雙凸輪和不完全齒輪傳動(dòng)機(jī)構(gòu)設(shè)計(jì)
2019-09-02 09:17:38張曉瑞張立中李小明
張曉瑞,張立中,李小明
(1.長春理工大學(xué) 空間光電技術(shù)國家地方聯(lián)合工程研究中心,長春 130022;2.長春理工大學(xué) 空地激光通信技術(shù)國防重點(diǎn)學(xué)科實(shí)驗(yàn)室,長春 130022;3.長春理工大學(xué) 機(jī)電工程學(xué)院,長春 130022)
空間激光通信是利用激光束作為信息載體的一種嶄新的空間通信手段,具有數(shù)據(jù)傳輸率高、保密性好、功耗低、體積小、重量較輕等諸多優(yōu)點(diǎn),可以滿足地球同步衛(wèi)星(GEO)對地球高速通信的需求[1-2]。利用GEO作為中繼衛(wèi)星平臺(tái),構(gòu)建LEO-GEO-地鏈路,可以有效擴(kuò)大低軌衛(wèi)星對地通信的范圍,因此GEO-地是激光通信中的一個(gè)重要鏈路[3-4]。
GEO衛(wèi)星對地面通信鏈路距離約為4萬公里,為保證足夠的探測光強(qiáng),通信激光發(fā)射束一般為幾十個(gè)μrad,這就要求通信時(shí)通信轉(zhuǎn)動(dòng)軸有足夠的對準(zhǔn)精度[5]。GEO衛(wèi)星對地面通信時(shí)衛(wèi)星與地面站的相對位置保持不變,同時(shí)衛(wèi)星自身姿態(tài)保持能力較好,變化速度非常慢[6],粗跟蹤系統(tǒng)保證轉(zhuǎn)動(dòng)軸對準(zhǔn)在精跟蹤視場內(nèi)即可滿足工作要求不必進(jìn)行實(shí)時(shí)跟蹤,轉(zhuǎn)動(dòng)軸偏移可以由精跟蹤系統(tǒng)調(diào)整。當(dāng)衛(wèi)星軌道偏移過大超出精跟蹤視場時(shí),粗跟蹤系統(tǒng)才需要進(jìn)行間歇性的大范圍調(diào)整。
傳統(tǒng)空間轉(zhuǎn)臺(tái)粗跟蹤系統(tǒng)傳動(dòng)方式多為直接驅(qū)動(dòng),雖然直接用電機(jī)和輸出軸進(jìn)行連接可以保證精度和帶寬,但是電機(jī)必須持續(xù)工作用以保證轉(zhuǎn)動(dòng)軸位置,造成系統(tǒng)平均功耗較大[7]。
采用自鎖功能傳動(dòng)機(jī)構(gòu)應(yīng)用于激光通信的跟瞄轉(zhuǎn)臺(tái),保持轉(zhuǎn)動(dòng)軸始終處于精跟蹤視場內(nèi),從而減小系統(tǒng)功耗。同時(shí),傳動(dòng)機(jī)構(gòu)間歇工作,與連續(xù)工作的機(jī)構(gòu)相比其固體潤滑膜損傷減小,有利于提高系統(tǒng)壽命[8]。
1 傳動(dòng)機(jī)構(gòu)方案與原理
本文要求系統(tǒng)轉(zhuǎn)動(dòng)軸調(diào)整范圍為±5°,對準(zhǔn)精度要求為50μrad(1σ),因此傳動(dòng)機(jī)構(gòu)的調(diào)整分辨率設(shè)計(jì)優(yōu)于5",位置調(diào)整精度優(yōu)于10"。
1.1 機(jī)構(gòu)方案設(shè)計(jì)
結(jié)合復(fù)合跟蹤結(jié)構(gòu)粗精兩級(jí)跟蹤原理,設(shè)計(jì)了基于雙凸輪與不完全齒輪傳動(dòng)機(jī)構(gòu),利用粗精兩個(gè)凸輪分別實(shí)現(xiàn)轉(zhuǎn)動(dòng)軸的粗精兩級(jí)調(diào)整。粗調(diào)整轉(zhuǎn)動(dòng)范圍大、精度低,完成轉(zhuǎn)臺(tái)的大范圍轉(zhuǎn)動(dòng);精調(diào)整轉(zhuǎn)動(dòng)范圍小、精度高,在粗調(diào)大范圍轉(zhuǎn)動(dòng)的基礎(chǔ)上,實(shí)現(xiàn)轉(zhuǎn)臺(tái)軸系的高精度轉(zhuǎn)動(dòng)。系統(tǒng)的轉(zhuǎn)動(dòng)軸調(diào)整精度由角度傳感器精度決定。
