超聲自行走精密定位機構
2019-08-29 02:34:10李聞鈺
壓電與聲光 2019年4期
李 聞 鈺
(南京理工大學 機械工程學院,江蘇 南京 210094)
0 引言
隨著當前精密工程技術在若干領域的快速發展,對精密定位技術的需求日益增長,它要求系統具有微納米級的定位精度[1-3]。在超聲自行走精密定位機構的應用領域中,壓電陶瓷微位移驅動器是近年來發展起來的新型微位移器件,它具有體積小,響應快,無噪聲的特點,在微納米級的精密定位系統中得到大量的應用[4-7]。本文提出了一種以壓電陶瓷為驅動器的新型超聲自行走機構,揭示了機構在自行走時的運動學特性,討論了基于壓電耦合的結構模型,基于模態分析的模態共振。實驗證明該自行走機構的輸出位移精度可達10 μm,若將該自行走機構應用于精密測量領域,結合控制反饋系統,可使測量系統具有穩定性強,高效準確,可靠性高,推廣性好等特點。
1 結構特征及工作原理
1.1 結構設計
本文設計的結構如圖1所示,該結構分為兩部分:
1) 主體部分為航空鋁一體結構,考慮到機構的微型化與輕量化,采用鋁結構可使機構在行走過程中減少阻力,進而提高可控性。
