基于PSO-SVM的手勢識(shí)別方法研究
2019-09-02 09:18:02胡命嘉宮玉琳王鋒
胡命嘉,宮玉琳,王鋒
(長春理工大學(xué) 電子信息工程學(xué)院,長春 130022)
手勢動(dòng)作識(shí)別即是通過傳感器采集手勢動(dòng)作所產(chǎn)生的相關(guān)信息,來識(shí)別手勢動(dòng)作的一種方法,sEMG蘊(yùn)含著豐富的肌肉動(dòng)作信息,能反映肌肉的運(yùn)動(dòng)狀態(tài),通過分析不同類型動(dòng)作的sEMG差異,即可區(qū)分出不同的動(dòng)作模式[1],且信號(hào)的強(qiáng)弱取決于肌肉的活動(dòng)量大小[2],因而sEMG在人機(jī)交互、康復(fù)醫(yī)學(xué)以及體育科學(xué)等領(lǐng)域具有較高的實(shí)用價(jià)值。
隨著對(duì)sEMG的不斷深入研究,國內(nèi)外現(xiàn)已取得了一定的成果。文獻(xiàn)[3]從前臂的4塊肌肉上采集4路sEMG,再提取5個(gè)特征,通過BP神經(jīng)網(wǎng)絡(luò)對(duì)sEMG進(jìn)行分類識(shí)別,取得了較高的識(shí)別準(zhǔn)確率;文獻(xiàn)[4]通過將信號(hào)的5種特征參數(shù)相融合,利用LDA分類器進(jìn)行分類識(shí)別,驗(yàn)證了在不同特征組合和維數(shù)下,都能取得較好的成果;文獻(xiàn)[5]設(shè)計(jì)一套基于肌電控制的輔助型機(jī)器人外骨骼,通過基于貝葉斯決策的線性判別分析方法判別運(yùn)動(dòng)類別,對(duì)于5類動(dòng)作的平均在線識(shí)別率達(dá)到了95%以上。但科研人員不僅要考慮識(shí)別的準(zhǔn)確率問題,還要考慮實(shí)時(shí)性、差異性等問題,要進(jìn)行更深入的研究。