傳動(dòng)機(jī)構(gòu)由導(dǎo)軌、滑塊、精調(diào)凸輪、主動(dòng)不完全齒輪、從動(dòng)不完全齒輪、粗調(diào)凸輪、擺桿和負(fù)載轉(zhuǎn)動(dòng)軸組成。導(dǎo)軌、負(fù)載轉(zhuǎn)動(dòng)軸和精調(diào)凸輪轉(zhuǎn)動(dòng)軸相對位置固定,導(dǎo)軌上安裝能左右滑動(dòng)的滑塊,粗調(diào)凸輪安裝在滑塊上并安裝從動(dòng)不完全齒輪,粗調(diào)凸輪繞粗調(diào)凸輪轉(zhuǎn)動(dòng)軸轉(zhuǎn)動(dòng),滑塊可以帶動(dòng)粗調(diào)凸輪平動(dòng),粗調(diào)凸輪推動(dòng)擺桿轉(zhuǎn)動(dòng),擺桿另一端與負(fù)載轉(zhuǎn)動(dòng)軸固連能帶動(dòng)負(fù)載轉(zhuǎn)動(dòng)軸轉(zhuǎn)動(dòng);粗調(diào)凸輪的輪廓線上開設(shè)六個(gè)能與擺桿凸塊嚙合的定位槽,保證擺桿與粗調(diào)凸輪接觸位置。精調(diào)凸輪安裝主動(dòng)不完全齒輪,可與從動(dòng)不完全齒輪相互嚙合帶動(dòng)從動(dòng)不完全齒輪間歇轉(zhuǎn)動(dòng),主動(dòng)不完全齒輪轉(zhuǎn)動(dòng)一周從動(dòng)不完全齒輪間歇轉(zhuǎn)動(dòng)一個(gè)角度,不完全齒輪脫離后,精調(diào)凸輪可以推動(dòng)滑塊滑動(dòng);負(fù)載轉(zhuǎn)動(dòng)軸安裝扭簧保證各結(jié)構(gòu)可靠接觸。傳動(dòng)機(jī)構(gòu)簡圖如圖1所示。
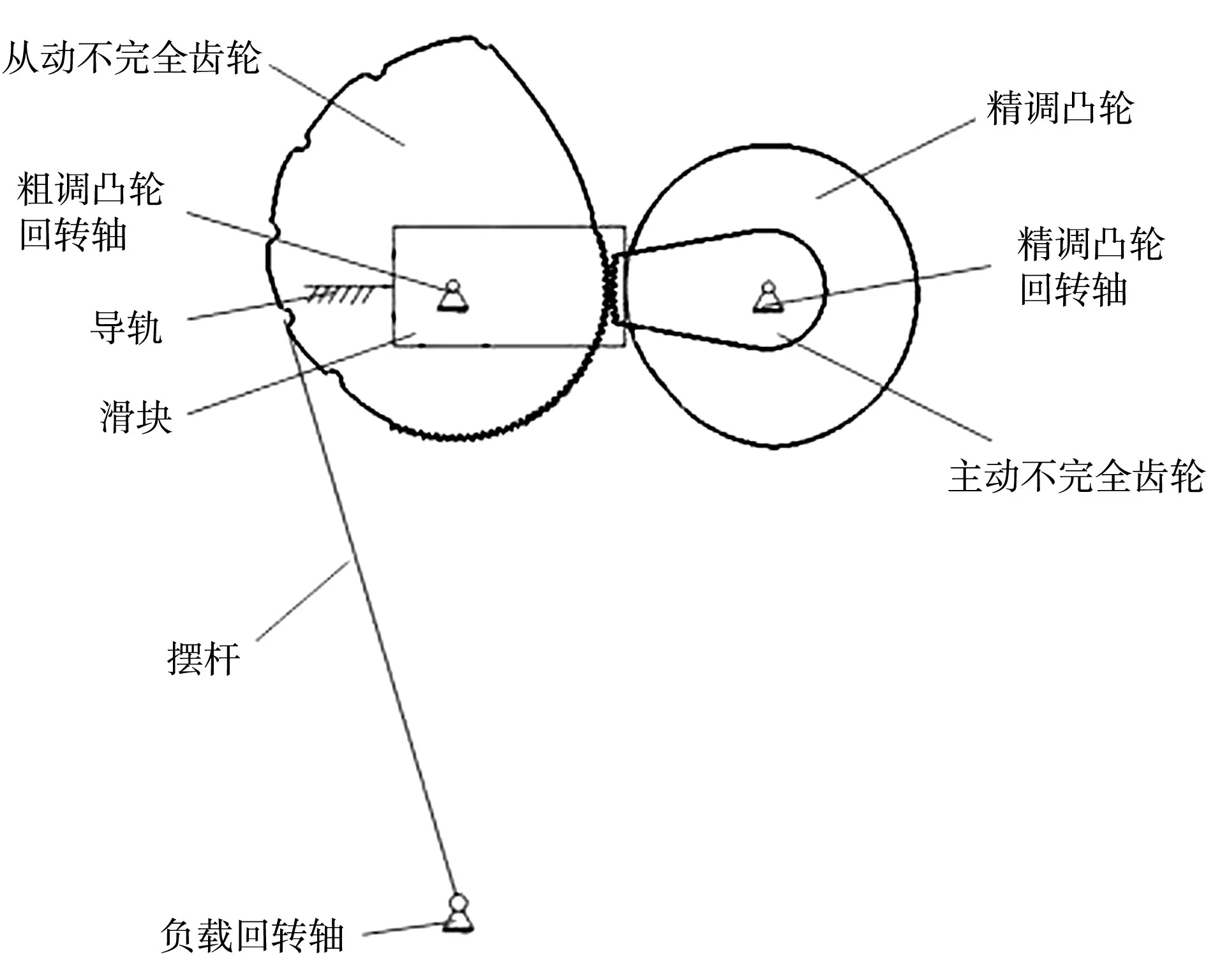
圖1 傳動(dòng)機(jī)構(gòu)簡圖
1.2 轉(zhuǎn)動(dòng)軸調(diào)整原理
任務(wù)需求系統(tǒng)轉(zhuǎn)動(dòng)軸調(diào)整范圍為±5°,指向精度要求為50μrad,設(shè)計(jì)時(shí)傳動(dòng)系統(tǒng)的調(diào)整范圍留取一定余量設(shè)計(jì)為11°。調(diào)整時(shí)負(fù)載軸內(nèi)角度傳感器實(shí)時(shí)測量轉(zhuǎn)動(dòng)軸角度。
該傳動(dòng)機(jī)構(gòu)分為粗調(diào)整和精調(diào)整。
(1)粗調(diào)整:
精調(diào)凸輪轉(zhuǎn)動(dòng),主動(dòng)不完全齒輪和從動(dòng)不完全齒輪嚙合,精調(diào)凸輪通過不完全齒輪帶動(dòng)粗調(diào)凸輪轉(zhuǎn)動(dòng),精調(diào)凸輪推動(dòng)擺桿,擺桿帶動(dòng)負(fù)載轉(zhuǎn)動(dòng)軸轉(zhuǎn)動(dòng)。每次粗調(diào)推動(dòng)擺桿變化1.8°,粗調(diào)整可連續(xù)進(jìn)行五次,對擺桿進(jìn)行9°的調(diào)整。
(2)精調(diào)整:
主動(dòng)不完全齒輪和從動(dòng)不完全齒輪脫離,精調(diào)凸輪繼續(xù)轉(zhuǎn)動(dòng)推動(dòng)滑塊,滑塊帶動(dòng)粗調(diào)凸輪沿導(dǎo)軌滑動(dòng),粗調(diào)凸輪推動(dòng)擺桿擺桿帶動(dòng)負(fù)載轉(zhuǎn)動(dòng)軸轉(zhuǎn)動(dòng)。精調(diào)整為連續(xù)調(diào)整,調(diào)整范圍2°。由負(fù)載軸角度傳感器實(shí)時(shí)測量轉(zhuǎn)軸角度。到達(dá)所需角度時(shí)完成精調(diào),電機(jī)掉電精調(diào)凸輪停止轉(zhuǎn)動(dòng),機(jī)構(gòu)自鎖。因此系統(tǒng)調(diào)整精度由角度傳感器決定,系統(tǒng)傳感器精度優(yōu)于2"。
2 傳動(dòng)機(jī)構(gòu)設(shè)計(jì)
2.1 機(jī)構(gòu)結(jié)構(gòu)參數(shù)設(shè)計(jì)
傳動(dòng)機(jī)構(gòu)運(yùn)動(dòng)模型如圖2所示。O1為精調(diào)凸輪轉(zhuǎn)動(dòng)軸,O2為粗調(diào)凸輪轉(zhuǎn)動(dòng)軸,O3為負(fù)載轉(zhuǎn)動(dòng)軸,定位槽接觸點(diǎn)為A,A與O3之間的距離為l1,O2與O3之間的距離為l3,A與O2之間的距離為l2。粗調(diào)整階段粗調(diào)凸輪只繞轉(zhuǎn)動(dòng)軸O2轉(zhuǎn)動(dòng)不沿導(dǎo)軌滑動(dòng),l1、l3保持不變?yōu)?2mm,隨著粗調(diào)凸輪轉(zhuǎn)動(dòng),l2發(fā)生變化,從而改變擺桿的角度。
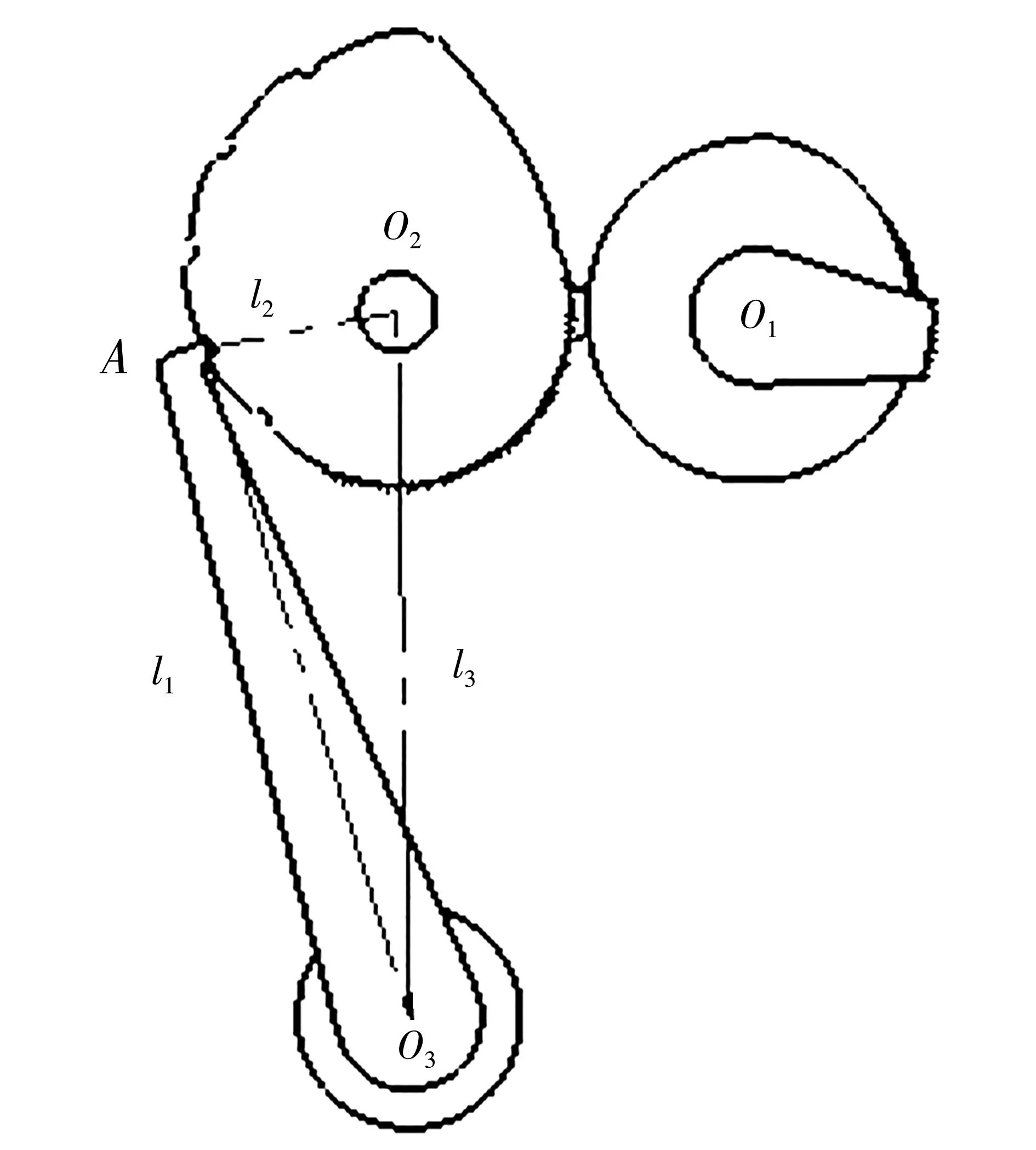
圖2 傳動(dòng)機(jī)構(gòu)運(yùn)動(dòng)模型
根據(jù)余弦定理有:

當(dāng)擺桿處于第一個(gè)定位槽時(shí),擺桿的初始角度為:

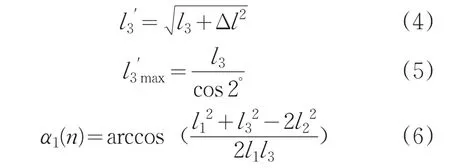
則不同定位槽處輪廓線高度為:

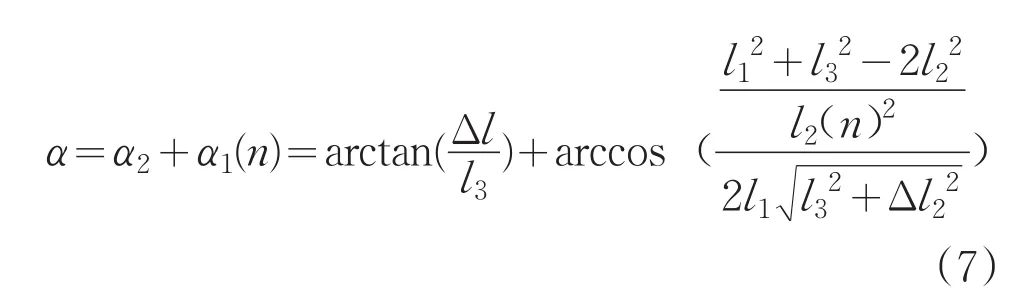
進(jìn)行精調(diào)整時(shí),精調(diào)凸輪推動(dòng)滑塊帶動(dòng)粗調(diào)凸輪沿導(dǎo)軌滑動(dòng),轉(zhuǎn)動(dòng)軸O2沿水平方向變化,變化后O2與 O1的間距變化量 Δl=l4?tanα2。其中l(wèi)4為O2O1與負(fù)載轉(zhuǎn)動(dòng)軸O3的距離設(shè)計(jì)為72mm,精調(diào)整范圍為2°,經(jīng)計(jì)算精調(diào)凸輪升程為2.52mm。精調(diào)凸輪推動(dòng)粗調(diào)凸輪滑動(dòng)的同時(shí),O2與O3的間距l(xiāng)3會(huì)發(fā)生改變,引起擺桿角度α1(n)的微小變化:
定位槽輪廓線高度以及粗調(diào)位置時(shí)精調(diào)引起的粗調(diào)角度變化見表1所示。
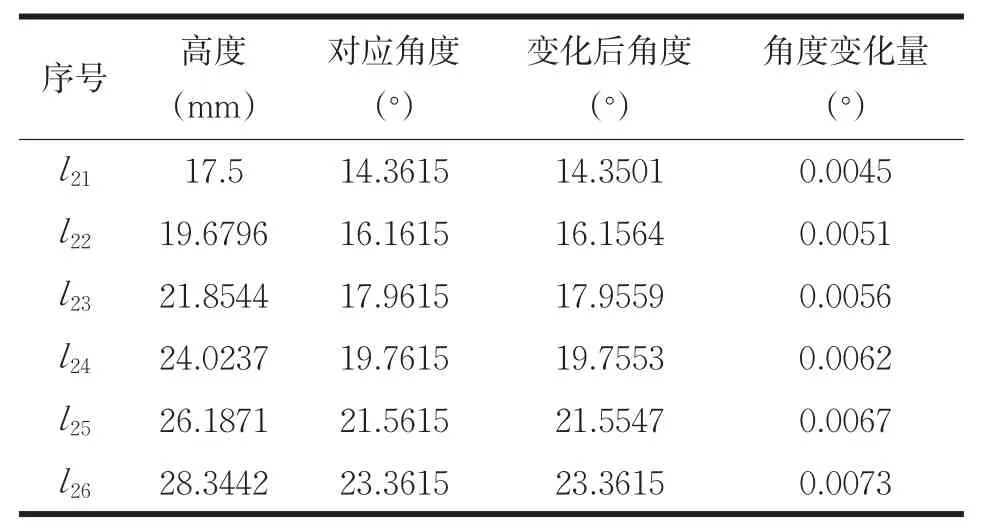
表1 粗調(diào)凸輪定位槽高度及角度變化
計(jì)算表明,進(jìn)行精調(diào)時(shí)粗調(diào)角度會(huì)發(fā)生微小變化影響系統(tǒng)調(diào)整角度,但角度變化量較小完全可以由精調(diào)凸輪微調(diào)進(jìn)行補(bǔ)償,對系統(tǒng)精度沒有影響。
系統(tǒng)最終調(diào)整角度變化量為:
通過MATLAB對其進(jìn)行仿真,仿真結(jié)果如圖3所示。從仿真曲線中可以看出隨著精調(diào)凸輪的轉(zhuǎn)動(dòng),被調(diào)整的轉(zhuǎn)動(dòng)軸角度成單調(diào)遞增變化,并且每次粗調(diào)斷點(diǎn)處角度具有重疊,保證在整個(gè)行程上可以在任意位置調(diào)整。
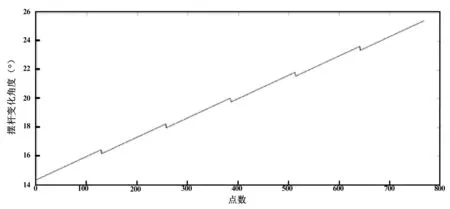
圖3 傳動(dòng)機(jī)構(gòu)運(yùn)動(dòng)仿真曲線
2.2 凸輪輪廓設(shè)計(jì)
推程運(yùn)動(dòng)角越大系統(tǒng)調(diào)整分辨率越高。經(jīng)優(yōu)化后確定精調(diào)凸輪基圓直徑35mm,系統(tǒng)推程運(yùn)動(dòng)角為300°,回程運(yùn)動(dòng)角為33°,不完全齒輪嚙合范圍27°,在嚙合范圍內(nèi)精調(diào)凸輪輪廓線為圓形,保證兩不完全齒輪可靠嚙合并帶動(dòng)粗調(diào)凸輪轉(zhuǎn)動(dòng)。
粗調(diào)凸輪設(shè)計(jì)為5步粗調(diào)整,每步粗調(diào)范圍1.8°,升程范圍135°;粗調(diào)范圍為不完全齒輪嚙合范圍,基圓直徑35mm。
因?yàn)榇终{(diào)凸輪為間歇跳步調(diào)整,所以粗調(diào)凸輪升程輪廓線設(shè)計(jì)為分段結(jié)構(gòu),輪廓線曲線為:

在粗調(diào)凸輪輪廓線上設(shè)計(jì)有定位槽保證擺桿與粗調(diào)凸輪可靠定位。
電機(jī)選用步距角1.8°的步進(jìn)電機(jī),采用32細(xì)分實(shí)現(xiàn)0.05625°的步距角。擺桿長度72mm,傳動(dòng)機(jī)構(gòu)設(shè)計(jì)分辨率為1.5"。
傳動(dòng)機(jī)構(gòu)三維模型如圖4所示。
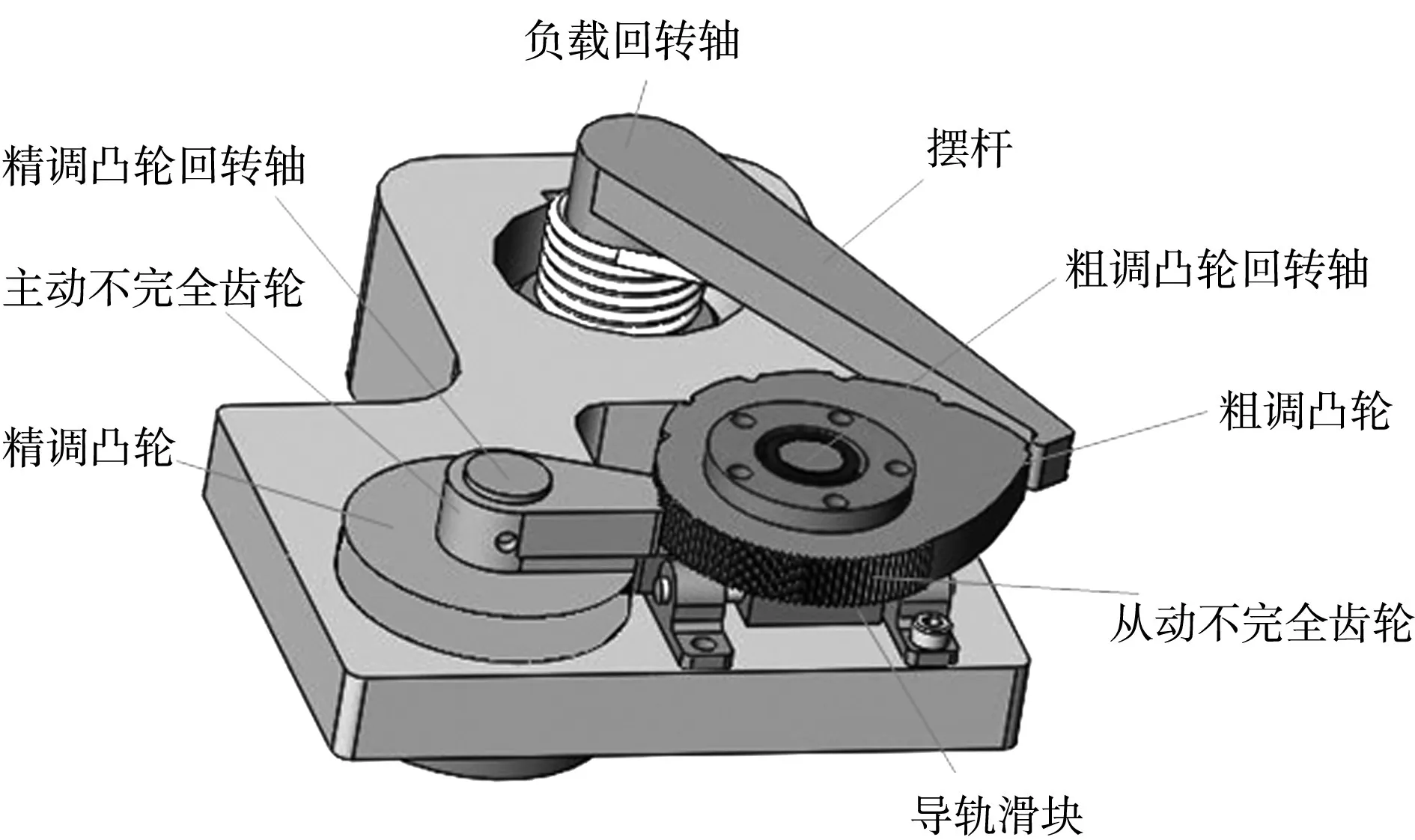
圖4 傳動(dòng)機(jī)構(gòu)三維模型
該傳動(dòng)機(jī)構(gòu)的主要部件參數(shù)如表2所示。

