TCA2003測量機器人在隧道變形監測的應用
2019-09-09 06:45:42王常磊
智能城市 2019年17期
王常磊 熊 偉
(1. 安徽省第一測繪院,安徽 合肥 230031;2. 安徽水利水電職業技術學院,安徽 合肥 231603)
傳統的隧道圍巖變形監測方法采用鋼尺收斂計接觸量測,它與施工相互干擾,人為因素影響較大,量測質量不穩定,導致其難以滿足現代隧道快速掘進、安全施工的要求。因此,研究和探索運用高精度的測量機器人在規定精度內對隧道圍巖變形進行自動監測、分析和預報的實用系統,具有重要的理論和實際意義。
1 極坐標法測量原理
如圖1所示,O為工作基點,測站鉛垂線方向為Z軸,以定向方向為X軸建立左手直角坐標系O-XYZ,P為監測點,起算邊至施測方向的夾角為α,OP的斜距為S,豎直角為γ;P點在坐標系中的坐標分別為P (XP,YP,ZP)[2],則有:
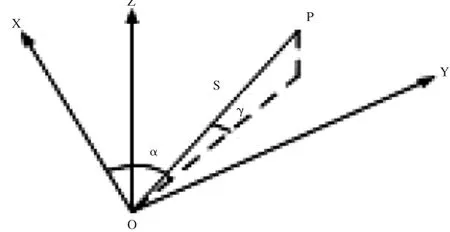
圖1 極坐標法測量坐標示意圖

2 極坐標法精度分析
在隧道監測中,需要準確測定監測點的三維坐標,即(X、Y、Z),并且還需綜合分析點位平面和高程精度。以TCA2003測量機器人監測結果為例,分析在不同距離及角度 (5°~50°) 情況下,加入大氣折光改正,儀器高中誤差,可計算極坐標法點位平面和高程精度并繪制精度曲線。極坐標法平面精度曲線如圖2所示,極坐標法高程精度曲線如圖3所示。
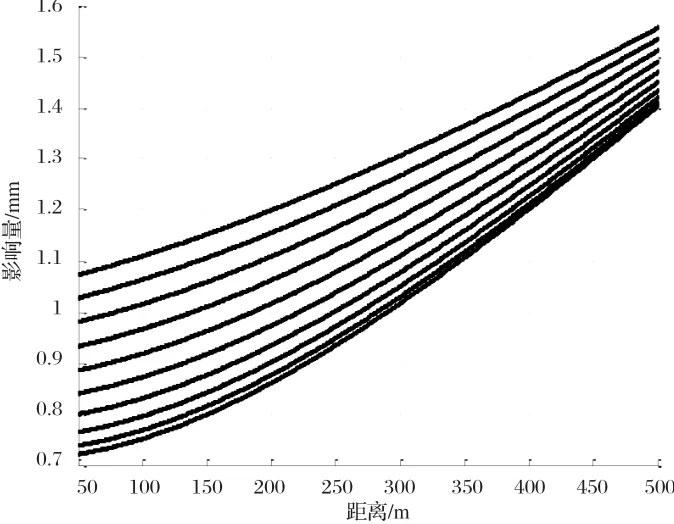
圖2 極坐標法平面精度曲線