本文通過MYO臂環(huán)采集上肢動(dòng)作時(shí)產(chǎn)生的肌電信號(hào),通過經(jīng)PSO優(yōu)化的SVM分類器對(duì)4種手勢動(dòng)作進(jìn)行識(shí)別,取得了較好的分類效果。
1 手勢識(shí)別方法
經(jīng)MYO臂環(huán)采集的信號(hào)數(shù)據(jù),由藍(lán)牙傳至電腦后,對(duì)數(shù)據(jù)進(jìn)行處理與識(shí)別,手勢識(shí)別方法如圖1所示,主要包括起始點(diǎn)檢測、特征提取和模式識(shí)別三個(gè)部分。
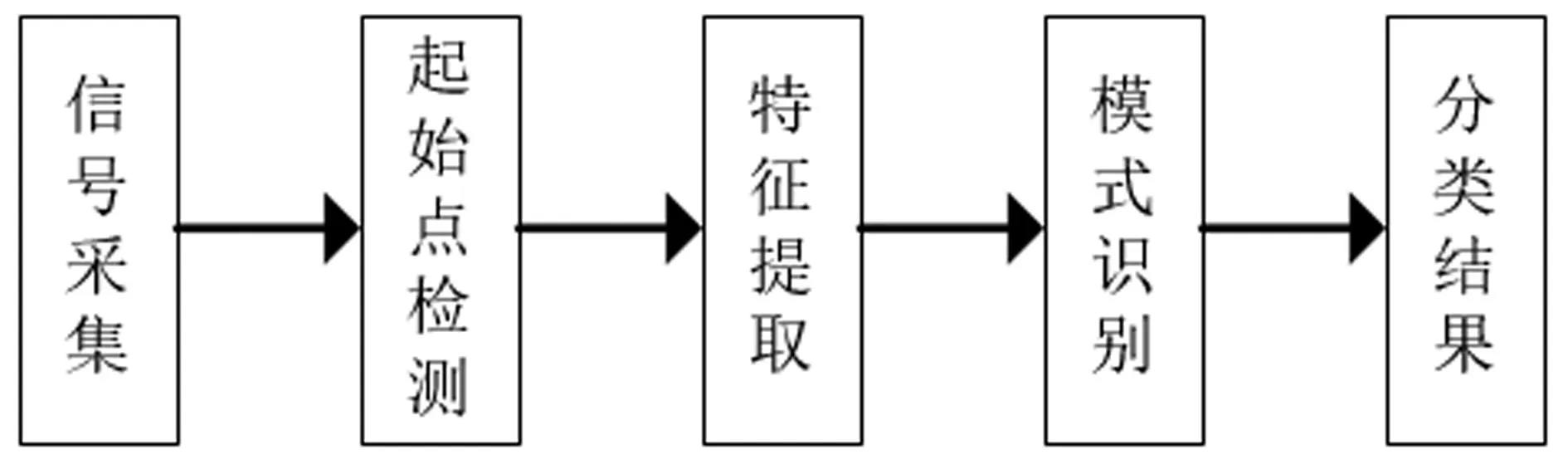
圖1 手勢識(shí)別方法
1.1 信號(hào)采集
為獲得表面肌電信號(hào),需要將人體產(chǎn)生的生物電信號(hào)轉(zhuǎn)換為電路中的電壓信號(hào),在實(shí)際運(yùn)用中,常通過肌電信號(hào)釆集設(shè)備獲取人體肌電信號(hào)[6]。目前國內(nèi)外研制了各種各樣的肌電信號(hào)采集設(shè)備用于采集表面肌電信號(hào),例如Delsys公司研制的Trigno16通道肌電信號(hào)無線釆集系統(tǒng),能夠接收40米內(nèi)的肌電信號(hào)傳感器信號(hào);美國的ATHOS公司研制了一套肌電信號(hào)采集衣,將肌電信號(hào)傳感器內(nèi)嵌在訓(xùn)練衣上用于采集和分析人體運(yùn)動(dòng)時(shí)的肌電信號(hào);加拿大Thalmic Labs公司所研發(fā)的MYO臂環(huán),由彈簧扣將8個(gè)傳感器等距離的排列在一起,可以佩戴在手臂上的任意位置,用來檢測肢體動(dòng)作時(shí)所產(chǎn)生的肌電信號(hào),再用藍(lán)牙將采集到的信號(hào)數(shù)據(jù)傳輸?shù)接?jì)算機(jī)中。
