基于四旋翼無人機的水空兩棲新型飛行器系統的設計
2019-09-04 09:42:38龍振超孟子涵張宏偉
科技創新與應用 2019年23期
龍振超 孟子涵 張宏偉


摘? 要:通過開展對兩棲飛機和四旋翼無人機的研究,提出一種以旋翼和螺旋槳提供動力快速靠近待救人員并將其救起的水空兩棲水上救援機器人的設計方案,該設計主要有飛行控制、無線通信、遠程遙控、圖像識別、動力、電源等六部分組成。
關鍵詞:水空兩棲;四旋翼無人機;水上救援;圖像識別
中圖分類號:TP242.3 文獻標志碼:A? ? ? ?文章編號:2095-2945(2019)23-0054-03
Abstract: Through the research on amphibious aircraft and four-rotor UAV, a design scheme of water-air amphibious waterborne rescue robot powered by rotor and propeller is proposed. The design is mainly composed of six parts: flight control, wireless communication, remote control, image recognition, power and electricity supply.
Keywords: water-air amphibious; four-rotor UAV; waterborne rescue; image recognition
1 概述
我國擁有眾多的江河湖泊和漫長的海岸線,人們在生產生活的過程中不可避免地要與水接觸,因此水上事故也時有發生。基于此,市場上的水上救援設備層出不窮,隨著無人機技術的不斷發展,其在應急救援領域也越來越受關注。按照用途可以將其劃分為軍用、民用和消費三種級別,其中軍用無人機在軍事領域已經得到了快速的發展,特別是在偵查、打擊和救援領域。由于無人機具有升力大、動力強、速度快、成本低、靈活性大、適應能力強等特點,因此選擇無人機作為救援工具的載體并結合救生艇以此來實現快速反應、快速救援。水空兩棲救援設備也必將成為社會發展的新趨向,對兩棲救援設備的研究必將引領科技創新領域的潮流。黑龍江科學雜志上曾發表過旋翼無人機在水上救援中的應用研究一文,文中闡述了旋翼無人機在水上救援的重要意義。水空兩棲應急救援設備的研發也為人們的安全提供了保障,為應急救援領域提供了強有力的技術支持,具有十分重要的意義[1]。
2 工作原理
