AR標(biāo)識(shí)追蹤定位技術(shù)在室內(nèi)導(dǎo)航系統(tǒng)中的應(yīng)用
2019-09-09 09:35:14胡睿婷刁明光
智能城市 2019年16期
胡睿婷 刁明光*
(中國(guó)地質(zhì)大學(xué)( 北京) 信息工程學(xué)院,北京 100083)
隨著城市建設(shè)的發(fā)展,室內(nèi)建筑規(guī)模不斷擴(kuò)大,室內(nèi)結(jié)構(gòu)趨于復(fù)雜化,然而面向室內(nèi)的位置服務(wù)尚不滿足人們?cè)谑覂?nèi)公共空間的出行需求。現(xiàn)階段各類室內(nèi)電子地圖存在以下四方面問題:
(1) 傳統(tǒng)的二維地圖導(dǎo)航可讀性差,室內(nèi)空間方向辨識(shí)度低,使用者難以根據(jù)二維地圖準(zhǔn)確判定當(dāng)前位置與方向;
(2) 基于360街景技術(shù)的地圖導(dǎo)航雖然提升了真實(shí)感與代入感,但其制作與更新成本高,實(shí)景的可維護(hù)性差,操作復(fù)雜,無法實(shí)現(xiàn)以位置更新為驅(qū)動(dòng)的實(shí)景導(dǎo)航;
(3) 三維實(shí)景導(dǎo)航可以實(shí)現(xiàn)隨位置更新變化場(chǎng)景,但其三維模型數(shù)據(jù)量大,建模成本高,且仍然保留實(shí)景導(dǎo)航存在的問題;
(4) 室內(nèi)AR導(dǎo)航雖已經(jīng)面向市場(chǎng),但基于室內(nèi)無線定位技術(shù)的AR導(dǎo)航仍無法擺脫定位困難的缺陷。由于GPS信號(hào)在穿透建筑物或其他阻擋時(shí)信號(hào)強(qiáng)度被削弱,其定位精度不滿足室內(nèi)定位精度的標(biāo)準(zhǔn),一般不采用GPS方式進(jìn)行室內(nèi)定位;因此,現(xiàn)階段主要的室內(nèi)定位方式包含以下六種:Wi-Fi技術(shù),藍(lán)牙技術(shù),紅外線技術(shù),超寬帶技術(shù),RFID技術(shù)和超聲波技術(shù)。但對(duì)于移動(dòng)設(shè)備,Wi-Fi技術(shù),藍(lán)牙技術(shù),紅外線技術(shù)的信號(hào)接收端容易受到其他信號(hào)的干擾,從而影響其定位精度,定位器的能耗也較高,穩(wěn)定性差;而超寬帶技術(shù)、RFID技術(shù)和超聲波技術(shù)等雖然較前三種方法其定位精度更高,但由于特定硬件設(shè)備不便于整合到移動(dòng)設(shè)備中,同時(shí)還需要大量部署底層硬件設(shè)施,總體成本都較高。
因此,本文針對(duì)上述問題設(shè)計(jì)并實(shí)現(xiàn)了一種基于AR標(biāo)識(shí)追蹤技術(shù)的室內(nèi)導(dǎo)航系統(tǒng),彌補(bǔ)了二維地圖與實(shí)景地圖缺陷的同時(shí),避免使用現(xiàn)有無線定位技術(shù),提升了定位精度,降低了基礎(chǔ)設(shè)施鋪設(shè)成本,兼顧了導(dǎo)航的高效性和實(shí)用性。
1 系統(tǒng)設(shè)計(jì)
系統(tǒng)主要功能包括AR路徑導(dǎo)航、地圖場(chǎng)景切換和清除緩存。AR路徑導(dǎo)航功能可通過AR標(biāo)識(shí)追蹤技術(shù)確定起始位置,反饋實(shí)時(shí)位置,并引導(dǎo)最短路徑;場(chǎng)景切換用于初始化AR導(dǎo)航所在地圖;清除緩存功能用于整理用戶空間,有助于合理利用系統(tǒng)資源。其中AR路徑導(dǎo)航為本系統(tǒng)核心模塊。系統(tǒng)功能設(shè)計(jì)如圖1所示。
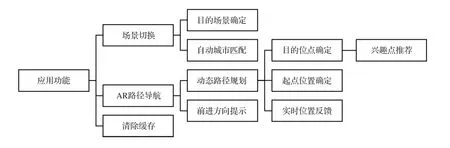
圖1 系統(tǒng)功能設(shè)計(jì)
1.1 AR模塊設(shè)計(jì)
AR模塊以Dijkstra路徑規(guī)劃結(jié)果為輸入,加載AR資源到緩存。導(dǎo)航過程中AR引擎持續(xù)從設(shè)備攝像機(jī)接收視頻幀,捕捉畫面中的自然特征點(diǎn)[1],再根據(jù)路徑規(guī)劃結(jié)果對(duì)圖像進(jìn)行重繪,從而達(dá)到在攝像機(jī)實(shí)景中放置3D引導(dǎo)模型的效果。AR模塊業(yè)務(wù)流程如圖2所示。