考慮到實(shí)驗(yàn)操作的可行性和便捷性,本文通過MYO臂環(huán)采集手掌外張、手掌內(nèi)張、握拳、張手四種手勢動(dòng)作所產(chǎn)生的表面肌電信號(hào)作為試驗(yàn)數(shù)據(jù),進(jìn)行研究。四種手勢動(dòng)作如圖2所示,圖2(a)為放松狀態(tài),圖2(b)-圖2(e)為四種手勢動(dòng)作,在數(shù)據(jù)采集過程中,規(guī)定放松-動(dòng)作-放松為一次完整的動(dòng)作,每種動(dòng)作完整重復(fù)48次。
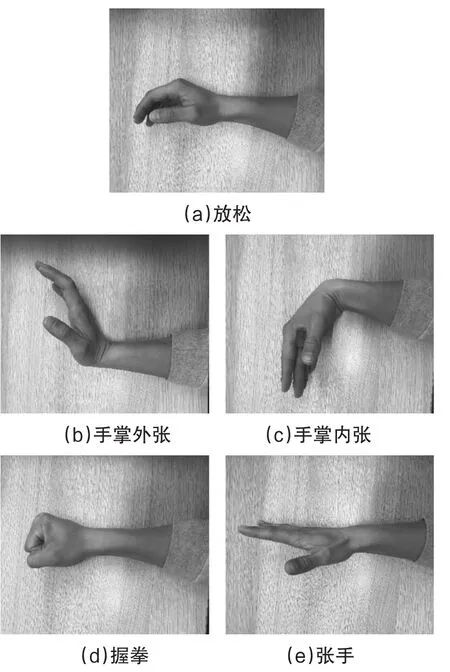
圖2 四種手勢動(dòng)作示意圖
1.2 動(dòng)作起始點(diǎn)檢測
動(dòng)作起止點(diǎn)的檢測方法有閾值法、標(biāo)準(zhǔn)差檢測法、移動(dòng)平均法等,本文選擇將閾值法與移動(dòng)平均法相結(jié)合作為判斷動(dòng)作起始點(diǎn)的方法,步驟如下:
(1)先對(duì)每種動(dòng)作的8個(gè)通道的原始sEMG數(shù)據(jù)進(jìn)行絕對(duì)值處理再滑動(dòng)求和,記為sum_emgI,滑動(dòng)長度L=50:

式中,N為采樣點(diǎn)的長度,I為通道個(gè)數(shù),xk為采樣點(diǎn)。
(2)再求單個(gè) sum_emgI的平均值,記為emg_MAVI(L):

(3)再將I個(gè)通道的emg_MAVI()I信號(hào)相加,根據(jù)設(shè)定的閾值尋找動(dòng)作起止點(diǎn),找出有效的數(shù)據(jù)段:

1.3 特征提取
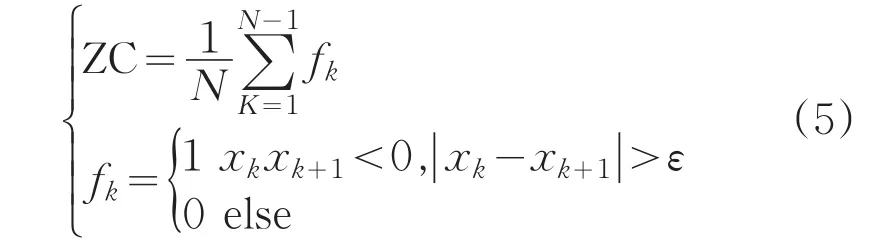
