基于剛體導(dǎo)引的連桿式空間約束舉升機構(gòu)設(shè)計
2019-09-02 06:51:18袁偉亮龍忠杰李宏亮
兵器裝備工程學(xué)報 2019年8期
關(guān)鍵詞:設(shè)計
蘇 鵬,袁偉亮,龍忠杰,李宏亮,楊 洋
(1.北京信息科技大學(xué) 機電工程學(xué)院, 北京 100192;2.國家康復(fù)輔具研究中心 民政部智能控制與康復(fù)技術(shù)重點實驗室, 北京 100176;3.中國北方車輛研究所, 北京 100072; 4.北京航空航天大學(xué) 機械工程及自動化學(xué)院,北京 100191)
連桿機構(gòu)為機械系統(tǒng)的重要組成部分,其可在各種各樣的使用環(huán)境中,實現(xiàn)所期望的多種運動規(guī)律與運動軌跡要求。四連桿機構(gòu)為一種最具代表性的連桿機構(gòu),結(jié)構(gòu)簡單、易于制造、成本低廉,并具有較高的工作可靠性,廣泛應(yīng)用于機器人、液壓系統(tǒng)、車輛等機械自動化系統(tǒng)中。
連桿機構(gòu)綜合設(shè)計的主要問題為對于機構(gòu)運動簡圖的設(shè)計,傳統(tǒng)的連桿機構(gòu)綜合方法可分為軌跡發(fā)生、函數(shù)發(fā)生和剛體導(dǎo)引3種方法。傳統(tǒng)的連桿機構(gòu)設(shè)計方法存在不夠直觀、計算工作量大等問題[1-4],制約著連桿機構(gòu)的實際應(yīng)用,許多學(xué)者探索應(yīng)用現(xiàn)代設(shè)計軟件或計算軟件進(jìn)行連桿機構(gòu)設(shè)計[4],并將現(xiàn)代智能算法引入到四桿機構(gòu)的優(yōu)化中[5-6]。