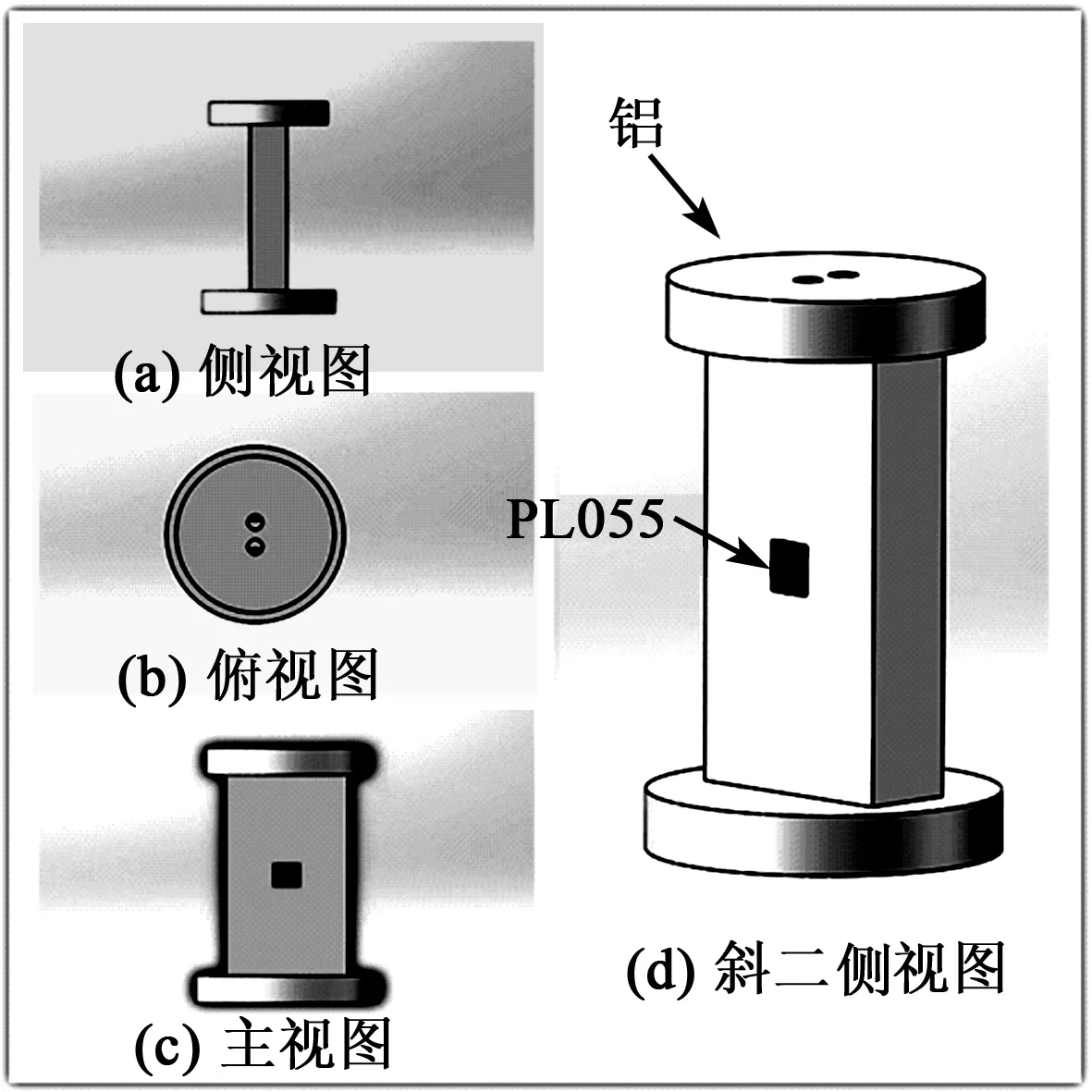
圖1 機械結構模型圖
2) 另一部分是壓電陶瓷,主體結構的上方打有2個貫穿至腹板處的正方形孔,用來在頂絲預緊腹板處放置2個壓電陶瓷。2個壓電陶瓷放于腹板外側,在易拆卸的同時也使整個結構處于對稱狀態。以此使設計的結構緊湊,并為模態分析創造了便利條件,利于尋找為實現其運動所需的伸長、彎曲與扭轉模態。
1.2 運動原理
該結構通過壓電激勵使該結構伸長模態與彎曲模態超聲共振來實現沿一個方向的自行走。該結構在具有伸長模態和彎曲模態的同時還具有扭轉模態,通過不斷的尺寸調整進行結構優化,使3種模態的頻率相近,再用3種模態的共振頻率去激勵結構,使其發生耦合共振振動。3種模態的疊加,可以通過用適當的激勵信號激發結構來實現,使該結構在沿一個方向運動同時進行反向從而沿著相反方向運動。
2 機電耦合仿真分析
2.1 仿真條件
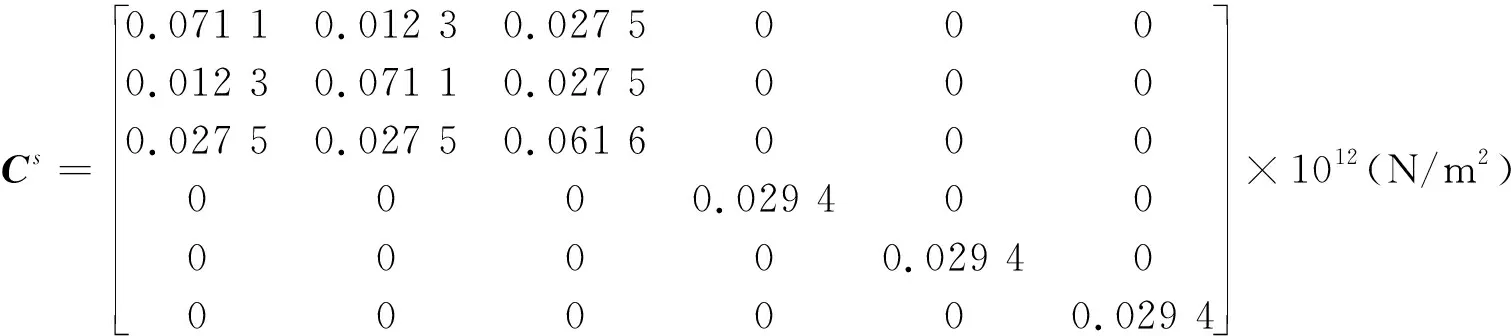
為找到該結構的模態,需對該結構進行模態分析。為得到較精確的模態分析結果,對結構進行尺寸為2 mm的網格劃分。當利用ANSYS Workbench對含有壓電陶瓷的材料進行模態分析時,壓電陶瓷PL055的密度為7 700 kg/m2,介電常數ε11=3 300 F/m, 彈性剛度常數矩陣及壓電常數矩陣分別為