特征選擇是動(dòng)作模式識(shí)別的關(guān)鍵。sEMG攜帶有不同手勢動(dòng)作的信息[7],特征提取的目的是將不同手勢動(dòng)作盡可能區(qū)分,通過sEMG的某一特征數(shù)據(jù)來表示。目前在肌電信號(hào)分類方面主要的特征提取方法有時(shí)域特征、頻域特征、時(shí)頻特征。因時(shí)域特征也能獲得較好的分類特性,且具有計(jì)算量少、獲取迅速等優(yōu)點(diǎn),本文選取時(shí)域特征作為分類標(biāo)準(zhǔn),為平均絕對(duì)值(MAV)、過零點(diǎn)數(shù)(ZC)、波形長度(WL)。
平均絕對(duì)值如(4)式所示:

過零點(diǎn)數(shù)如(5)式所示:
波形長度如(6)式所示:

在實(shí)驗(yàn)過程中,提取一次動(dòng)作的24維特征樣本數(shù)據(jù)(即MYO臂環(huán)的每個(gè)通道提取3個(gè)時(shí)域特征)。
1.4 SVM分類器
模式分類是指通過分類器對(duì)輸入的特征向量進(jìn)行歸類的過程,分類器是一種數(shù)學(xué)模型,根據(jù)一定的數(shù)學(xué)算法,對(duì)輸入的特征向量進(jìn)行辨識(shí),并將這些特征向量所屬的類型輸出。本文選擇的分類器為支持向量機(jī)(SVM)。SVM是1995年由Vapnik提出的一種監(jiān)督式機(jī)器學(xué)習(xí)方法,用于解決小樣本、非線性、高維特征的分類問題,其基本原理為:將二分類問題中的非線性特征映射到高維空間,使得非線性特征在高維空間線性可分,再在高維空間構(gòu)建超平面實(shí)現(xiàn)對(duì)樣本的分類[8]。圖3(a)為SVM原理示意圖,現(xiàn)有兩種不同類的樣本,存在多條直線可以將兩類坐標(biāo)分開,但是否存在最優(yōu)方案?SVM分類器即定義如下規(guī)則:若一條分割的直線離坐標(biāo)點(diǎn)太近,則會(huì)受到噪聲的影響,則不是最佳的。因此,目標(biāo)是找到一條分割線,要求離所有的樣本點(diǎn)都盡可能的遠(yuǎn),即最優(yōu)超平面,如圖3(b)所示。
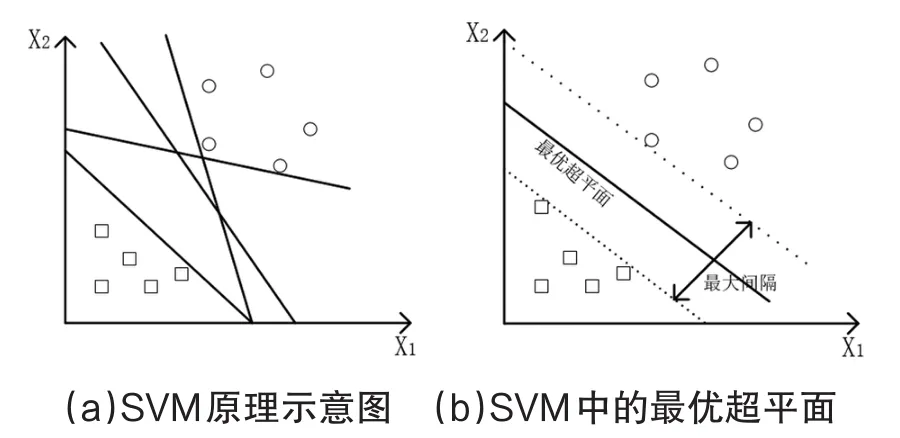
