大行程無寄生位移柔性壓電微夾鉗結構設計
2019-08-29 02:34:08賴磊捷
壓電與聲光 2019年4期
丁 嚴,賴磊捷
(上海工程技術大學 機械與汽車工程學院,上海 201620)
0 引言
微夾鉗在微機電系統、生物工程細胞微操作等領域中有廣泛的應用,是微裝配、微操作中的關鍵工具[1-2]。如在微機電系統中,微夾鉗可將微軸、微齒輪等微零件裝配成微部件;在生物工程領域,微夾鉗可用來抓取細胞[3]。然而,由于壓電陶瓷驅動器輸出位移較小,通常在幾微米到幾十微米,因此,為了滿足大位移應用場合,一般需借助放大機構來擴大其輸出位移[4]。Zubir等[5]采用平行四邊形鉸鏈放大機構開發了一種壓電驅動微夾鉗,位移放大比為2.85,輸出位移行程為100 μm;Wang等[6]提出了一種由橋式機構和杠桿機構組成的三級放大機構柔性微夾鉗,位移放大比為22.8,輸出位移行程僅190 μm;Liang等[7]設計了一種一側是橋式機構和杠桿機構,另一側固定的兩級放大柔性微夾鉗,位移放大比為13.94;王代華等[8]基于偽剛體模型法設計了兩級杠桿放大機構和平行四連桿機構組成的柔順微夾鉗。由此可知,文獻[5]可保證無寄生位移的平行夾取,但位移放大比較小。文獻[6-8]均采取杠桿機構作為最后一級的位移輸出機構,導致了夾爪寄生位移和夾持角度的產生。綜上所述可知,目前的研究只著重于增大位移放大比或改善夾取形式的某一單方面研究,因此,為使柔性微夾鉗更好地應用于不同場合,需同時對微夾鉗的這兩方面性能進行改進和設計。
本文提出了一種含對稱兩級放大的新型微夾鉗柔性機構,以杠桿機構為第一級放大機構,以半橋式機構為第二級放大機構,整體結構呈對稱分布。隨后考察了微夾鉗的位移放大比、輸入剛度等靜動力學特性,通過建立平面3自由度振動微分方程,利用剛度矩陣法求出微夾鉗柔性機構的整體剛度矩陣,并計算出位移放大比和輸入剛度等。最后利用有限元分析和實驗測試分析對解析模型得到的結果進行驗證。結果表明,解析模型分析、有限元分析及實驗測試得到的結果較吻合,證明了此柔性微夾鉗結構的可行性。
1 微夾鉗結構設計

圖1 微夾鉗結構示意圖及其變形
圖1(a)為微夾鉗柔性機構。圖中1~16分別為微夾鉗中的各剛體部分。微夾鉗柔性機構由杠桿機構和半橋式機構組成兩級放大,其中,杠桿機構上、下對稱分布,半橋式機構左、右對稱分布,壓電陶瓷驅動器置于輸入端剛體1、2之間,輸出端剛體15、16分別為兩組半橋式機構的輸出剛體,并引出夾持臂和夾爪。壓電陶瓷驅動器的輸出位移輸入到兩輸入端,傳遞到杠桿機構形成第一級放大,杠桿機構的輸出位移再輸入到半橋式機構形成第二級放大,其變形原理如圖1(b)所示。由于微夾鉗整體構型采用完全對稱分布的結構,因此,在夾取位移過程中,可以保證夾爪夾取過程中無寄生位移的產生,實現平行夾取。
2 微夾鉗柔性機構力學解析模型

(1)
其中
(2)