圖3 極坐標法高程精度曲線
如圖2、3所示,在距離200 m,豎直角為20°范圍內,極坐標法的平面和高程精度可達1 mm。如果考慮隧道監測基點與監測點的相對位置關系,將極大地提高極坐標法三角高程測量的精度。
3 極坐標法監測數據采集系統
3.1 監測系統框架
在隧道變形監測中,需設立基準點和監測基點、然后對目標點進行觀測。
(1) 基準點 (參考點):基準點是進行變形觀測的起算點,用來定期檢校工作基點的參考點,至少保證在3個點以上,以相互檢校。基準點通常應位于變形區以外,點上放置采用強制對中裝置,要求覆蓋整個隧道變形監測區域。
(2) 監測基點 (工作基點):工作基點是直接用來測定各監測點的參考點,應選在靠近觀測目標且便于觀測監測點位置上。工作基點與基準點構成變形監測的首級網。
監測前,首先,依據變形體上目標點及參考點的分布情況,合理安置TCA2003全站儀,使所有目標點與全站儀的距離均在設置的觀測范圍內,且避免同一方向上有2個相似監測點,給測量機器人的目標識別帶來困難。
(3) 變形監測點:變形監測點應布設在變形體上,能充分反映隧道變形情況。變形監測點與工作基點構成次級網。對隧道各個變形監測斷面的間距、變形點的最大變形方向以及變形點的埋設位置,一般應綜合考慮確定。在隧道變形體以外的穩定區域也應適當布點,在隧道掘進方向及變形較快的地段,應適當加密。每個監測點上安有對準監測站的反射膜片。
3.2 極坐標法數據采集過程
極坐標法隧道變形監測系統,一般是由測量機器人、反射棱鏡 (反射膜片) 組成,一測站TCA2003全站儀的監測工作流程如圖4所示。
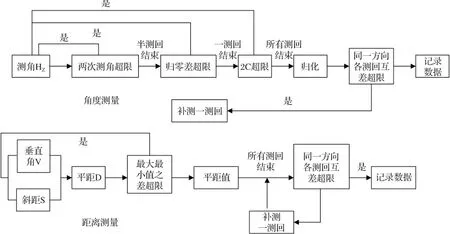
圖4 測量模塊工作流程
3.3 極坐標法監測步驟
(1) 在監測基點A架設測量機器人,后視K1點,K2作為參考點;(2) 后視K1點,確定將儀器坐標系統與監測網坐標系統相統一;(3) 啟動監測軟件,對儀器各項限差進行設置;(4) 利用學習測量, 將監測點的大致坐標通過學習測量,存儲到記錄文件中;(5) 進行各個監測點 (1~5號點) 自動監測,并記錄監測數據。
4 變形計算
在隧道變形監測中,通過極坐標法觀測各隧道斷面監測點坐標變化,計算變形點位移量,分析隧道變形趨勢。由于受實驗條件的限制,以及隧道實地監測周期較長,工作情況復雜等情況,沒有就相關理論及應用進行實踐驗證。本文利用某市地鐵隧道下行線S1斷面16期監測數據進行分析。
4.1 隧道斷面監測點變形計算
隧道收斂測量主要是計算隧道斷面各變形點平面和高程坐標的變形值,單位為毫米,分析隧道的穩定性,可由相關數據繪制S1斷面各點三維坐標在各時段的坐標位移圖,如圖5所示。

圖5 斷面S1各點三維坐標變化量
4.2 隧道頂板監測點變形計算
利用某市地鐵下行線隧道頂板4個監測點16期監測數據,計算每期相對沉陷量,如圖6所示。
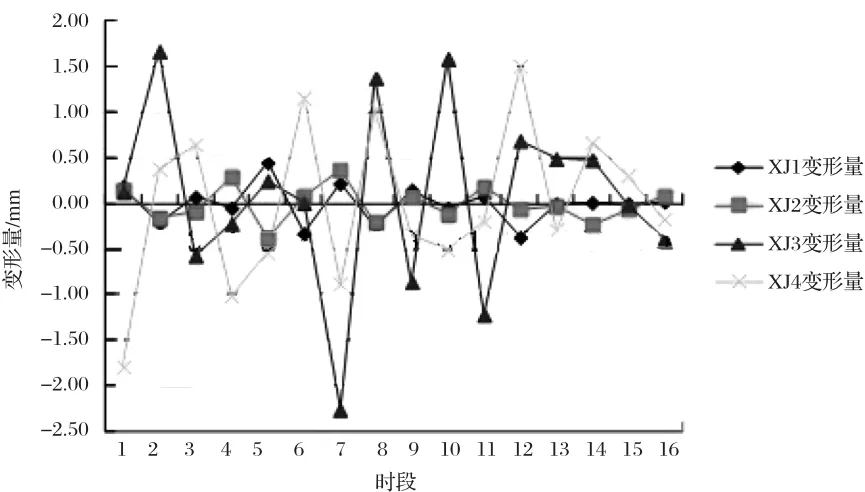
圖6 頂板監測點沉陷量示意圖
4.3 隧道變形分析
根據工程變形監測設計方案要求,監測精度要求為≤±0.5 mm,隧道變形允許值為5 mm,預警值和報警值分別取為2.5 mm和4 mm。
通過圖1~5可以看出,斷面S1各點的變形比較穩定,16期變形量累計不超過1 mm,變形量在監測系統安全范圍內,說明在監測過程中S1斷面是比較穩定的。通過圖1~6可以看出,XJ1、XJ2點的變形量相對較小,但XJ3、XJ4兩點變形量相對較大,是因為XJ3、XJ4在隧道開挖方向,最后開挖完成,受隧道開挖影響較大。總體來說,隧道頂板各點變形量在隧道安全施工允許值范圍內,沒有超過預警值2.5 mm,證明了監測點位的穩定性。
5 結語
本文主要介紹了利用極坐標法,通過對斷面監測點三維坐標變化量以及隧道頂板沉陷量的監測,計算隧道各監測點位移量,分析隧道變形趨勢,為隧道穩定性分析提供依據。通過數據分析證明,TCA2003測量機器人在高精度隧道自動變形監測系統中的應用是可靠的,能滿足生產實踐的要求。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