(1)
(2)
Al的密度為2 900 kg/m2,彈性模量為7.1×109Pa,泊松比為0.33。
2.2 仿真結果與討論
為保證實現超聲共振,結合實驗室現有條件,需調整3種模態頻率為20~40 kHz,并通過不斷的尺寸優化使3種模態頻率相近,且共振效果最佳。仿真所得模態如圖2所示。3種模態頻率相近基本符合條件,下面將進行實驗找出使3種模態的共振頻率,并驗證機構自行走的可行性。
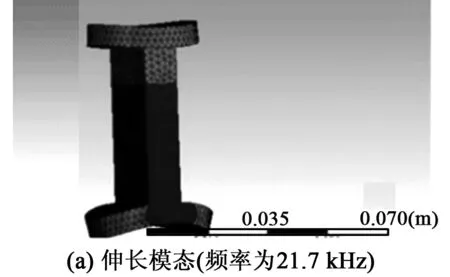
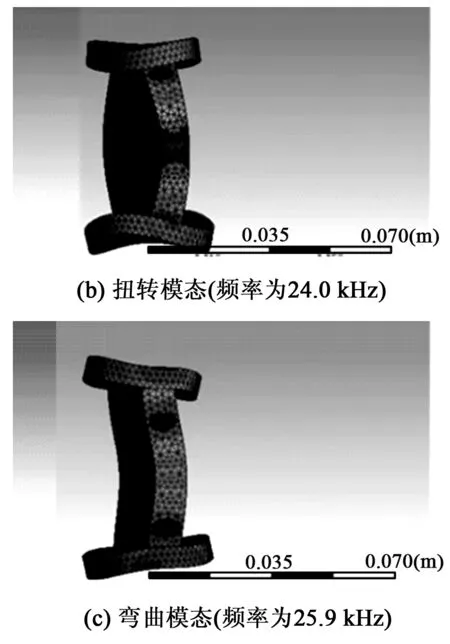
圖2 模態分析結果圖
3 實驗結果與討論
3.1 實驗系統的搭建
本次實驗是在光學防振平臺上完成的,使用型號NES-200-24的明緯開關電源對功率放大器(型號E-617 LVPZT)進行供電,將控制信號輸入到壓電驅動上,在輸出端產生的運動通過電容式位移傳感器(帶有探頭5503的Microsense5810模塊,USA)來捕獲,測量的范圍和帶寬分別為500 