表2 主要部件參數(shù)
3 傳動(dòng)機(jī)構(gòu)力學(xué)分析
3.1 系統(tǒng)自鎖性能分析
凸輪機(jī)構(gòu)的壓力角為滑塊所受正壓力方向與滑塊與凸輪接觸點(diǎn)A的速度方向之間所夾銳角,其壓力角為:
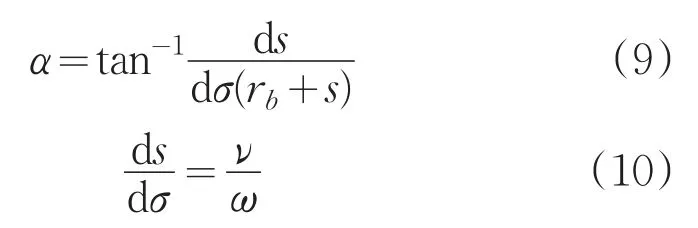
經(jīng)計(jì)算精調(diào)凸輪最大壓力角為40.6°,式中rb為基圓半徑,s為升程。
以精調(diào)凸輪建立數(shù)學(xué)模型如圖5所示:Oxy為直角坐標(biāo)系,接觸點(diǎn)為A,Mk為電機(jī)靜力矩,F(xiàn)n為滑塊作用于凸輪的正壓力,F(xiàn)μ為凸輪和滑塊間的摩擦力,L、R分別為原點(diǎn)O與滑塊接觸面和接觸點(diǎn)A的距離,θ為壓力角。
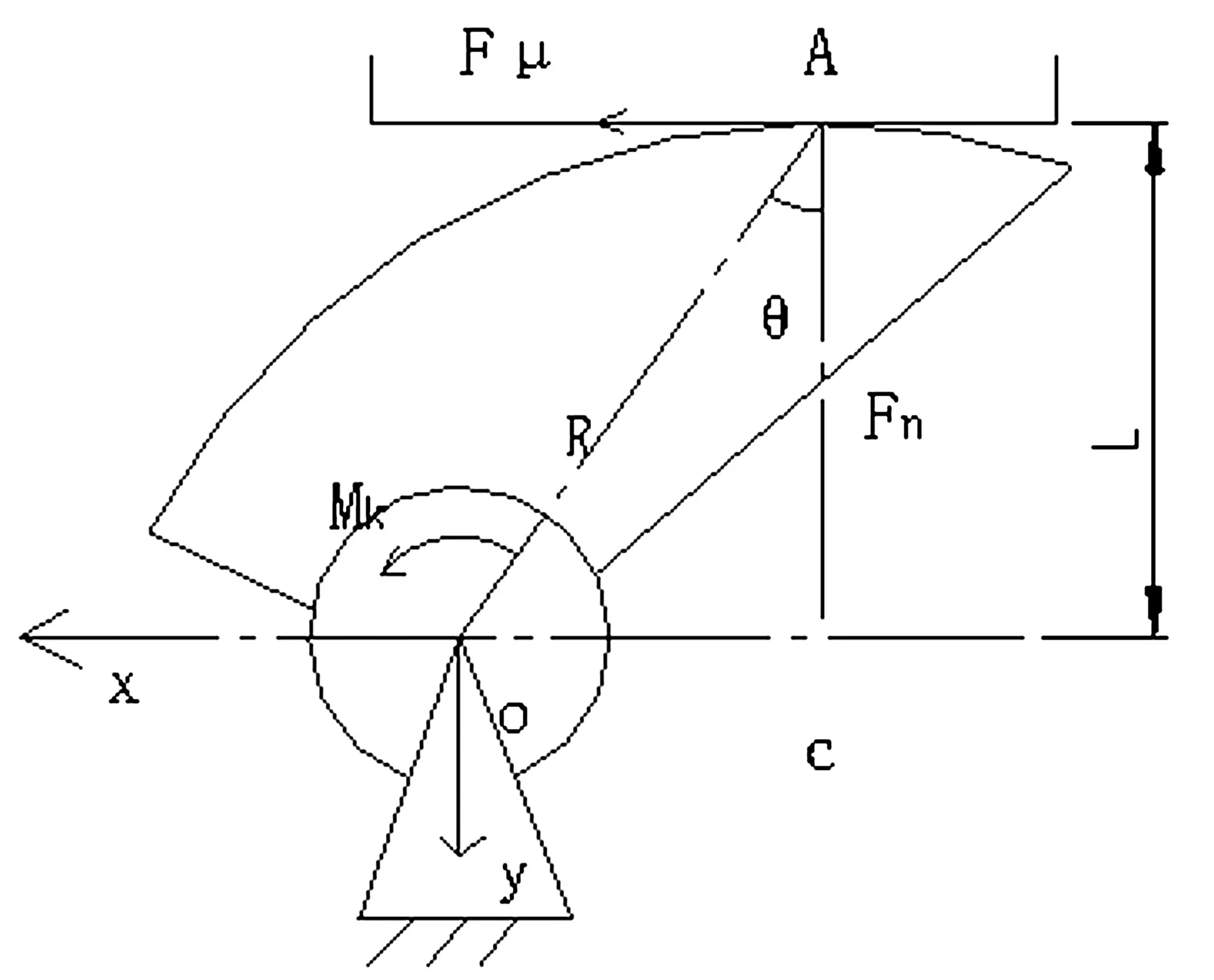
圖5 精調(diào)凸輪受力分析圖
電機(jī)靜轉(zhuǎn)矩對凸輪的作用力為:

所以外力對凸輪轉(zhuǎn)動(dòng)中心的作用力矩為
當(dāng)MW<0時(shí),系統(tǒng)依靠本身內(nèi)部摩擦力即可實(shí)現(xiàn)自鎖;當(dāng)0<MW<Mk時(shí),電機(jī)靜力矩可以保證自鎖;當(dāng)Mk<MW時(shí),凸輪無法自鎖。鍍MOS2表面干膜的靜摩擦系數(shù)為0.15。帶入公式可知MW=-0.123<0。所以系統(tǒng)靠自身摩擦即可實(shí)現(xiàn)自鎖。
3.2 電機(jī)扭矩分析
扭簧的目的是在平臺(tái)振動(dòng)和擾動(dòng)條件下保證擺桿和粗調(diào)凸輪可以可靠接觸,確保系統(tǒng)調(diào)整的準(zhǔn)確性。根據(jù)結(jié)構(gòu)設(shè)計(jì),系統(tǒng)在振動(dòng)下產(chǎn)生的轉(zhuǎn)動(dòng)力矩約為0.4N·M,所以扭簧最小回復(fù)扭力選取為0.4N·M,在調(diào)整范圍內(nèi)扭力變化為0.1N·M。
由扭簧扭力產(chǎn)生的滑塊滑動(dòng)方向上的推力為:

在整個(gè)粗調(diào)整的過程中,擺桿凸塊所處定位槽位置不同,∠AO3O2大小也在不斷變化,機(jī)構(gòu)角度分析如圖6所示。
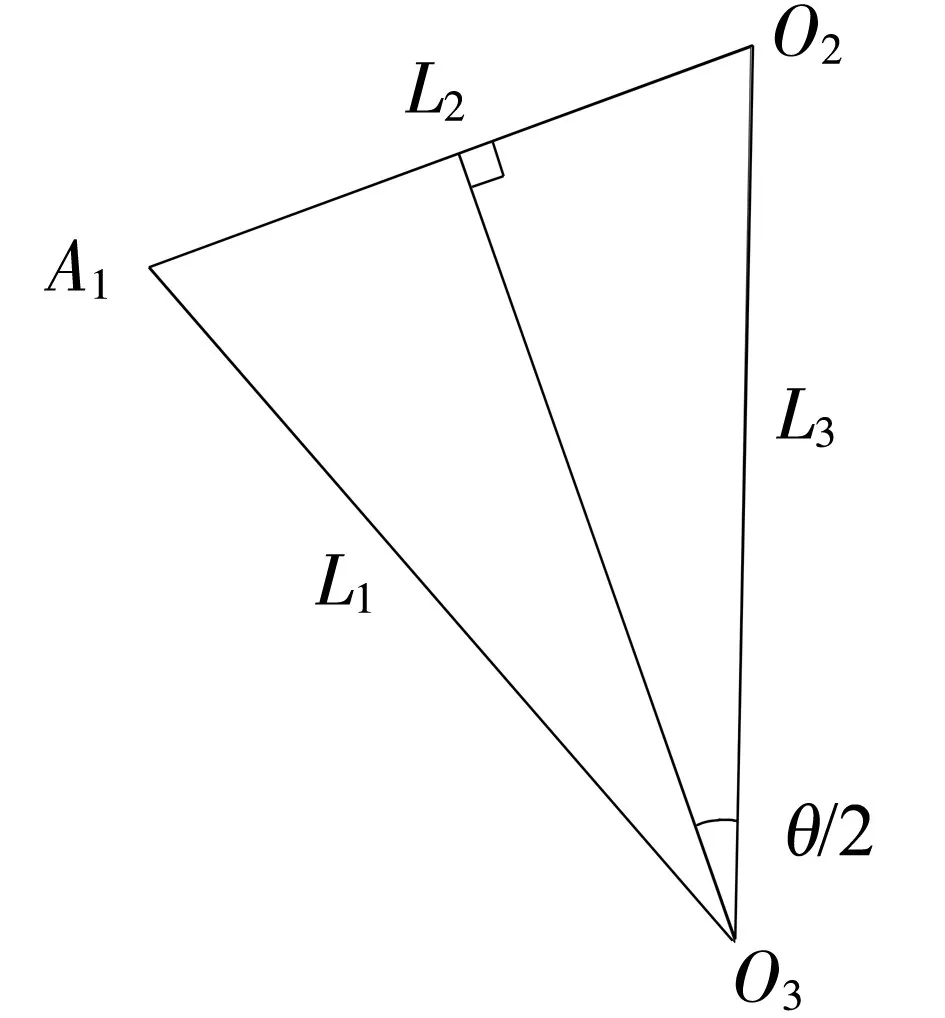
圖6 機(jī)構(gòu)角度分析圖
(1)精調(diào)整
傳動(dòng)系統(tǒng)在對轉(zhuǎn)動(dòng)軸進(jìn)行調(diào)整時(shí)其受力分析如圖7所示。Mf為負(fù)載轉(zhuǎn)動(dòng)所需扭矩,最大為0.5N?M,扭簧扭矩最大為0.5N?M;B為精調(diào)凸輪與滑塊的接觸點(diǎn),C為初始時(shí)精調(diào)凸輪與滑塊的接觸點(diǎn),θ為壓力角。
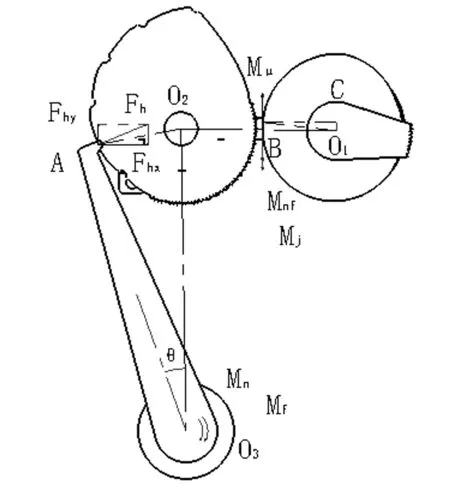
圖7 精調(diào)整時(shí)機(jī)構(gòu)受力分析
在Mf和Mn的作用下,擺桿對滑塊的作用力Fh。