水空兩棲飛行器的系統結構示意圖如圖1,借鑒穿浪雙體船的設計特點,從而減小了飛行器在水面航行時的興浪阻力,提高航行的穩定性,同時也使載重能力得到提升。該系統由六臺電機實現驅動,其中M1~M4為空中飛行用電機,主要負責為飛行器飛行提供動力,M5~M6為水面航行用電機,主要負責為飛行器在水面航行時提供動力,系統通過飛行控制器控制M1-M4四個電機的轉速的變化,來實現升力大小的變化,進而控制飛行器的飛行速度、方向、高度等的變化,靠近待救人員。
通過飛行器上所搭載的熱成像攝像機對救援水域進行掃描,并將圖像傳回救援人員手中,利用熱成像技術快速鎖定救援人員的位置,救援人員通過遠程遙控給飛行器下達指令,使飛行器迅速降落在待救人員身邊。同時,飛行器的M1-M4電機將全部鎖死,避免對待救人員造成傷害。此過程中,仰飛、懸停等特殊的動作是通過電調控制電機旋轉的速度、力矩和方向所產生的差值來實現的[2]。降落到待救人員身邊后,救援人員通過控制器控制尾部的螺旋槳進而驅動飛行器在水面上進行運動,靠近待救人員。在此過程中,由高清攝像機為操作者提供救援信息。待救人員爬上飛行器后,由感應裝置反饋信息,操作人員控制飛行器將待救人員送至岸邊,完成救援任務。
3 硬件電路設計
3.1 方案設計
系統的整體方案如圖2所示,操作人員通過R/C控制器發出指令,指令經過無線傳輸發送到R/C接收器,R/C接收器將信號轉發給飛行控制器STM32F407。飛行控制器對指令信息進行解讀計算出每個電機應該有的速度,并將信息發送給ESC(電子調速器)。ESC將接收到的信號轉換為電壓,為電機供電。電機通電后產生所需的推力,按照操作指令移動飛行器。慣性測量單元IMU能夠感知飛行器在空中的姿態,并將數據發送給飛行控制器。飛行控制器根據操作者指令以及IMU(以MPU6050為例)數據通過算法運算后控制飛行器穩定[3]。FPV系統中由熱成像攝像機收集圖像信息,通過視頻發射器傳輸回來,運用圖像識別技術對圖像進行分析處理。并通過北斗或GPS系統及時確定無人機所處的位置[4]。
3.2 飛行器硬件電路設計
3.2.1 電源供電電路的設計
系統穩壓供電電路選用的是3.3V電壓供電,由1200W功率的鋰電池輸出11.1V經降壓至5V后再由穩壓芯片AMS1117-3.3V降至3.3V,輸送給傳感器、 MPU6050以 STM30F407飛控芯片、NRF2401、JTAG/SWD調試接口如圖3所示。
3.2.2 無線通信電路的設計
系統的無線通信選用的是Nordic公司出品的NRF2401單片射頻收發芯片,芯片內置頻率合成器、功率放大器、晶體振蕩器和調制器等功能模塊。STM32飛控系統通過NRF2401發射或接收信號與外界保持聯系并接受指令,如圖3所示。