μm和20 kHz,位移以電壓信號的形式傳送到具有D/A和A/D的數據采集板(NI PCI-6259,USA),經由數據采集卡存儲到電腦上,在開環狀態下進行測試實驗。在反饋控制方面,設計的控制算法通過桌面實時環境中Matlab/Simulink模塊實現,具體流程圖如圖3所示。加工出的實物圖如圖4所示。
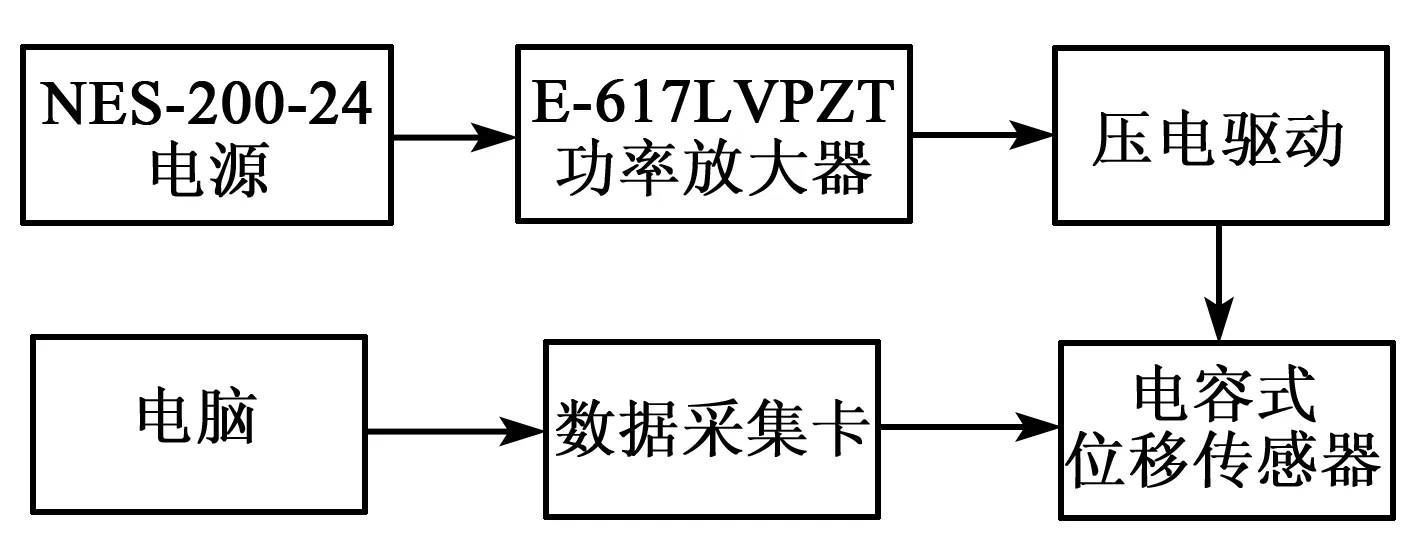
圖3 參數辨識測試系統流程圖
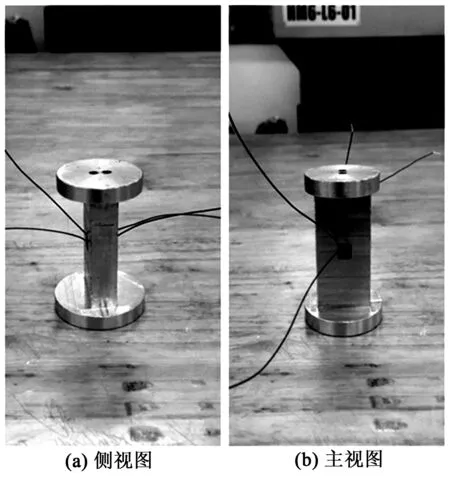
圖4 加工實物圖
3.2 激勵頻率響應特征
由圖2可知,該結構的3種模態及其對應的頻率為找到共振頻率,考慮到理論模型與實際存在的誤差,現通過兩個壓電陶瓷分別輸入相同的頻率,在20~28 kHz,以500 Hz為單位分為17組進行實驗,計算并比較得到的位移值。當找到實現行走時位移最大的頻率,該頻率即為伸長模態與彎曲模態共振的最優頻率。將數據采集卡采集到的數據整理成機構位移-運行時間曲線圖與位移-頻率圖,如圖5所示。
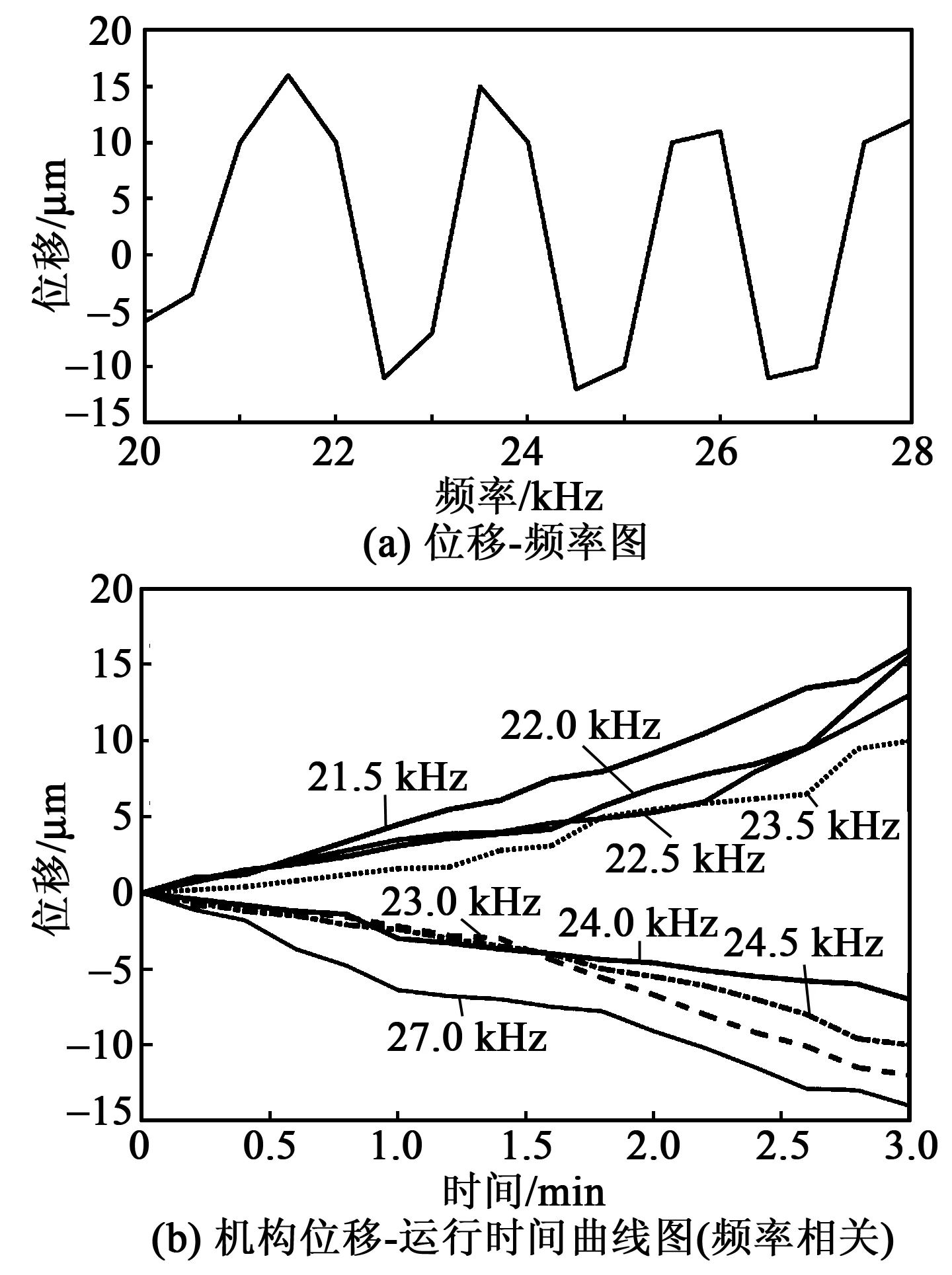