圖3 SVM說明
現(xiàn)假設(shè)超平面為f(x),其表達(dá)式如式(7)所示:

δi定義為特征向量xi到超平面的幾何距離,如式(8)所示:

式中,m為訓(xùn)練樣本數(shù)量。
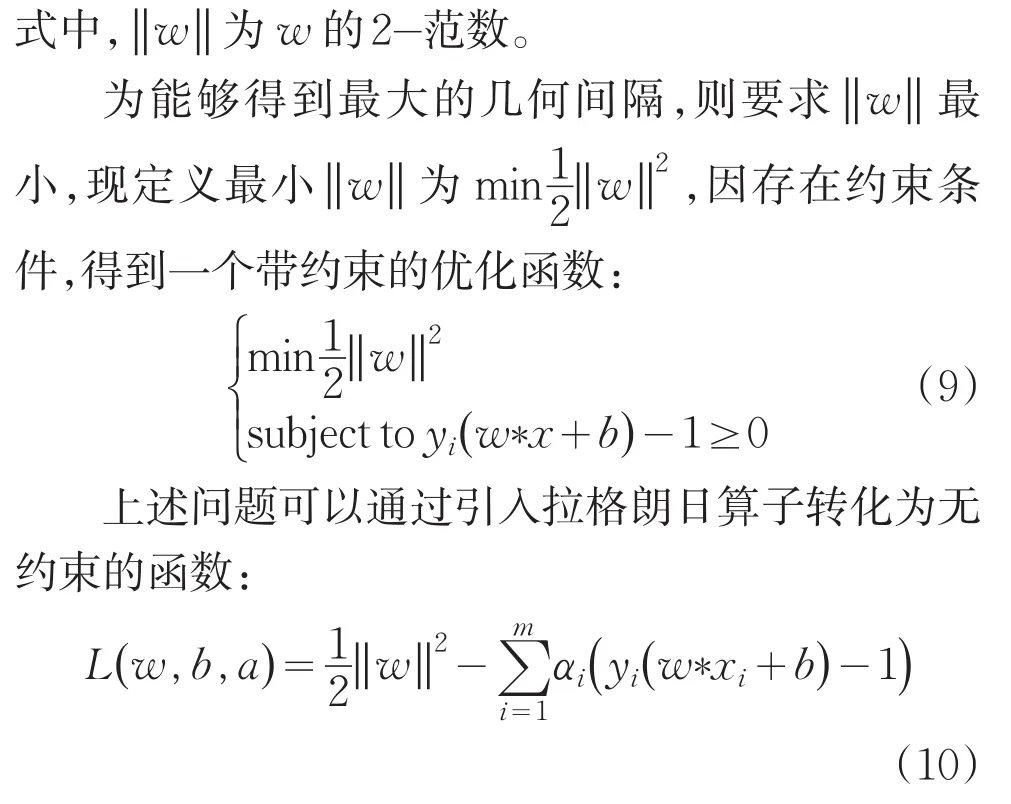
引入拉格朗日乘子后,優(yōu)化函數(shù)轉(zhuǎn)變?yōu)椋?/p>

此優(yōu)化函數(shù)滿足KKT(Karush Kuhn Tucher)條件,則通過拉格朗日對(duì)偶將優(yōu)化問題轉(zhuǎn)化為等價(jià)的對(duì)偶問題來求解。根據(jù)KKT條件中的對(duì)偶互補(bǔ),有:

若ai>0,則有yi(w*x+b)=1,即點(diǎn)在支持向量上,否則如果ai=0,則有yi(w*x+b)≥1,即樣本已經(jīng)被準(zhǔn)確分類或在支持向量上。
雖然SVM分類器具有適應(yīng)性和泛化能力強(qiáng),有效解決非線性、樣本量少等優(yōu)點(diǎn),但是分類效果會(huì)受到數(shù)據(jù)模式的限制,且受懲罰參數(shù)C、核半徑參數(shù)g的影響較大。
2 PSO-SVM分類器設(shè)計(jì)
考慮到SVM分類器受懲罰參數(shù)C、核半徑參數(shù)g的影響較大,且人為難以找出合適的參數(shù),現(xiàn)引入粒子群優(yōu)化算法(PSO)對(duì)SVM分類器進(jìn)行優(yōu)化,尋找合適的參數(shù)。
2.1 粒子群優(yōu)化算法
PSO算法最早是由Kennedy等人于1995年提出的,源于對(duì)人工生命和鳥群捕食行為的研究,其基本核心是利用群體中的個(gè)體對(duì)信息的共享從而使得整個(gè)群體的運(yùn)動(dòng)在問題求解空間中產(chǎn)生從無序到有序的演化過程,從而獲得問題的最優(yōu)解。