圖2 剛體i與鉸鏈k連接及剛體i、j通過鉸鏈k連接示意圖
(3)
其中
(4)
式中αij為坐標系Oik-XYZ相對于坐標系Oi-XYZ旋轉角度。

(5)
(6)
其中
(7)
(8)
(9)
式中:αijk為坐標系Oijk-XYZ相對于坐標系Oi-XYZ的旋轉角度;αjik為坐標系Ojik-XYZ相對于坐標系Oj-XYZ的旋轉角度;Sijk為平移變換矩陣。(Cik)-1為圖2(a)局部坐標系Oki-XYZ中柔性鉸鏈的剛度,單個直角型鉸鏈的柔度矩陣[10]為
(10)
式中:l為鉸鏈長度;b為鉸鏈寬度;t為鉸鏈厚度(見圖2);E為材料彈性模量;G為材料剪切模量。
Kq=F
(11)
根據振動理論,機構的固有頻率可由式(1)的特征方程解得
|λI-M-1K|=0
(12)
則機構的固有頻率為
(13)
此柔性微夾鉗的輸入位移為
(14)
式中:Kp為壓電陶瓷剛度;Kin為微夾鉗輸入剛度;ΔLnom為壓電陶瓷標稱位移,則輸入力Fin=Kin·ΔLs。當輸入端輸入力Fin時,根據式(11)可計算出輸入端和輸出端的位移,因此,位移放大比和輸入剛度分別為
Ramp=c44,2/c1,1
(15)
Kin=1/c1,1
(16)
式中c1,1,c44,2分別為剛體1的輸入位移和剛體15的輸出位移。
3 有限元分析(FEA)與驗證
采用ANSYS Workbench軟件對微夾鉗柔性機構進行靜力學分析,以獲得微夾鉗的位移放大比、輸入剛度、最大應力等。首先在SolidWorks中建立柔性微夾鉗的三維模型,然后導入到ANSYS Workbench中,定義材料為AL7075-T651,其彈性模量為71 GPa,泊松比為0.33。分析結果如圖3所示,最大應力發生在半橋式放大機構鉸鏈處,等效應力最大為68.585 MPa低于材料的屈服強度503 MPa。微夾鉗的行程為365.45 μm,放大比為28.8。模型分析和有限元分析(FEA)的輸入剛度分別為12.46 N/μm和11.47 N/μm。