圖5 激勵頻率響應特征圖
由圖5可知,最大位移16 μm出現在頻率為21.5 kHz處,計算出最大速度為8.8×10-2μm/s,該頻率即為最優共振頻率。同時,由圖還可知位移存在反向,說明在基于伸長模態與彎曲模態共振實現自行走的基礎上,加上扭轉模態共振后使物體呈現反向運動。為進一步實現反向運動控制,需要在21.5 kHz頻率條件下調整兩輸入頻率的相位,來找到實現反向的情況。
3.3 反向運動控制
在21.5 kHz輸入頻率條件下調整兩輸入頻率的相位差(Δφ),Δφ在0~π時分6組進行測試,同樣,將數據采集卡采集到的位移曲線匯總至同一起點,整理成機構位移-運行時間曲線圖如圖6所示。
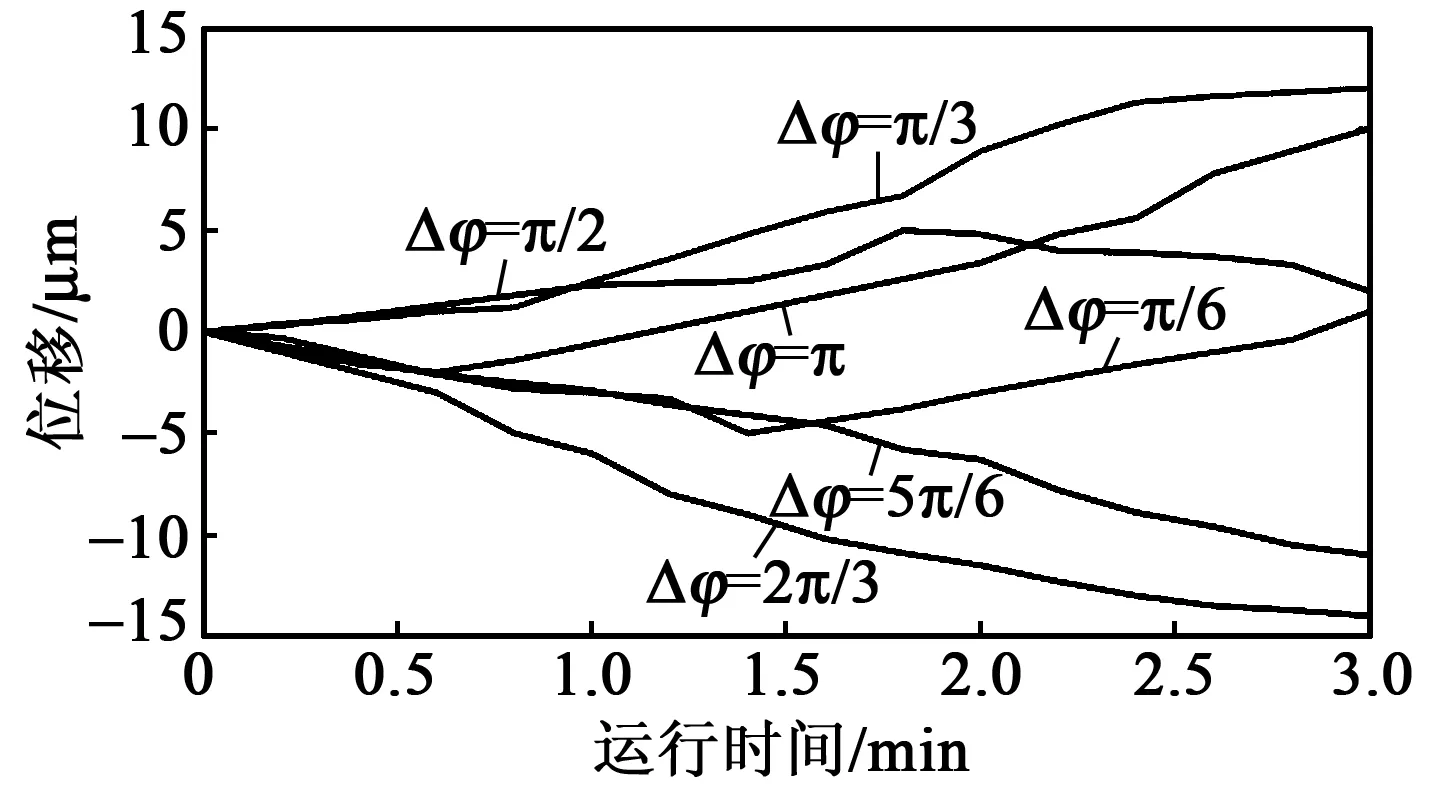
圖6 機構位移-運行時間曲線圖(Δφ相關)
由圖6可知,當Δφ為π/6、π/2、π時機構在沿一個方向運動的同時也進行反向運動。由此,便實現了機構沿一個方向實現自行走并進行反向運動的可控性。
3.4 激勵電壓響應特征
為進一步優化機構自行走的性能,在輸入頻率的幅值上進行調整,考慮到壓電陶瓷的限定電壓范圍,其他條件不變,輸入頻率幅值在10~50 V時分5組進行測試,得到位移-輸入電壓幅值曲線如圖7所示。