算法中粒子速度與位置通過迭代進(jìn)行更新,迭代公式為:

2.2 PSO-SVM分類器
PSO對(duì)SVM的優(yōu)化是為了得到一組誤差最小的懲罰函數(shù)與核函數(shù),使得優(yōu)化后的分類器能夠取得更好的分類效果,其基本思想如下:
(1)初始化粒子群。設(shè)所求問題的自變量有M維,種群大小為N,則初始化粒子的位置信息表示如下:
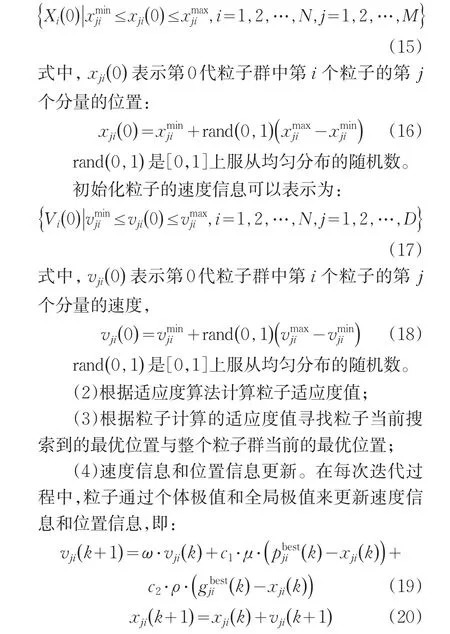
式中,ω為慣性權(quán)重保持原來速度的系數(shù),本文中設(shè)定為0.6;k為當(dāng)前迭代次數(shù);c1,c2是學(xué)習(xí)因子,分別是粒子跟蹤自身歷史最優(yōu)解的權(quán)重系數(shù)和粒子跟蹤群體最優(yōu)解的權(quán)重系數(shù),分別取值為1.6與1.9;μ和ρ是均勻分布于[0,1]區(qū)間的隨機(jī)數(shù)。
反復(fù)執(zhí)行(2)與(4),直到達(dá)到最大進(jìn)化代數(shù),或達(dá)到所要求的收斂精度。
算法整體過程如圖4所示。
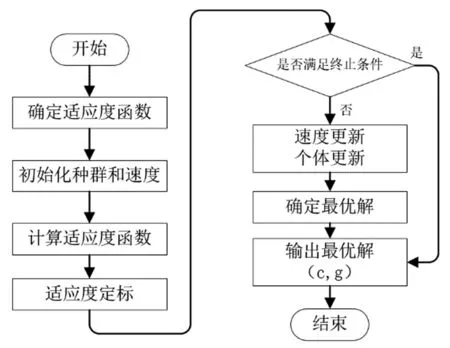
圖4 PSO優(yōu)化SVM參數(shù)的算法流程圖
3 實(shí)驗(yàn)結(jié)果分析
3.1 起始點(diǎn)檢測實(shí)驗(yàn)結(jié)果
為尋找合適的動(dòng)作起始點(diǎn),如(3)式所示,將各個(gè)通道信號(hào)的平均絕對(duì)值(MAV)相加,選取0為判斷動(dòng)作起始點(diǎn)的閾值,0以上的信號(hào)為實(shí)驗(yàn)所需部分。圖5為8個(gè)通道原始數(shù)據(jù)的波形圖,圖6為將取各通道的平均絕對(duì)值后的波形圖,其中有用部分的數(shù)據(jù)段分別為89-192,462-625,937-1102,1409-1549,1892-1999。

圖5 八個(gè)通道原始數(shù)據(jù)波形圖