彈藥自動裝填系統(tǒng)是現(xiàn)代乃至未來火炮發(fā)展的重要方向,舉升機構(gòu)是自動裝填系統(tǒng)中彈殼自動收拋裝置的重要組成部分。目前現(xiàn)有的舉升機構(gòu)多用于裝載機、裝卸車、飛機牽引車等特種車輛,鮮見有應(yīng)用于彈藥自動裝填系統(tǒng),并且現(xiàn)有的舉升機構(gòu)設(shè)計復(fù)雜、占用空間大,未考慮空間約束避讓的設(shè)計要求,研究多集中于虛擬仿真運動、受力分析等[7-8]。針對某新型裝甲車輛整體式彈殼自動收拋裝置的運動要求,提出一種基于剛體導(dǎo)引的連桿式空間約束舉升機構(gòu)設(shè)計方法,基于三個剛體引導(dǎo)位置的連桿機構(gòu)計算理論,把四連桿機構(gòu)設(shè)計問題簡化為二桿組的求解問題,并借助Matlab進(jìn)行連桿參數(shù)計算,完成四連桿舉升機構(gòu)構(gòu)型,通過設(shè)計分析及實際機構(gòu)驗證,證明了所提出方法的可行性,解決了傳統(tǒng)方法對常見的連桿機構(gòu)進(jìn)行構(gòu)型與分析的繁瑣問題。
1 剛體引導(dǎo)的連桿式空間約束機構(gòu)數(shù)學(xué)建模
基于剛體導(dǎo)引法進(jìn)行四桿機構(gòu)設(shè)計時,應(yīng)確定在運動平面上的一組點的位置,當(dāng)平面處于所給定的某些位置時,這些點將處于一個圓弧上,即構(gòu)成圓弧約束。