在Mf和Mn的作用下,擺桿對滑塊的作用力Fn在滑塊滑動(dòng)方向的分力為Fhx。

當(dāng)θ=14.36°時(shí),F(xiàn)hx=1.345N ;
當(dāng)θ=24.05°時(shí),F(xiàn)hx=1.268N;
精調(diào)凸輪所需扭矩為:

同時(shí),精調(diào)凸輪還需要克服壓力Fhx產(chǎn)生的摩擦力矩Mμ。

所以精調(diào)凸輪電機(jī)所需要的扭矩為:

經(jīng)過計(jì)算得:
θ=14.36°時(shí),Mj=0.278N?M ;
θ=24.05°時(shí),Mj=0.262N?M;
設(shè)精調(diào)凸輪電機(jī)所需要的扭矩力為FD;

當(dāng)θ=14.36°時(shí),F(xiàn)D=1.544N;
當(dāng)θ=24.05°時(shí),F(xiàn)D=1.456N ;
(2)粗調(diào)整
粗調(diào)凸輪受力分析如圖8所示。
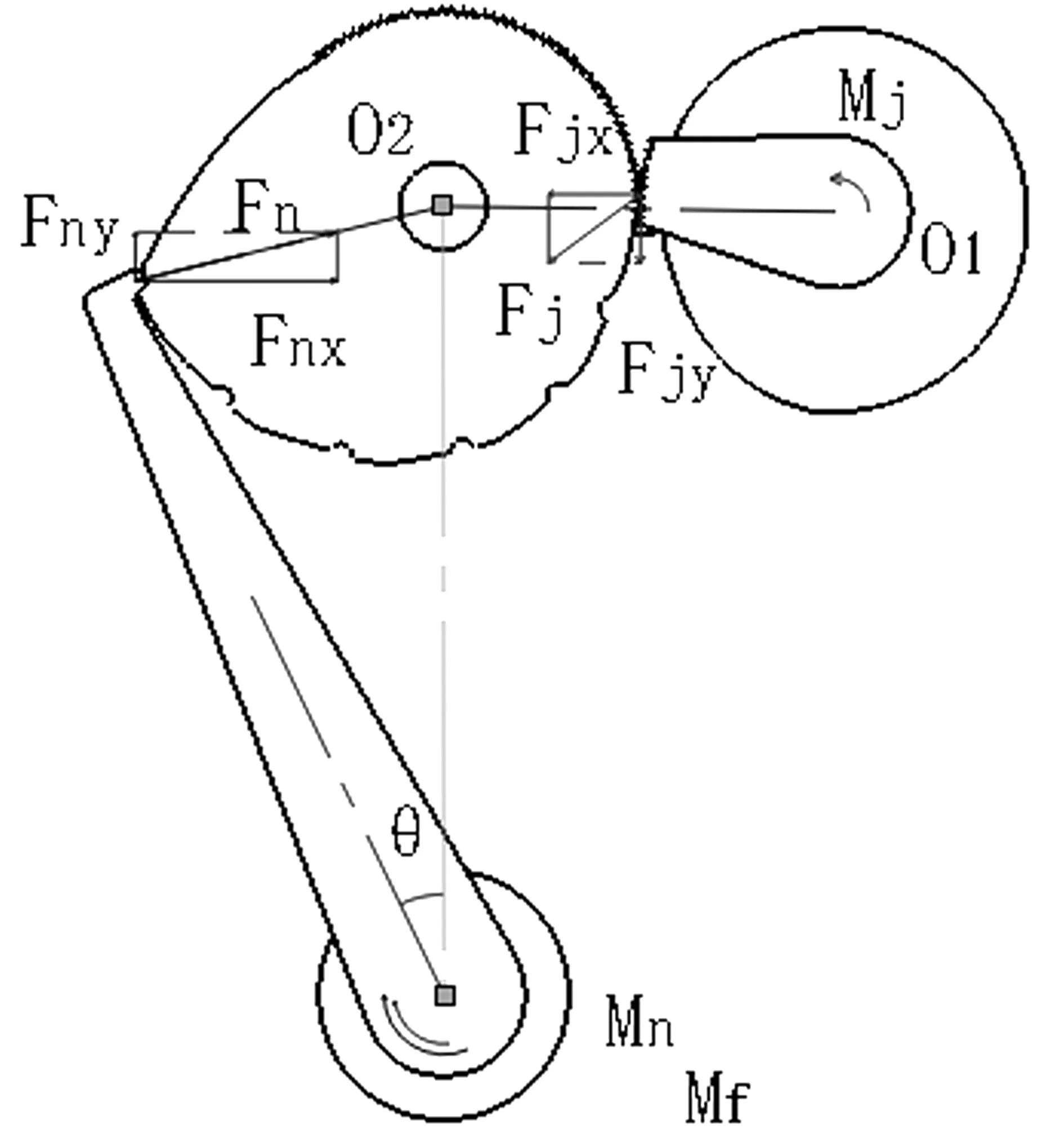
圖8 粗調(diào)整時(shí)機(jī)構(gòu)受力分析
設(shè)粗調(diào)凸輪定位槽不存在時(shí),擺桿與粗調(diào)凸輪的接觸方式為線面接觸。
擺桿對滑塊作用力Fh在滑塊滑動(dòng)垂直方向的分力為:

當(dāng)θ=14.36°時(shí),F(xiàn)hy=0.345N;
當(dāng)θ=24.05°時(shí),F(xiàn)hy=0.567N;
根據(jù)受力平衡原理得:
精調(diào)凸輪還需要克服壓力Fhy產(chǎn)生扭矩Mjy為:

因此,經(jīng)過計(jì)算可以得出:
θ=14.36°時(shí),Mjy=0.062N?M
θ=24.05°時(shí),Mjy=0.102N?M
同時(shí),精調(diào)凸輪還需要克服壓力Fhx產(chǎn)生的摩擦力矩Mμ。

θ=14.36°時(shí),Mμ=0.036N?M ;
θ=24.05°時(shí),Mμ=0.034N?M ;
精調(diào)凸輪電機(jī)所需要的扭矩Mjx為:

因此,經(jīng)過計(jì)算可以得出:
θ=14.36°時(shí),Mjx=0.242N?M
θ=24.05°時(shí),Mjx=0.228N?M
根據(jù)勾股定理可求得電機(jī)所需要的扭矩為:

θ=14.36°時(shí),Mj=0.243N?M;
θ=24.05°時(shí),Mj=0.250N?M;
設(shè)精調(diào)凸輪電機(jī)所需要的扭矩力為FD;
當(dāng)θ=14.36°時(shí),F(xiàn)D=1.35N;
當(dāng)θ=24.05°時(shí),F(xiàn)D=1.389N ;
(3)定位槽
粗調(diào)整時(shí)因粗調(diào)凸輪存在定位槽。現(xiàn)僅對擺桿從定位槽中脫離時(shí)進(jìn)行受力分析。
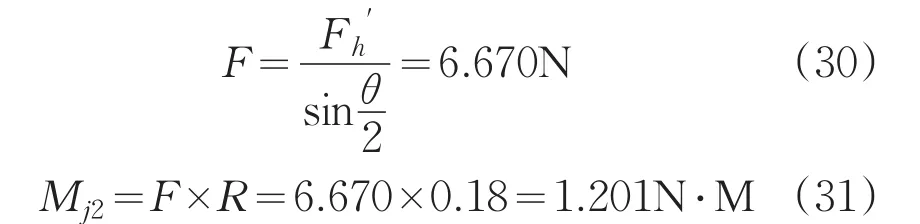
當(dāng)主動(dòng)軸逆時(shí)針轉(zhuǎn)動(dòng)時(shí),機(jī)構(gòu)可等效成如圖9所示的結(jié)構(gòu)。
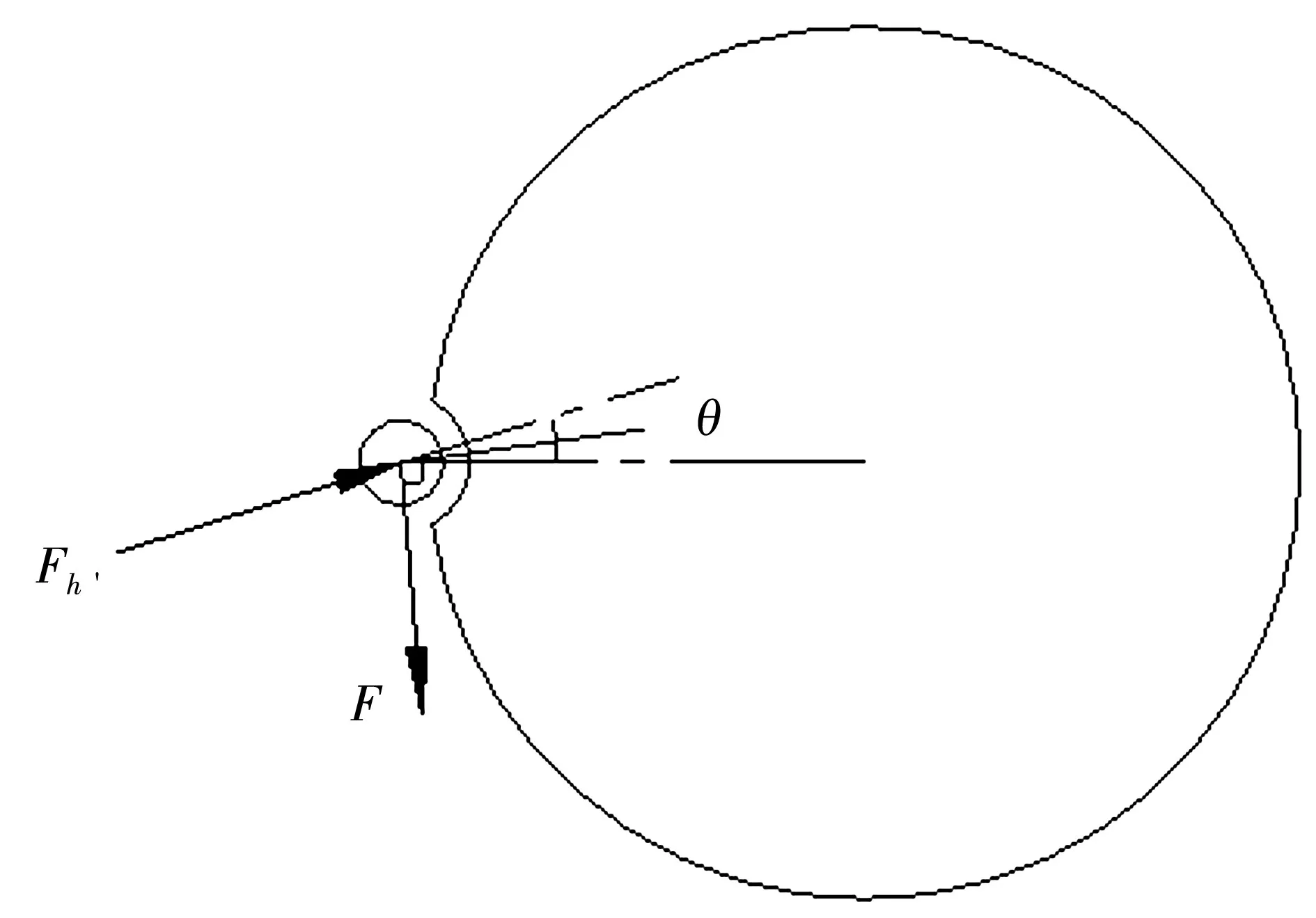
圖9 等效機(jī)構(gòu)受力分析圖
在主動(dòng)軸逆時(shí)針轉(zhuǎn)動(dòng)時(shí),F(xiàn)為受力方向是沿切線方向向下的力。

因θ范圍在 14.36°~24.05°之間,所以θmin=14.36°,θmax=24.05 。
當(dāng)θ=14.36°時(shí),

當(dāng)θ=24.05°時(shí),
在主動(dòng)軸順時(shí)針轉(zhuǎn)動(dòng)時(shí),F(xiàn)為凹槽對小球的作用力,受力方向是沿切線方向向上。受力情況如圖10所示,受力分解圖如下圖11所示。
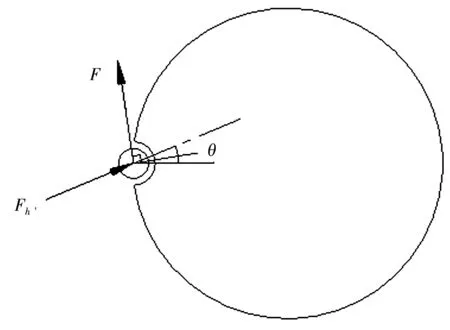
圖10 等效機(jī)構(gòu)受力分析圖