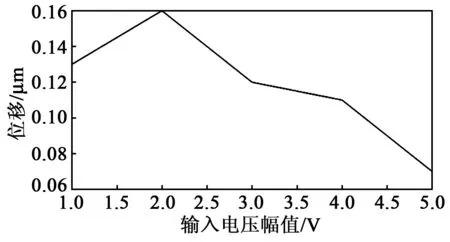
圖7 位移-輸入電壓幅值曲線圖
由圖7可知,當輸入電壓幅值為20 V時,機構位移達到最大,且在達到最大位移后,隨著輸入電壓幅值的增加,機構的自行走位移有下降趨勢。由此可知,輸入電壓幅值是影響機構自行走的一個重要因素,為使運動效果最佳,需要對輸入電壓幅值進行必要的調整。
4 結束語
本文根據現代壓電驅動器高效,低能耗,響應快的要求,提出了一種可自行走的微型機器設計方法,并介紹了微型機器的結構和工作原理。然后研究了仿真中的模態分析及驗證實物性能的實驗測試。最后,給出了在機構的3種模態共振下如何提高微型機器自行走性能的方法。實驗結果證明,微型機器的運動測量精度在微米級;在21.5 kHz激勵下,自行走運動最大速度為8.8×10-2μm/s;當兩輸入頻率相位差為π/6、π/2、π時便可實現在沿一個方向運動的同時進行反向運動,基本滿足了超聲自行走微型智能機器的要求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00