基于平面連桿機構(gòu)的結(jié)構(gòu)形式,可借助曲柄搖桿機構(gòu)進(jìn)行分析平面連桿機構(gòu)模型如圖1,AA1BB1構(gòu)成一個封閉鏈,AA1為曲柄,BB1為擺桿[9]。對于平面連桿機構(gòu)而言,其可以分解為一系列的連桿組,如包含回轉(zhuǎn)副的鉸鏈連桿組r1、r2,其構(gòu)成二桿矢量圖,在坐標(biāo)系O-xy中,定義A點坐標(biāo)為(xA,yA),r1的幅角為(φ0+Δφi),r2的幅角為(δ0+Δδi)。
通過對連桿上的點P的計算可實現(xiàn)連桿運動軌跡的綜合。剛體導(dǎo)引的精確位置Pi(i=1,2,3…,n),存在運動方程

(1)
對于交點A1,存在
(2)
由式(1),可得
(3)
當(dāng)給定的位置數(shù)為n時,則式(3)含有n個方程式。在剛體導(dǎo)引機構(gòu)的設(shè)計中,剛體的n個精確位置是給定的,故式中xPi、yPi和Δδi是已知值,而待求的機構(gòu)參數(shù)為r1、r2、xA、yA和δ0。
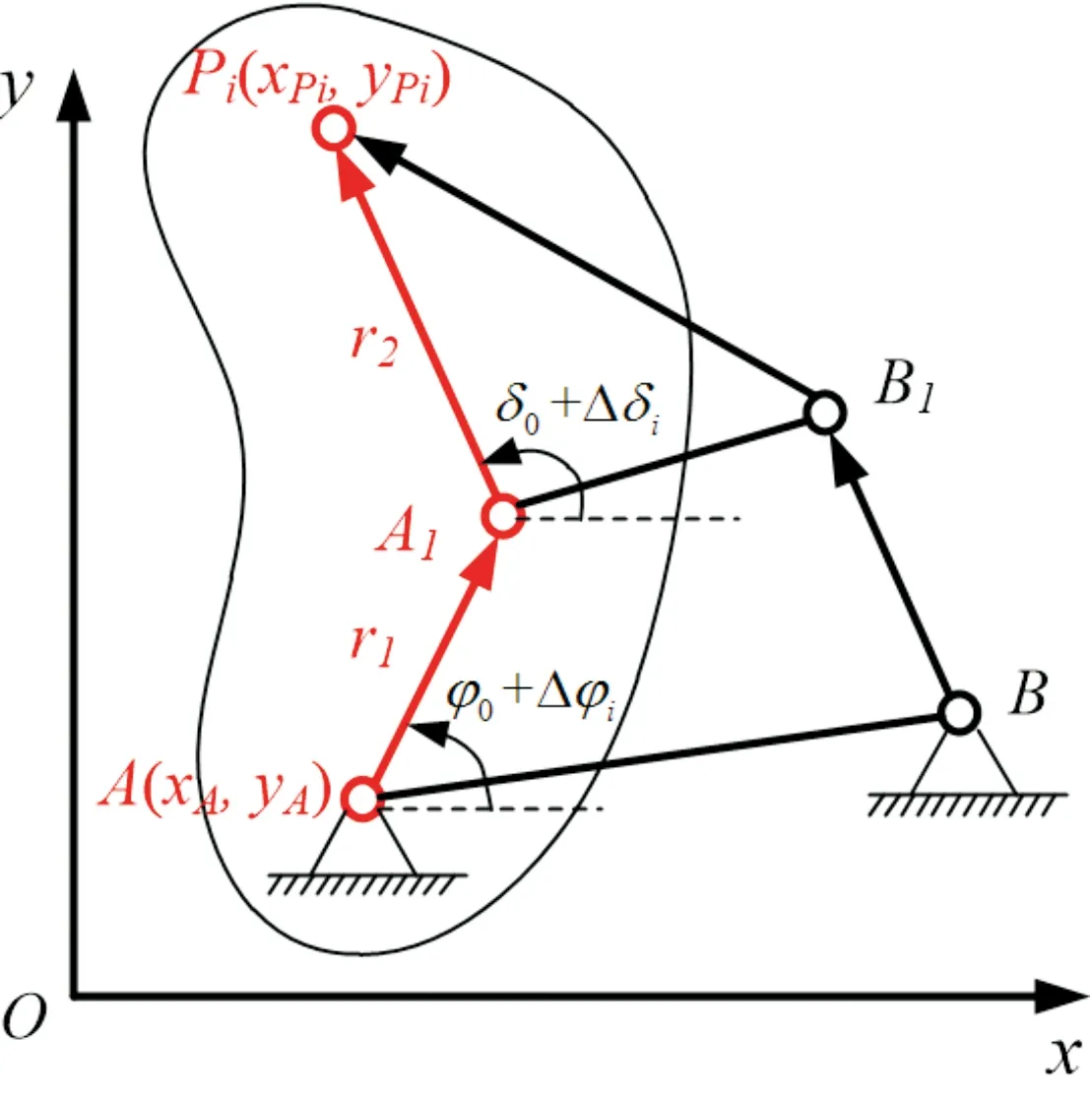
圖1 平面連桿機構(gòu)模型
基于某新型裝甲車輛自動裝填系統(tǒng)中整體式彈殼自動收拋裝置的功能要求,舉升連桿機構(gòu)帶動收殼器運動,考慮連桿及收殼器的空間約束,確定收殼位置,即自動收拋裝置的三個剛性導(dǎo)引位置。舉升機構(gòu)空間約束位置示意圖如圖2。為簡化計算,令A(yù)點為坐標(biāo)原點。圖中,位置1-5為收拋裝置假想的運動位置,其中,