圖3 輸入力最大時應力和總變形圖
4 實驗驗證
實驗如圖4所示,采用線切割加工的方法加工出材料為AL7075-T651的微夾鉗結構,采用壓電陶瓷驅動器(PAL40VS12,行程為38 μm,剛度為25 N/μm)驅動柔性微夾鉗,使用2個電渦流傳感器(分辨率為0.1m)分別測量其輸入端和輸出端的位移。實驗結果如圖5所示。由圖可知,輸入和輸出位移的最大值分別為334.01m和12.04m,位移放大比為27.74。圖6為解析模型分析、有限元分析和實驗測試所得的位移放大比比較圖。由圖可知,最大誤差僅為10%,證明了建模方法的有效性和準確性。
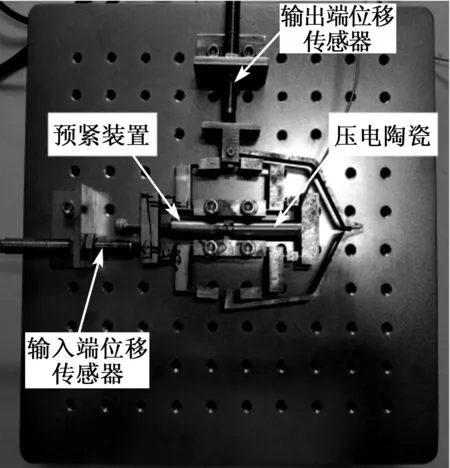
圖4 柔性微夾鉗位移測試系統
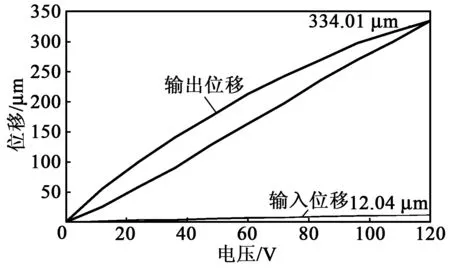
圖5 壓電陶瓷驅動器輸入電壓與輸入位移、輸出位移曲線
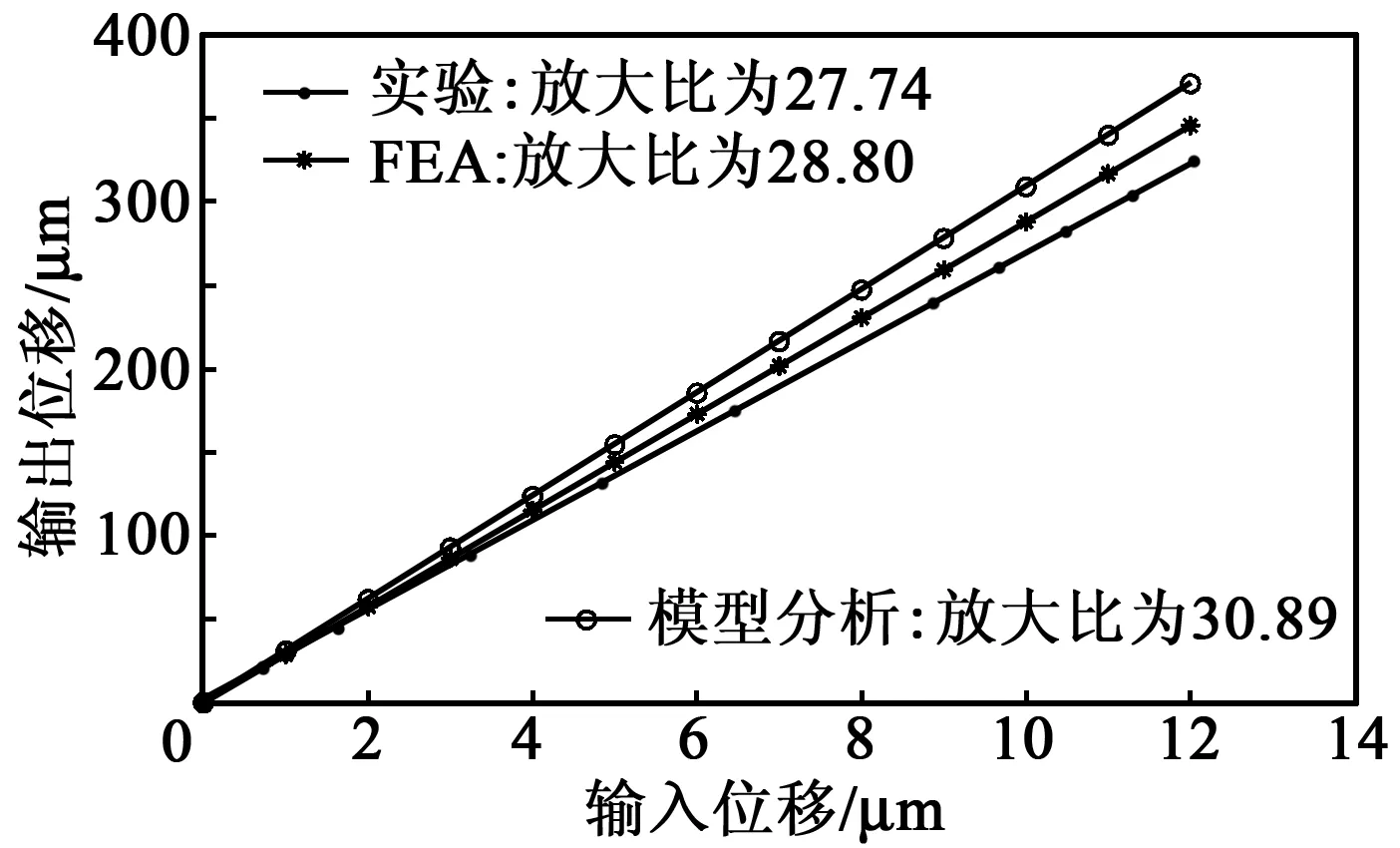
圖6 實驗、FEA、解析模型分析放大比比較
5 結束語
本文研究了一種基于壓電陶瓷驅動的柔性微夾鉗,此微夾鉗由杠桿機構和半橋式機構組成,整體呈對稱分布,避免了夾爪寄生位移的產生,保證了夾爪的平行夾取。通過剛度矩陣法建立了微夾鉗靜動力學解析模型,分析計算得到位移放大比高達30.89,利用有限元仿真分析得出位移放大比為28.8,再通過實驗測出位移放大比為27.74,單個夾爪的行程為334.01 μm。實驗結果表明,解析模型、有限元模型及實驗系統所得位移放大比基本一致,計算相對誤差小于10%,說明了此微夾鉗柔性機構的可行性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24