當(dāng)θ=14.36°時(shí),F(xiàn)=10.766N,

當(dāng)θ=24.05°時(shí),F(xiàn)=6.091N

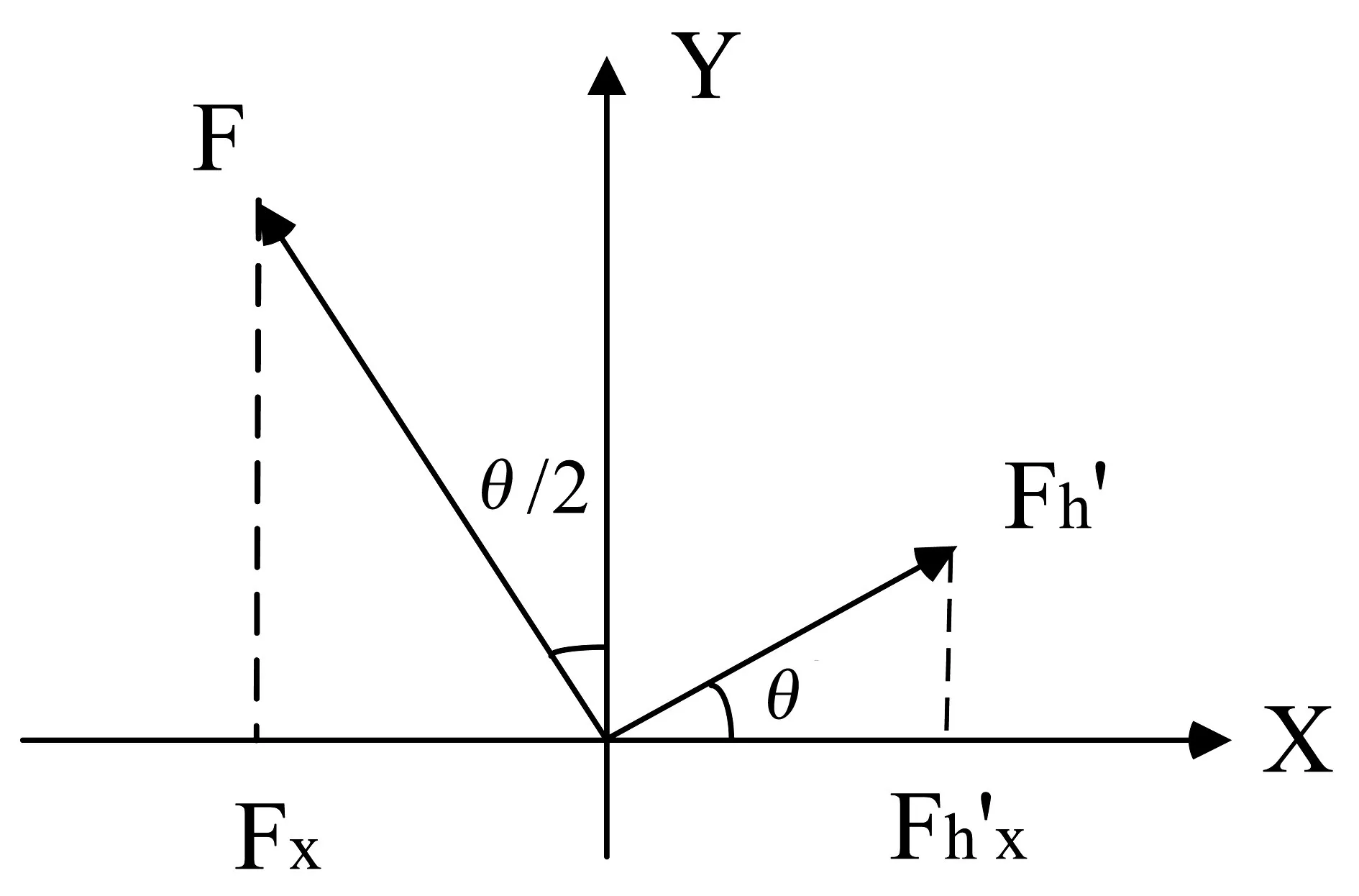
圖11 等效機(jī)構(gòu)受力分解圖
綜上所述,凹槽處所需要的扭矩最大為
3.3 運(yùn)動(dòng)仿真分析
利用運(yùn)動(dòng)分析軟件對機(jī)構(gòu)進(jìn)行了運(yùn)動(dòng)仿真,仿真時(shí)設(shè)置精調(diào)凸輪以5轉(zhuǎn)/秒的速度均速轉(zhuǎn)動(dòng),擺桿轉(zhuǎn)動(dòng)角度仿真結(jié)果如圖12所示。
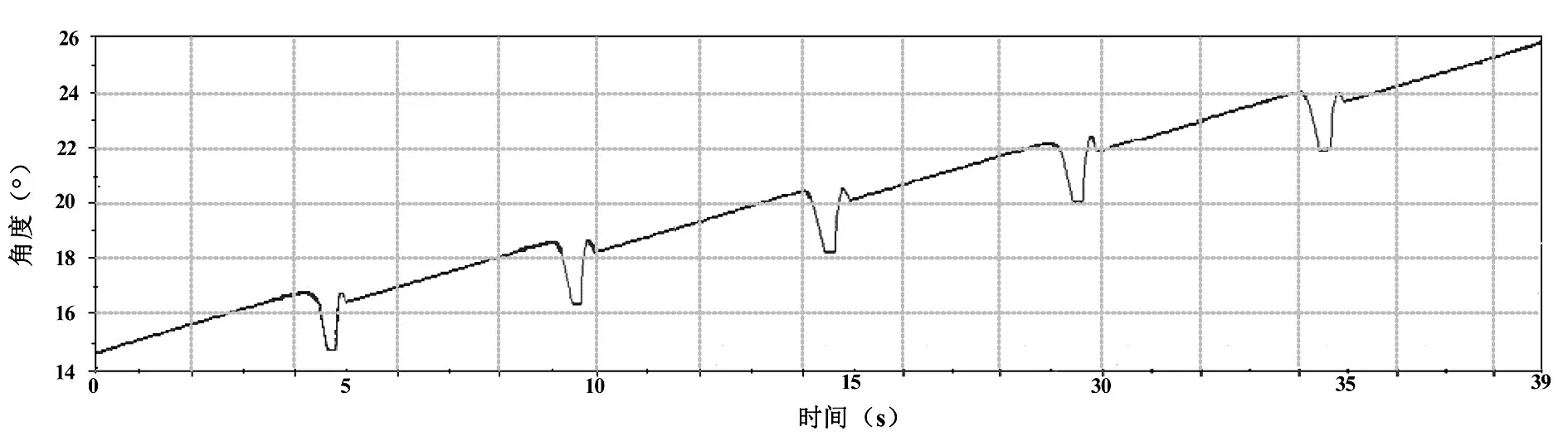
圖12 調(diào)整機(jī)構(gòu)調(diào)整角度變化仿真曲線
可見,在六個(gè)轉(zhuǎn)動(dòng)周期內(nèi)傳動(dòng)機(jī)構(gòu)可實(shí)現(xiàn)的角度調(diào)整范圍為11°。精調(diào)凸輪每轉(zhuǎn)動(dòng)一周擺桿完成2°的調(diào)整,并且調(diào)整角度和凸輪轉(zhuǎn)動(dòng)成線性關(guān)系,在精調(diào)凸輪回程內(nèi)擺桿角度回到本次精調(diào)的初始角度。精調(diào)凸輪繼續(xù)轉(zhuǎn)動(dòng)帶動(dòng)粗調(diào)凸輪旋轉(zhuǎn),擺桿進(jìn)行一次大范圍粗調(diào)整,每次粗調(diào)范圍為1.8°,粗調(diào)過程中擺桿角度變化曲線出現(xiàn)的尖峰是由擺桿凸塊與粗調(diào)凸輪定位槽的脫離和嚙合造成的,可以在控制軟件中予以屏蔽,消除角度跳變對控制系統(tǒng)判讀的影響。每周期起始時(shí)的負(fù)載轉(zhuǎn)動(dòng)軸角度略小于上一周期結(jié)束時(shí)負(fù)載轉(zhuǎn)動(dòng)軸調(diào)整到任意角度。
4 結(jié)論
根據(jù)GEO-地粗跟蹤系統(tǒng)的要求,設(shè)計(jì)了雙凸輪和不完全齒輪傳動(dòng)機(jī)構(gòu)。該機(jī)構(gòu)可實(shí)現(xiàn)11°范圍內(nèi)角度的調(diào)整,分辨率為1.5"。在保證傳動(dòng)精度的同時(shí)能夠通過自鎖從而降低系統(tǒng)的功耗,提高系統(tǒng)的使用壽命。