1) 運動位置1為裝置處于收殼狀態(tài),其整體須位于炮膛后座線下方,并且在規(guī)定的俯仰角范圍內(nèi),收殼器與吊籃底面、后防危板不干涉,確定第一個剛性導(dǎo)引位置P1;
2) 運動位置2為位置1、3的中間運動位置;
3) 收殼器在整個運動過程中,與炮膛端面不干涉,取運動空間中的剛性導(dǎo)引位置P2,其為與炮膛端面最為接近的運動極限點,確定運動位置3;
4) 根據(jù)彈殼與拋殼口位置的對接和最佳的拋射角度確定拋射姿態(tài),且與彈殼頂部與拋殼口不干涉,以此確定運動位置4及剛性導(dǎo)引位置P3;
5) 運動位置5為最終運動位置,即拋殼位置,此時彈殼伸出拋殼口,且收殼器接近頂面。
其中:L為錨桿長度,m;L1為錨桿錨入穩(wěn)定巖層深度,一般長度取1.0 m;L2為錨桿的有效長度,m。L3為錨桿在巷道中的外露長度,一般取0.1 m。其中:L2=[B/2+Htan(45°-ω/2)]/fd=1.32 m,其中:B為巷道開掘?qū)挾龋?.3 m;H為巷道開掘高度,取5.0 m;fd為頂板巖石普氏系數(shù),取3; ω為兩幫圍巖的似內(nèi)摩擦角,ω=tan-1(fd)。計算可得L=2.42 m。根據(jù)圍巖結(jié)構(gòu)特征觀測結(jié)果,其主導(dǎo)裂隙發(fā)育范圍主要集中于2.0 m內(nèi),因此根據(jù)理論計算和現(xiàn)場實測結(jié)果,可選用長度為3.0 m中空注漿錨桿。
