huán)境,導(dǎo)致無法正常進(jìn)行生產(chǎn)運(yùn)輸,降低效率。而新型的麥克納姆輪車,便可以在一些復(fù)雜路段中比傳統(tǒng)輪車更加靈活,更容易適應(yīng)生產(chǎn)運(yùn)輸,提高社會生產(chǎn)力,所以在以后的社會生產(chǎn)中有很廣闊的應(yīng)用前景。
4? 結(jié)? 論
本設(shè)計為基于STM32的以麥克納姆輪為驅(qū)動輪的小車,小車可實現(xiàn)傳統(tǒng)小車不能實現(xiàn)的平移、旋轉(zhuǎn)動作;采用測距精確、抗干擾性強(qiáng)的超聲波傳感器,實現(xiàn)數(shù)據(jù)的精確傳輸;每個車輪都配備單獨的12V電機(jī)驅(qū)動,提供了較大的驅(qū)動輪。在本文列舉出的幾種特殊的傳統(tǒng)小車不容易快速實現(xiàn)避障功能的車道,所設(shè)計的麥克納姆輪小車可以通過幾個模塊間的配合自主實現(xiàn)精準(zhǔn)避障。雖然這種麥克納姆輪小車很多地方依然需要改進(jìn),但其結(jié)構(gòu)簡單,容易實現(xiàn),同時,在工業(yè)生產(chǎn)、社會生活、物流運(yùn)輸?shù)刃袠I(yè),都有很大的實用價值。
參考文獻(xiàn):
[1] 陳飛鵬.基于STC89C52單片機(jī)智能小車設(shè)計 [J].硅谷,2012(11):43-44.
[2] 柳智鑫.關(guān)于單片機(jī)的智能小車的設(shè)計與制作研究 [J].信息化建設(shè),2015(12):266.
[3] 張弘揚(yáng).基于單片機(jī)的智能小車裝置的設(shè)計 [J].科技風(fēng),2017(20):12.
[4] 張萍.超聲波避障智能小車的設(shè)計 [J].自動化儀表,2017,38(9):40-43.
[5] 祝松柏,李清宇.基于STC89C52的循跡避障智能小車的設(shè)計 [J].輕工科技,2018,34(3):65-66.
作者簡介:孫全勝(1999.11-),男,漢族,安徽鳳臺人,本科在讀,研究方向:電氣工程及其自動化。