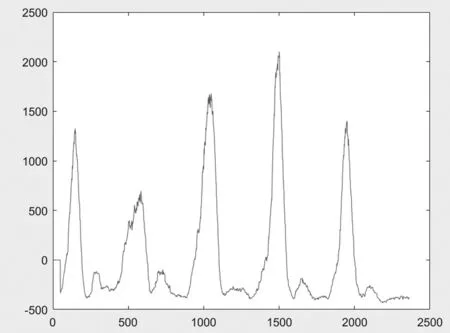
圖6 八個(gè)通道MAV疊加波形圖
3.2 動(dòng)作分類實(shí)驗(yàn)結(jié)果
將處理后的信號(hào)數(shù)據(jù)代入到分類器中,對(duì)比SVM分類器和PSO-SVM分類器。在SVM分類器在訓(xùn)練數(shù)據(jù)數(shù)量為5時(shí),其準(zhǔn)確率只有74%,如圖7所示,而PSO-SVM分類器在測試集數(shù)據(jù)數(shù)量為5時(shí),其分類的準(zhǔn)確可達(dá)到94%,如圖8所示。定義類別標(biāo)簽1為手掌外張,標(biāo)簽2為手掌外張,標(biāo)簽3為握拳,標(biāo)簽4為張手。粒子群優(yōu)化算法的迭代過程如圖9所示,隨著迭代次數(shù)的增加準(zhǔn)確率逐漸趨近于最佳參數(shù)的適應(yīng)度。
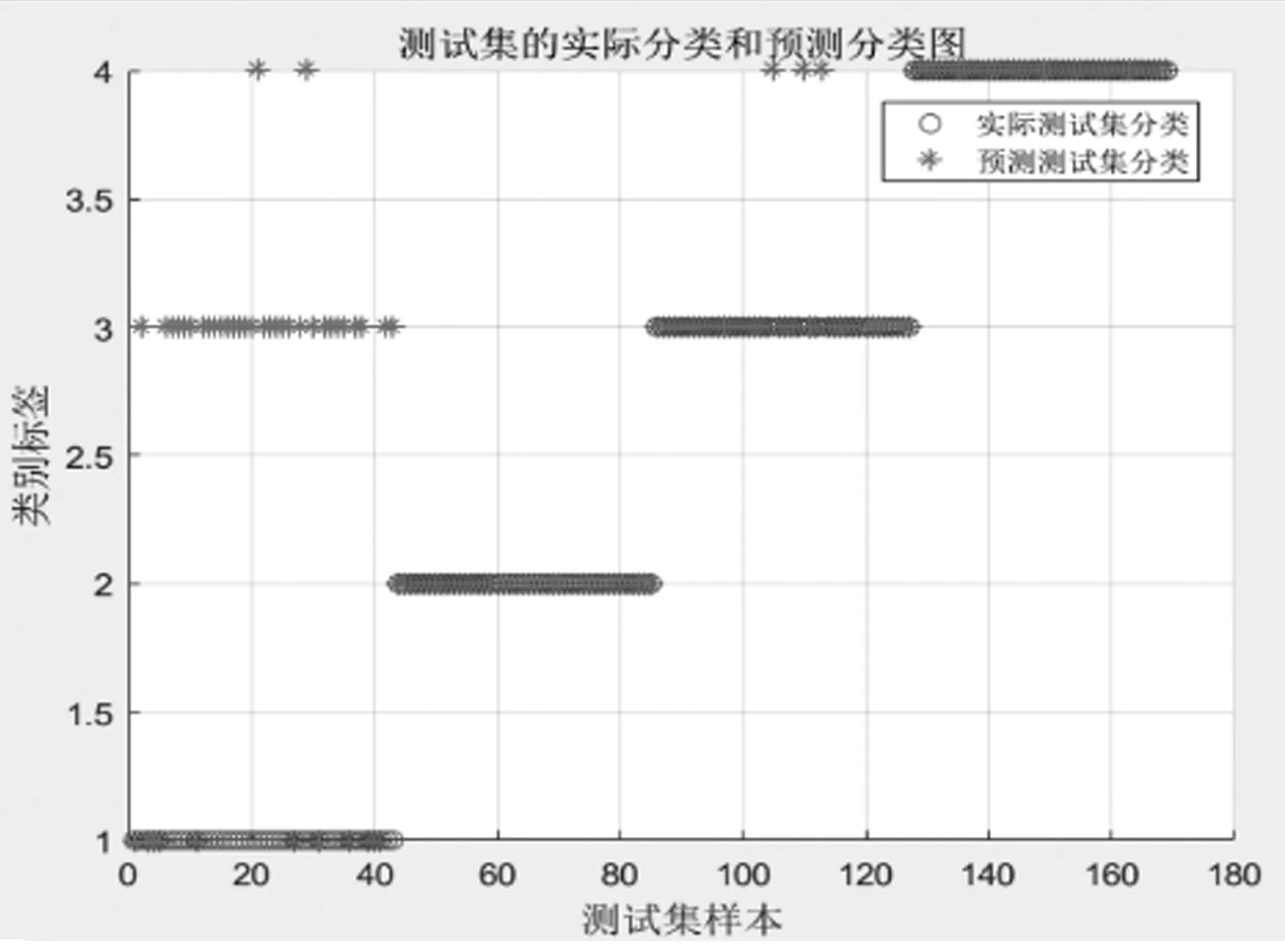
圖7 測試集數(shù)據(jù)為5的SVM分類結(jié)果
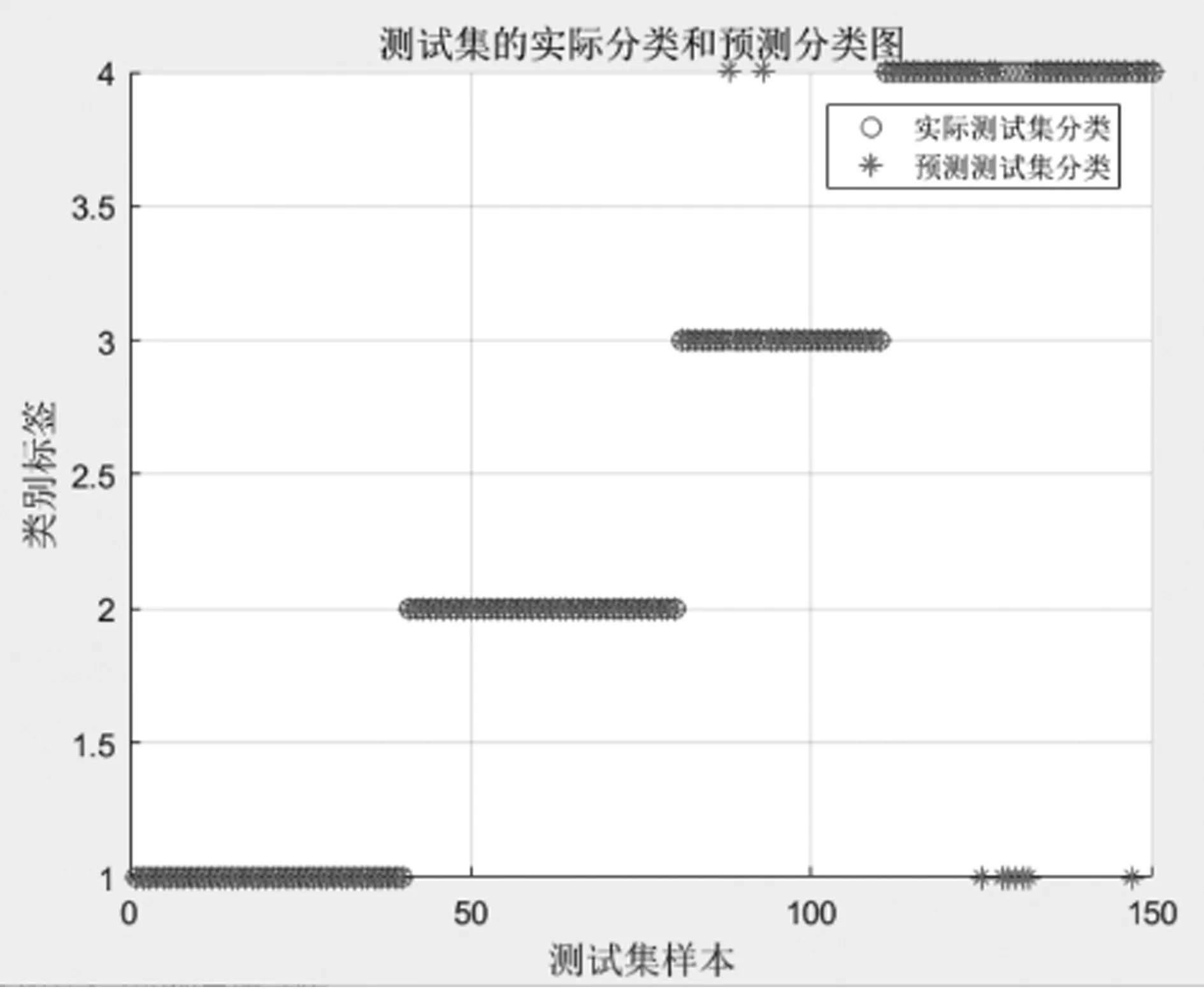
圖8 測試集數(shù)據(jù)為5的PSO-SVM分類結(jié)果
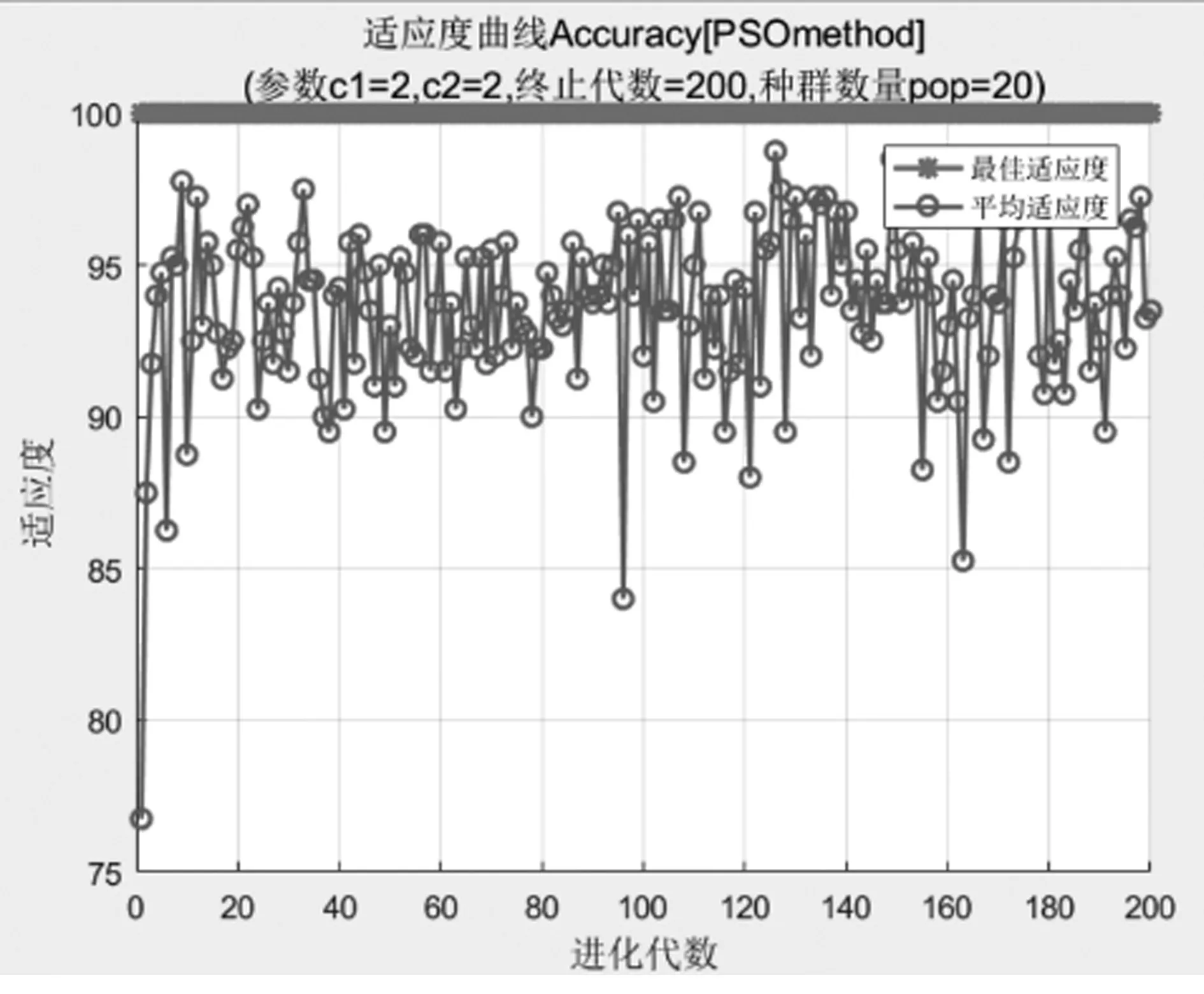
圖9 PSO尋找最佳參數(shù)準(zhǔn)確率曲線圖
當(dāng)訓(xùn)練數(shù)據(jù)數(shù)量都為8時(shí),經(jīng)實(shí)驗(yàn)結(jié)果證明:SVM分類器的分類準(zhǔn)確率為79.3%,PSO-SVM分類準(zhǔn)確率為97.6%,分別如圖10、11所示,PSO的迭代過程如圖12所示。
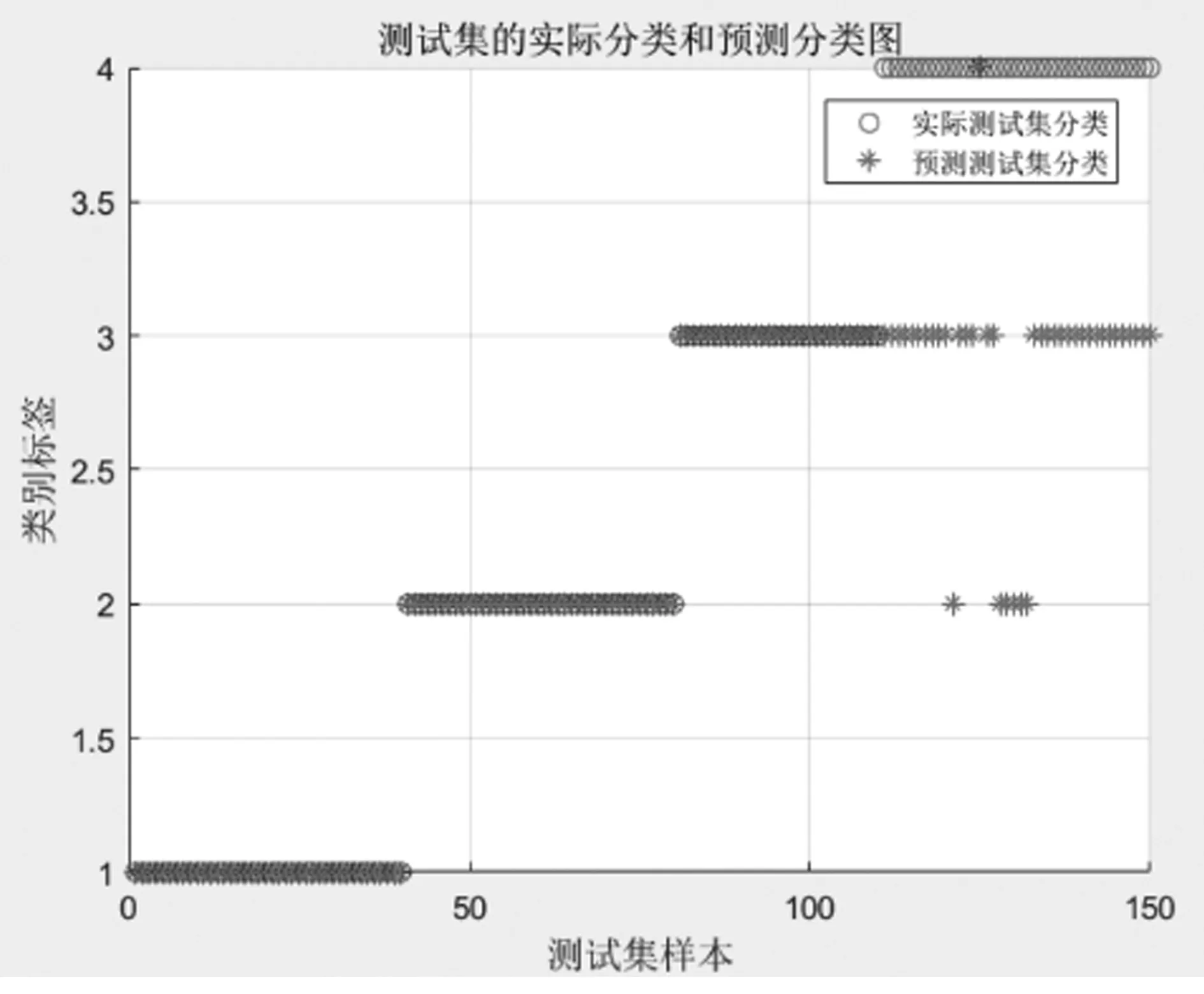
圖10 測試集數(shù)據(jù)為8的SVM分類結(jié)果