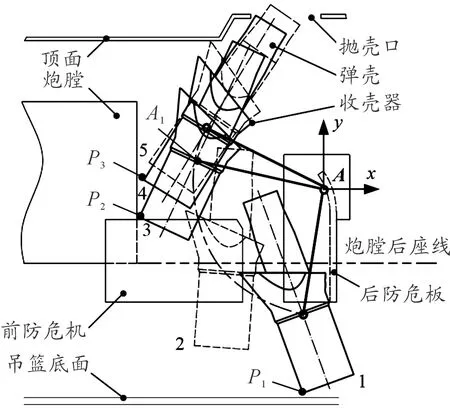
圖2 舉升機構(gòu)空間約束位置示意圖
綜上所述,可確定剛體導(dǎo)引位置為3個,即n=3,式(3)所表示的運動方程可表示為
(4)
式中,
ki1=(xA-xPi)cosΔδi+(yA-yPi)sinΔδi
ki2=(yA-yPi)cosΔδi-(xA-xPi)sinΔδi
ki3=1
u1=r2cosδ0
u2=r2sinδ0
2 連桿式舉升機構(gòu)設(shè)計計算流程
傳統(tǒng)的連桿機構(gòu)設(shè)計方法不夠直觀,計算的工作量大,很多研究者利用計算機輔助軟件進(jìn)行連桿機構(gòu)的設(shè)計與分析,提高設(shè)計效率,如借助Solidworks軟件對連桿機構(gòu)進(jìn)行建模、裝配和運動分析,完成機構(gòu)設(shè)計[1]。此外,傳統(tǒng)數(shù)值解法容易收斂到局部最優(yōu)解,且其收斂效果很大程度上依賴于初始值的選取[2-4],因此許多學(xué)者將現(xiàn)代啟發(fā)式智能算法引入到四桿機構(gòu)的優(yōu)化中來,針對曲柄轉(zhuǎn)角限定和未限定的平面四桿機構(gòu)軌跡綜合問題,可結(jié)合遺傳算法(Genetic Algorithm)全局搜索和擬牛頓算法BFGS局部快速收斂的優(yōu)點[5],針對平面鉸鏈四桿機構(gòu)軌跡綜合的速度與精度問題,可基于B樣條曲線的綜合方法,用人工神經(jīng)網(wǎng)絡(luò)進(jìn)行特征參數(shù)匹配,快速獲得合適的平面鉸鏈四桿機構(gòu)[6]。