圖2 AR模塊業(yè)務(wù)流程
1.2 雙重定位的AR標(biāo)識(shí)結(jié)構(gòu)
雙重定位是指,每一個(gè)AR標(biāo)識(shí) (AR Tracker) 包含兩個(gè)弱標(biāo)記對(duì)象[1](以下簡(jiǎn)稱標(biāo)記),分別為NetRoad Tracker和Node Tracker。其中NetRoad Tracker用于快速定位視頻幀中的路網(wǎng)節(jié)點(diǎn)標(biāo)記,其元數(shù)據(jù)包括建筑物編號(hào)Building_ID和樓層編號(hào)Layer_ID,在導(dǎo)航過程中該標(biāo)記全局加載,同一建筑物的同一樓層使用同一個(gè)NetRoadTracker;Node Tracker用于定位路徑規(guī)劃結(jié)果節(jié)點(diǎn),其元數(shù)據(jù)包括該節(jié)點(diǎn)的實(shí)際地理位置X、Y以及唯一標(biāo)識(shí)該節(jié)點(diǎn)的Node_ID,當(dāng)且僅當(dāng)該節(jié)點(diǎn)屬于路徑規(guī)劃結(jié)果的子集及其相鄰節(jié)點(diǎn)時(shí)將該標(biāo)記被加載到緩存。采用雙重定位的AR標(biāo)識(shí)結(jié)構(gòu),可在緩存容量一定時(shí),減少資源的加載量與加載時(shí)間,同時(shí)保證系統(tǒng)可以實(shí)現(xiàn)規(guī)劃路徑節(jié)點(diǎn)與非規(guī)劃路徑節(jié)點(diǎn)的辨別。
1.3 AR追蹤定位
將AR標(biāo)識(shí)鋪設(shè)在室內(nèi)路網(wǎng)的相應(yīng)位置,組成可視的地理信息網(wǎng),通過追蹤AR標(biāo)識(shí)獲取當(dāng)前位置所包含的地理意義,從而實(shí)現(xiàn)室內(nèi)定位。追蹤定位流程如圖3所示,當(dāng)計(jì)算機(jī)捕捉到NetRoad Tracker時(shí),系統(tǒng)接收到標(biāo)識(shí)反饋的建筑物編號(hào)、樓層編號(hào)數(shù)據(jù),若同時(shí)捕捉到Node Tracker,則由Node_ID向系統(tǒng)上層查詢?cè)摴?jié)點(diǎn)的其他地理信息,若為規(guī)劃路徑節(jié)點(diǎn),則展現(xiàn)相應(yīng)引導(dǎo)模型;若已偏離規(guī)劃路徑,此時(shí)應(yīng)重新調(diào)起路徑規(guī)劃。

圖3 追蹤定位流程
1.4 AR資源緩存
根據(jù)建筑物的規(guī)模及其設(shè)計(jì)的復(fù)雜程度,其室內(nèi)路網(wǎng)節(jié)點(diǎn)數(shù)量在百到萬數(shù)量級(jí)之間,樓層間的節(jié)點(diǎn)數(shù)量也不一定相同,因此加載不同建筑,不同樓層的AR標(biāo)識(shí)資源所需要的時(shí)間與空間成本是動(dòng)態(tài)變化的。為了節(jié)約加載資源,采取靜態(tài)加載NetRoadTracker,動(dòng)態(tài)加載NodeTracker的方式,優(yōu)先緩存必要的AR標(biāo)識(shí)資源到緩存中,即先進(jìn)行路徑規(guī)劃,根據(jù)Dijkstra法路徑規(guī)劃的結(jié)果,緩存所有規(guī)劃路徑節(jié)點(diǎn)及部分相鄰節(jié)點(diǎn),舍棄剩余無關(guān)節(jié)點(diǎn)資源,保證系統(tǒng)可以辨別規(guī)劃路徑節(jié)點(diǎn)與非規(guī)劃路徑節(jié)點(diǎn)的同時(shí),提升系統(tǒng)性能和資源利用率。
2 系統(tǒng)實(shí)現(xiàn)
2.1 AR標(biāo)識(shí)鋪設(shè)
由于室內(nèi)空間有限,道路狹窄,而AR標(biāo)識(shí)的識(shí)別率與實(shí)際圖片大小呈正相關(guān),且考慮到節(jié)點(diǎn)的位置價(jià)值,AR標(biāo)識(shí)所代表的地理信息節(jié)點(diǎn)需要根據(jù)實(shí)際室內(nèi)環(huán)境合理、均勻地鋪設(shè)在可行走道路中軸線上。
2.2 AR方向引導(dǎo)
在獲取地理信息數(shù)據(jù)后,系統(tǒng)會(huì)根據(jù)當(dāng)前路徑規(guī)劃結(jié)果在地面鋪設(shè)的AR標(biāo)識(shí)圖形上生成3D引導(dǎo)模型,并輔以距離文字提示。
系統(tǒng)以MAXSTAR SDK為AR引擎開發(fā)工具測(cè)試導(dǎo)航效果。如圖4所示,3D引導(dǎo)模型箭頭所指方向即為當(dāng)前位置在路徑規(guī)劃結(jié)果中,指向下一目的位置的相對(duì)方向。在單次導(dǎo)航過程中,僅該次路徑規(guī)劃結(jié)果節(jié)點(diǎn)子集所覆蓋位置的AR標(biāo)識(shí)位置展示引導(dǎo)模型。

圖4 展示引導(dǎo)方向的AR模型
3 結(jié)語
本文研究并分析了現(xiàn)階段室內(nèi)導(dǎo)航所使用的技術(shù)及其缺陷,利用在自然環(huán)境下的弱標(biāo)記識(shí)別技術(shù)進(jìn)行室內(nèi)定位,并結(jié)合OpenGL2.0在視頻幀畫面中渲染3D引導(dǎo)模型,實(shí)現(xiàn)非無線定位的室內(nèi)AR導(dǎo)航。
未來將以豐富AR標(biāo)識(shí)模型、優(yōu)化海量資源緩存算法為研究方向,提升導(dǎo)航效率,擴(kuò)展應(yīng)用場(chǎng)景,持續(xù)推動(dòng)智能化出行的建設(shè)與發(fā)展。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
公民與法治(2020年11期)2020-07-25 02:02:06
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