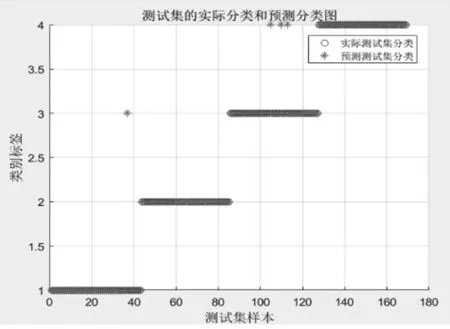
圖11 測試集數(shù)據(jù)為8的PSO-SVM分類結(jié)果
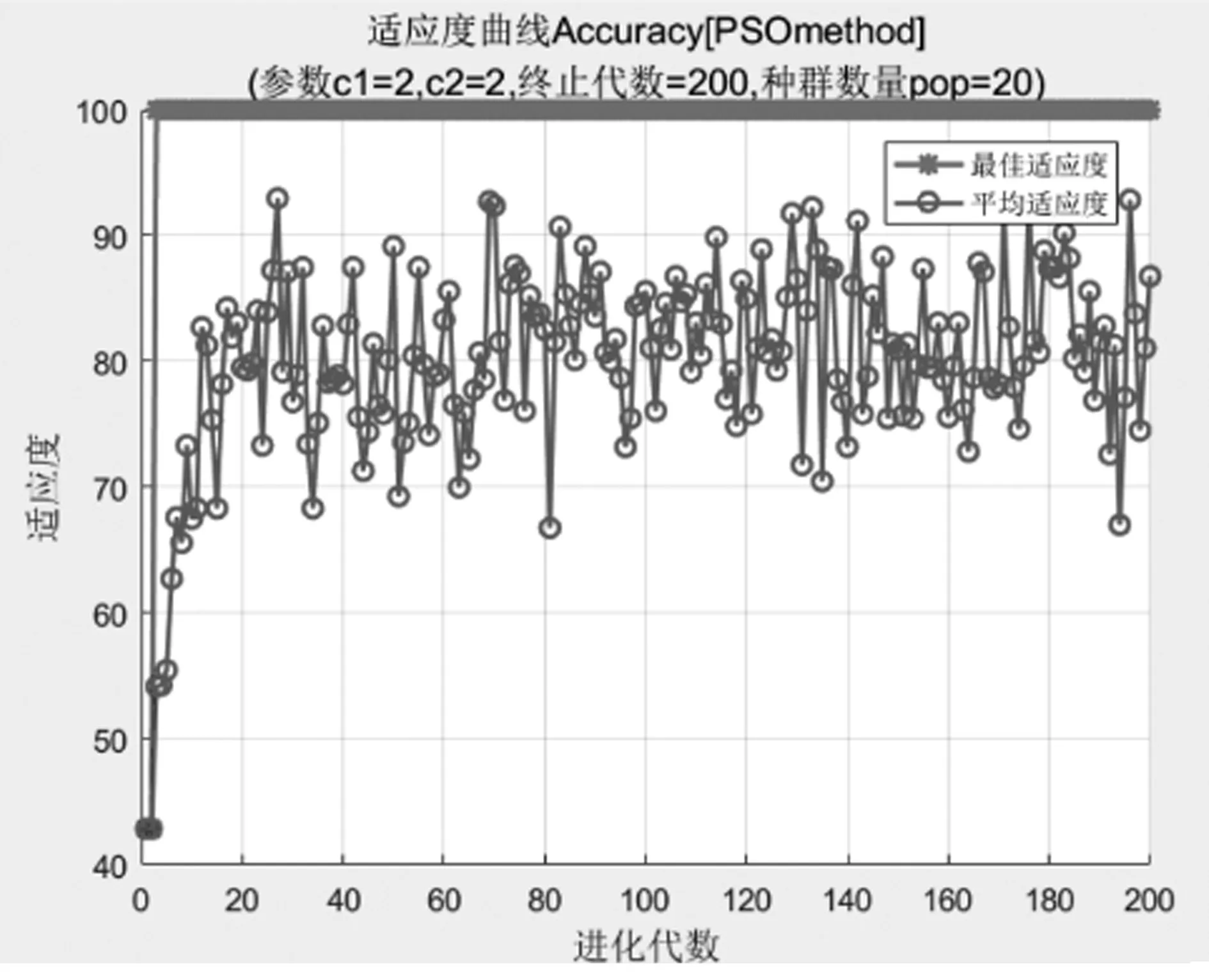
圖12 PSO尋找最佳參數(shù)準(zhǔn)確率曲線圖
再將測試集數(shù)據(jù)數(shù)量依次改為10、15,兩者的分類效果如圖13所示,其中橫坐標(biāo)處的5、8、10、15分別表示訓(xùn)練集的數(shù)據(jù)數(shù)量為5、8、10、15。
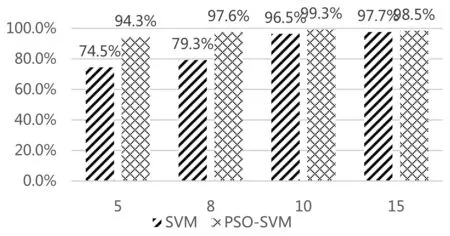
圖13 SVM與PSO-SVM的準(zhǔn)確率對(duì)比
由圖13可知:SVM分類器的平均識(shí)別率為86.8%,而PSO-SVM的平均識(shí)別率為97.4%,當(dāng)訓(xùn)練集的數(shù)據(jù)較少的情況下,PSO-SVM的分類效果較SVM分類效果明顯提高很多;在分類器的訓(xùn)練數(shù)據(jù)較充充足的情況,由于分類器內(nèi)部訓(xùn)練較成熟,兩者差異較小,但PSO-SVM的分類效果依然比SVM要好,由此可見PSO對(duì)SVM分類器有了較好的優(yōu)化。
4 結(jié)論
本文提取了3個(gè)時(shí)域特征:平均絕對(duì)值、過零點(diǎn)數(shù)和波形長度,通過PSO算法對(duì)SVM分類器進(jìn)行優(yōu)化,再進(jìn)行分類識(shí)別,準(zhǔn)確率達(dá)到了97.4%,取得了較為理想的效果,說明該方法能很好的進(jìn)行模式識(shí)別。但是仍存在不足,本文未考慮到個(gè)體間特異性,動(dòng)作的多樣性以及處理的實(shí)時(shí)性,在后期的工作中需要重點(diǎn)解決。
猜你喜歡
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41