在完成剛體引導(dǎo)的連桿式空間約束機構(gòu)數(shù)學(xué)建模后,求解連桿機構(gòu)參數(shù),并進(jìn)行機構(gòu)設(shè)計。在坐標(biāo)系A(chǔ)-xy中,A(xA,yA)為坐標(biāo)原點,基于自動收拋裝置及裝甲車輛的內(nèi)部結(jié)構(gòu)參數(shù),確定P點坐標(biāo)值,如表1。
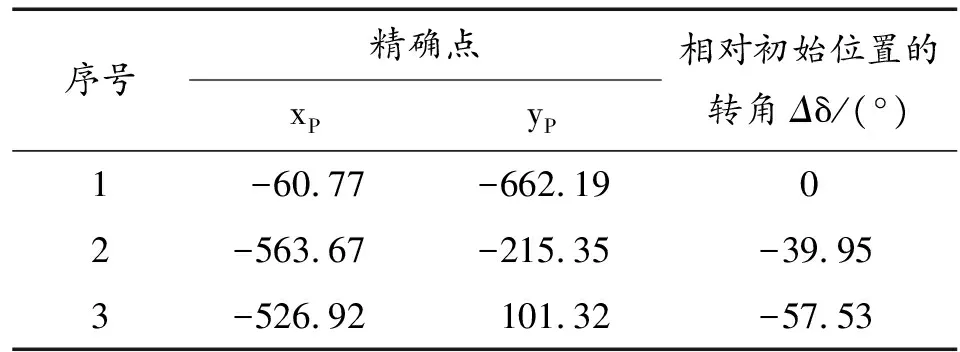
表1 P點坐標(biāo)值
應(yīng)用Matlab數(shù)值計算軟件編寫計算程序,計算流程如圖3所示。計算過程中,已知剛性導(dǎo)引位置Pi的坐標(biāo)值,基于式(4)可求解,二桿組未知參數(shù),然后基于參數(shù)方程可得到二桿交點Ai的坐標(biāo),根據(jù)裝甲車輛的后防危板結(jié)構(gòu),以及連桿運動情況,可初步確定鉸鏈B的初始位置B0,通過相同的方法計算二桿交點Bi的坐標(biāo),以AiBi接近于收殼器中線為目標(biāo)函數(shù),對初始位置B0進(jìn)行優(yōu)化,可求得另外一組二桿機構(gòu),最終綜合出期望的四連桿機構(gòu)。
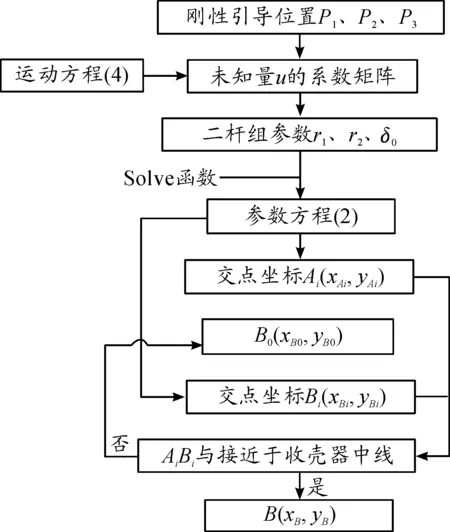
圖3 連桿機構(gòu)參數(shù)計算流程框圖
3 連桿式舉升機構(gòu)設(shè)計結(jié)果