圖像傳輸采用的是LC329模塊,是一款為工業紅外相機及無人機航拍圖像傳輸所定制的基于WIFI無線圖像傳輸模塊。能夠達到不損失畫幅,不損失幀率的要求,支持STA/AP傳輸,支持低功耗。
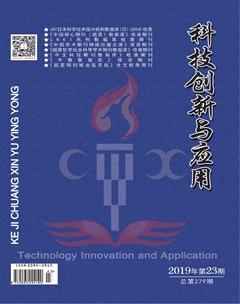
3.2.3 電機驅動電路設計
如圖4所示,飛控系統接收到指令后,以PWM波的方式發送給電調,電調接收后經過解算計算并輸出信號給無刷電機,無刷電機收到信號后進行運動,完成電機的驅動。系統共計使用6個電機控制飛行器在空中及水面的動作和狀態[5]。
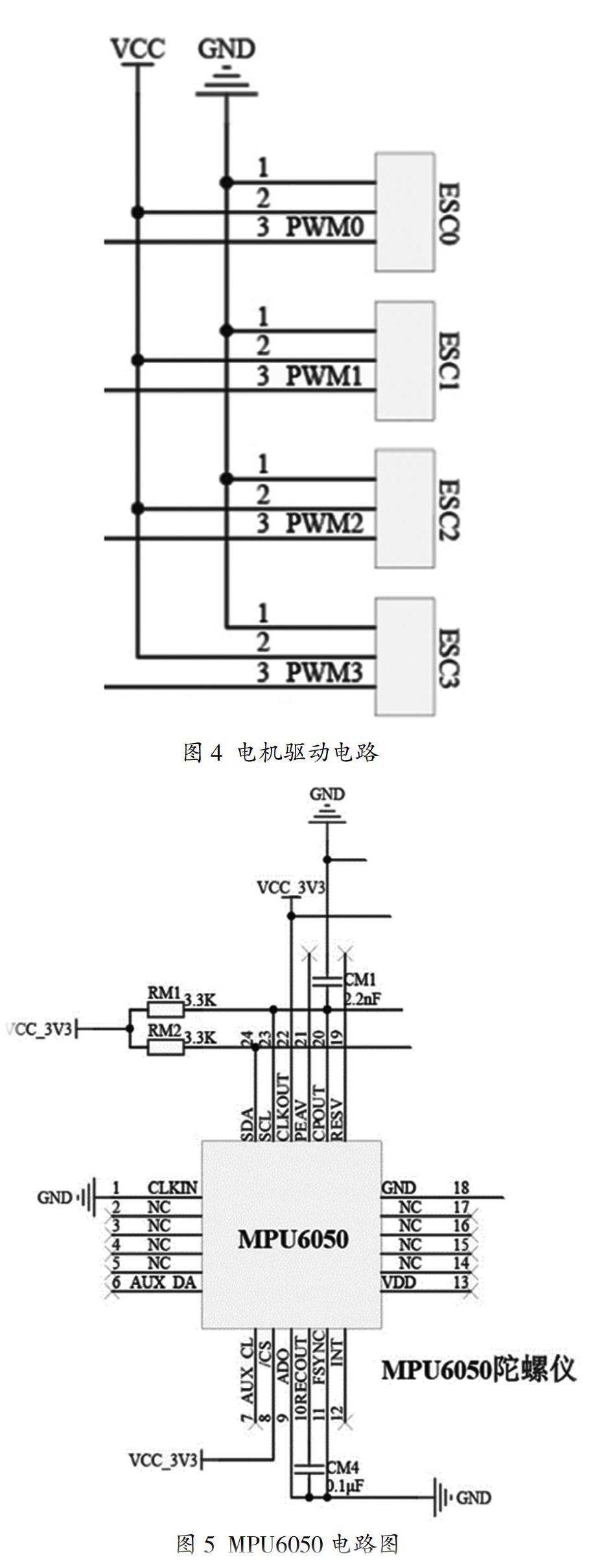
3.2.4 傳感器電路的設計
如圖5所示,系統選用MPU-6050運動感測傳感器感知飛行器狀態,MPU-6050提供完整的9軸運動融合輸出到主I2C端口。I2C連接到飛控系統STM32上(SCL和SDA是連接MPU的I2C接口),從而根據飛行器的狀態來調整電機的轉速,完成自我糾正[6]。
4 飛行器主程序流程圖設計
飛行器主程序流程圖如圖6所示,開機后系統完成初始化,電調解鎖成功STM32F407控制系統初始化完成,接受到指令后串口發生中斷,控制器按照指令進行工作。在工作過程中MPU6050慣性測量單元將測量值反饋給控制系統,觸發串口中斷,進行飛行姿態矯正。
5 結論
本文以水空兩棲飛行器作為研究對象,通過對四旋翼飛行器及穿浪式雙體船的結合,實現了水、空兩種運動方式,極大地拓展了水空兩棲應急救援飛行器適應環境的能力及執行任務的復雜性與可靠性。本文研究的飛行器共有3種運行狀態,以水面航行狀態靠近待救者,載其駛離救援水域。由于空中飛行時通過四個電機的轉速來調整姿態,所以潛水器運動時有六個狀態輸出,改善了潛水器在復雜環境下的適應能力,提高了水上救援的效率,減少了水中意外的傷亡,為水上應急救援工作提供了強有力的保障。
參考文獻:
[1]王夢達.基于STM32的潛水四螺旋槳救援機器人設計[D].河南理工大學,2018:10-11.
[2]王梓藤.四旋翼無人機驅動器閉環對姿態穩定性影響的研究[D].寧夏大學,2016:10-11.
[3]陳新泉.四旋翼無人機飛控系統設計與研究[D].南昌航空大學,2014:17-20.
[4]徐文,孟文,曾麗.基于STM32與WiFi無線通訊技術的遠程監控系統設計[J].自動化與儀表,2016,31(11):35-38+56.
[5]陳柯,李媛媛,方璇,等.單片機驅動電機的設計與實現[J].實驗室研究與探索,2016,35(03):119-122.
[6]李臣龍,強俊.基于STM32和MPU6050姿態解算的研究與實現[J].佳木斯大學學報(自然科學版),2017,35(02):295-298+316.