經(jīng)過多組計算,可得到一組解為[Bx,By,r1,r2]=[-2.05,-97.75,459.85,160.16],單位:mm。對結(jié)果歸進(jìn)行整化,可得Bx=-2.05 mm,By=-97.75 mm,r1=459.85 mm,r2=160.16 mm。對機構(gòu)進(jìn)行微調(diào),使得連桿與收殼器中心線重合,完成四連桿機構(gòu)AA1BB1的綜合構(gòu)型。舉升機構(gòu)設(shè)計原理如圖4所示,其機構(gòu)簡單而緊湊,可在約束空間內(nèi)實現(xiàn)剛體的位姿變化。
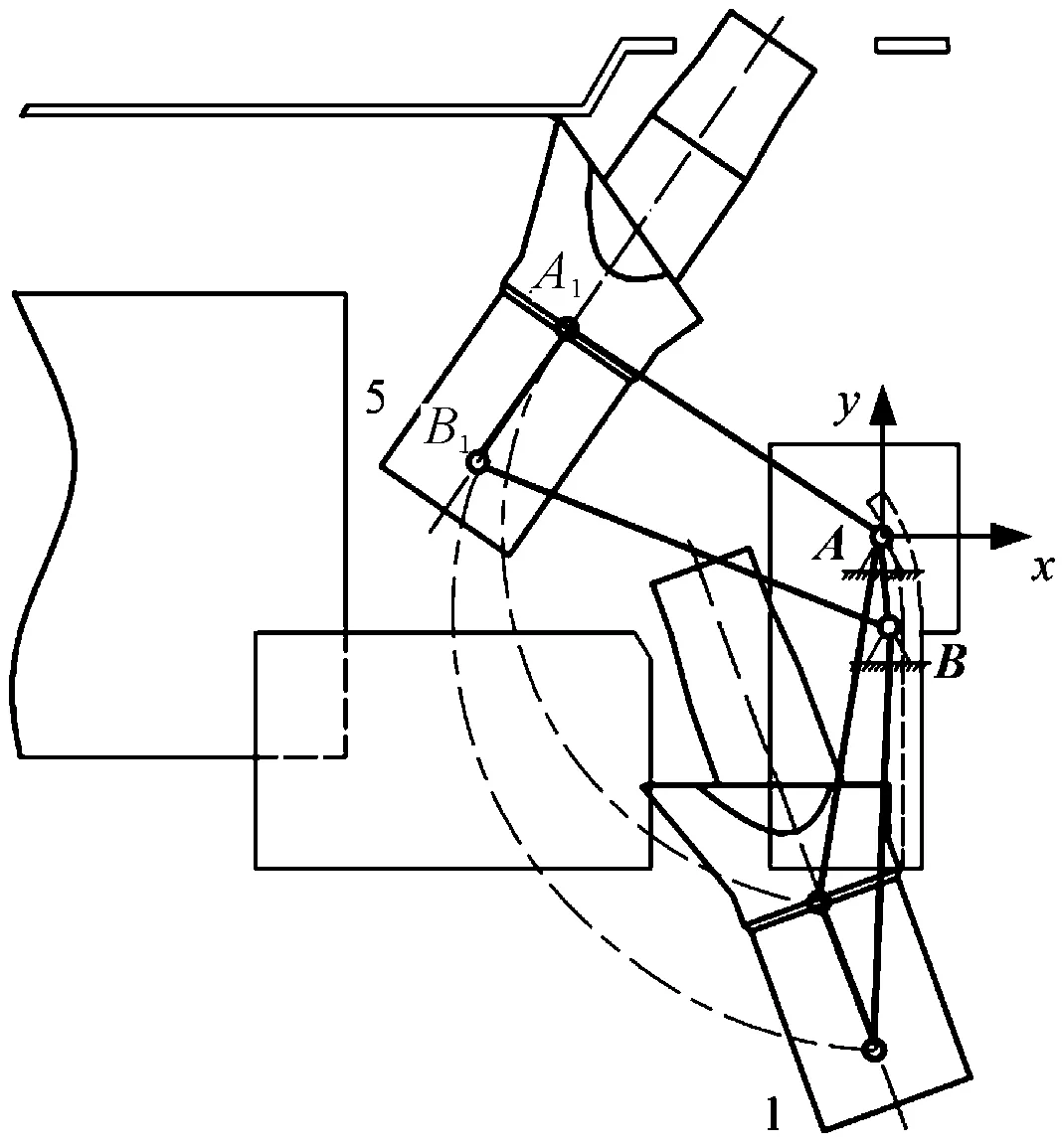
圖4 舉升機構(gòu)設(shè)計原理簡圖
基于舉升機構(gòu)的綜合設(shè)計結(jié)果,對舉升機構(gòu)各連桿進(jìn)行結(jié)構(gòu)設(shè)計,舉升機構(gòu)的三維模型如圖5。為了增強系統(tǒng)的穩(wěn)定性和可靠性,舉升機構(gòu)有兩套完全對稱的四連桿機構(gòu)組成,其中一套為主動部件,另一套為從動部件,按照機構(gòu)的受力情況,根據(jù)重心位置偏于連桿機構(gòu)左部。連桿機構(gòu)三維模型如圖5所示,即驅(qū)動部件T為左側(cè)連桿。連架桿1和連架桿2中間有彎折,其作用是避開前防危板的干涉,為實現(xiàn)圖3所示的收殼位置1的連桿姿態(tài),連架桿2進(jìn)行凹槽設(shè)計,避開連架桿1的固定鉸鏈。為了提高固定鉸鏈的軸向力,在防危板上增加鉸鏈凸臺設(shè)計。
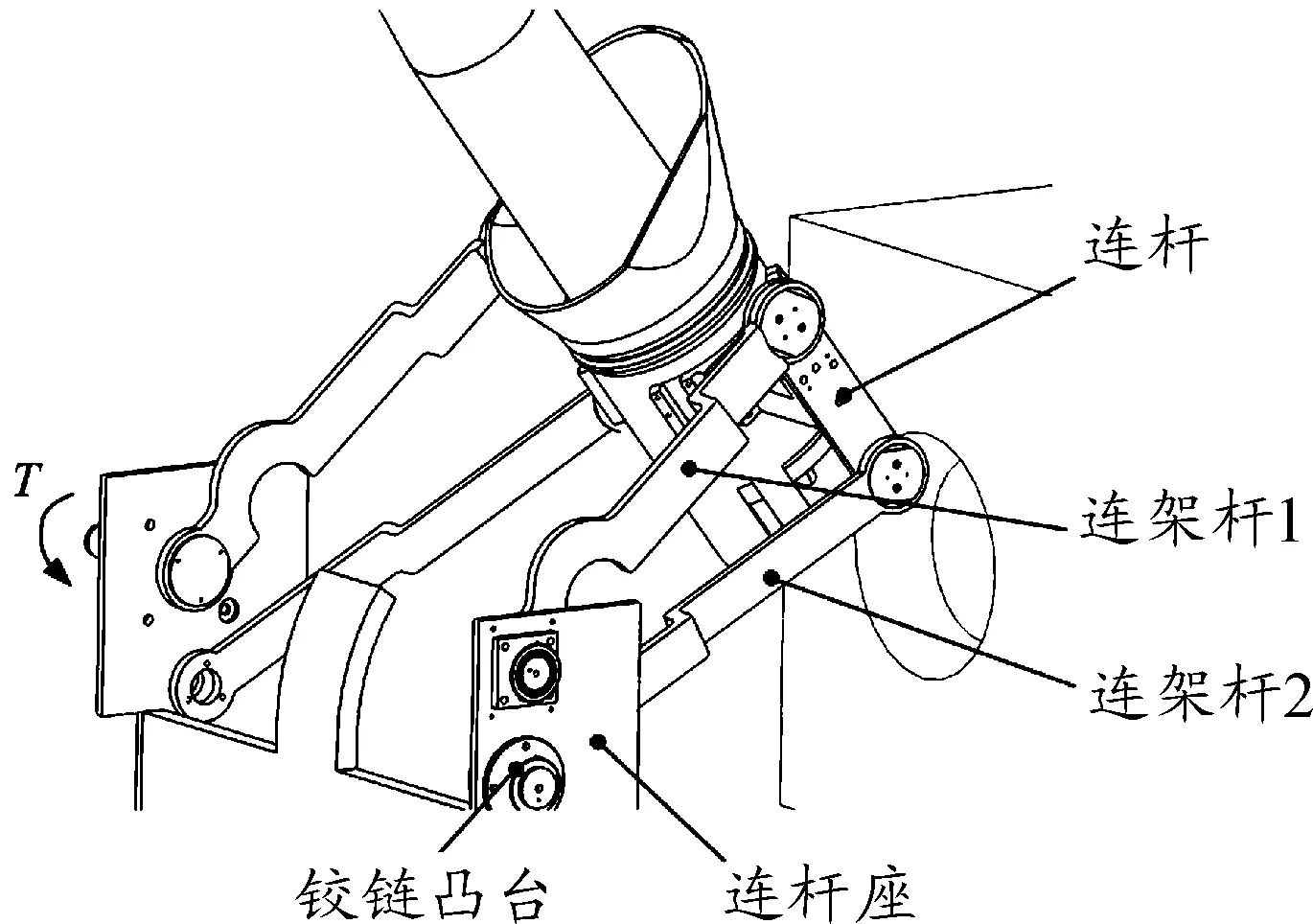
圖5 連桿機構(gòu)三維模型
完成舉升機構(gòu)的結(jié)構(gòu)設(shè)計后,進(jìn)行零件加工裝配,基于剛體導(dǎo)引的連桿式空間約束舉升裝置實物如圖6。基于實驗驗證,舉升機構(gòu)可實現(xiàn)預(yù)計的空間曲線避讓運動,并且具有穩(wěn)定的運動特征。與現(xiàn)有的舉升機構(gòu)比較,設(shè)計靈巧、簡便,滿足利用裝甲車輛有限內(nèi)部空間的設(shè)計要求,可實現(xiàn)空間多約束條件下的期望舉升運動。
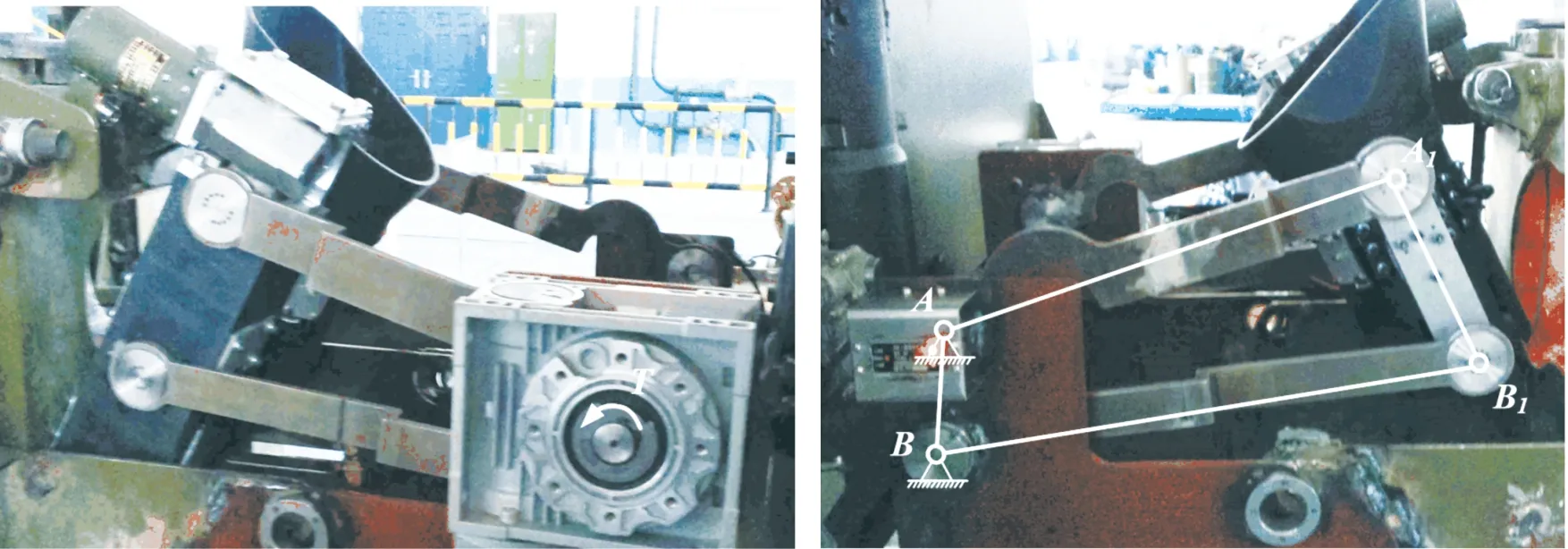
圖6 自動收拋裝置實物
4 結(jié)論
建立了剛體引導(dǎo)的連桿式空間約束機構(gòu)數(shù)學(xué)模型,推導(dǎo)出二桿組的運動方程;應(yīng)用Matlab編寫連桿構(gòu)型計算程序,完成連桿參數(shù)計算,得出自動收拋裝置曲線運動的連桿舉升機構(gòu)尺寸參數(shù)。論文提出了連桿式空間約束舉升機構(gòu)的綜合設(shè)計方法,借助Matlab進(jìn)行四連桿機構(gòu)的解析法設(shè)計,直觀、高效,使傳統(tǒng)對連桿機構(gòu)進(jìn)行運動學(xué)分析的繁瑣方法得到簡化,可為工程技術(shù)人員進(jìn)行四連桿機構(gòu)設(shè)計提供借鑒。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
