汽車駕駛性評價中小波去噪分解層數的確定
2019-08-27 07:32:30劉海江
噪聲與振動控制 2019年4期
劉海江,張 欣,李 敏
(同濟大學 機械與能源工程學院,上海 201804)
在汽車駕駛性評價過程中,由于測量過程中路面的不平坦、車身的振動、儀器本身及數據在傳輸過程中會受到諸多因素的影響,測量的數據中必然會存在噪聲干擾,導致評價指標計算不準確,進而影響到駕駛性能的評價,因此在駕駛性評價之前需要進行含噪數據的處理[1-2]。隨著信號處理技術的發展,小波變換在數據處理中的應用越來越廣泛。由于汽車駕駛性評價過程中的測量數據一般都為離散數據,因此可采用離散小波去噪,對測量信號進行相應的分解與重構,小波去噪可有效地分離出異常信號,保留有用的信號信息。但是在進行小波去噪時,小波去噪分解層數的選擇對去噪結果具有較大的影響。因次如何確定小波去噪的最佳分解層數對于確保駕駛性評價準確性是極為重要的。
目前,小波去噪最佳分解層數的選擇方法主要可分為2種:基于信號特征的方法和基于噪聲特征的方法[3]。由于在測量汽車駕駛性數據的時候存在多種不同的噪聲干擾,因此基于噪聲特征的方法較為復雜,與之相比,基于信號特征來選擇合適的小波去噪的最佳分解層數則更為科學。而基于信號特征的選擇方法,目前主要是根據信號的均方根誤差、信噪比、互相關系數及平滑度來進行小波去噪參數的優化選擇[4]。文獻[5] 提出了通過比較信號的均方根誤差變化量的大小來選擇合適的分解層數;文獻[6] 提出了通過將均方根誤差和平滑度進行歸一化,采用變異系數法將其線性組合成復合指標,從而進行分解層數的選擇;文獻[7] 提出通過綜合考慮均方根誤差、信噪比、平滑度和互相關系數來選擇小波去噪的最佳分解級數。然而在實際應用過程中,雖然上述方法在分解層數選擇過程中取得了一定的效果,但也都存在一些局限性:
(1)單一指標的變化規律不夠準確;
(2)計算過程較為冗雜;
(3)適應性較差。
因此在上述方法的基礎之上提出了一種基于熵值法的多指標融合的小波去噪分解層數的選擇方法,即將均方根誤差、信噪比及平滑度的變化量進行歸一化之后,通過熵值法進行權值分配,將其融合成一個復合指標,從而選擇最優的小波分解層數。
1 小波去噪模型及其基礎評價指標
1.1 小波去噪模型
一個實際測得的信號f(i)其實是含有噪聲信號的,具體可表示為以下模型

其中:f(i)為測得含噪信號,s(i)為真實信號,ε(i)為噪聲信號。小波去噪過程即將實際測得的信號f(i)中的噪聲信號ε(i)濾除得到真實信號s(i)的過程。主要分為以下3個步驟:
(1)通過小波對所測含噪信號進行分解。選擇相應的小波基函數和分解層數N對測得的含噪信號進行N層小波分解,可獲取各尺度小波系數ψji。
(2)對所得的各尺度小波系數進行閾值估計。選擇合理的閾值T和相應的閾值函數對各尺度小波系數ψji進行閾值估計,從而得出各尺度小波估計系數
(3)對各尺度小波估計系數進行小波重構。根據小波分解得到的第1-N層的高頻小波估計系數和第N層的低頻信號系數進行小波重構,獲得去噪后的信號s′(i)。
1.2 基礎評價指標
小波去噪質量的基礎評價指標主要有以下4種:均方根誤差RMSE、信噪比SNR、相關系數R以及平滑度r。
(1)均方根誤差RMSE
均方根誤差指原始信號與去噪信號之間方差的平方根,其值越小,去噪效果越好。

式中:n為信號長度,f(i)為原始信號,s′(i)為小波去噪分解重構后的信號。
(2)信噪比SNR
信噪比是指信號功率與噪聲功率之間的比值,其值越大,去噪效果越好。
式中:n為信號長度,f(i)為原始信號,s′(i)為小波去噪分解重構后的信號。
(3)相關系數R
相關系數是指原始信號與去噪信號之間的相似度,其值越大,去噪效果越好。

式中:σf、σs'分別為原始信號與小波去噪分解重構后的信號的標準差。
(4)平滑度r
平滑度是指去噪信號一階差分與原始信號一階差分之間方差根的比值,其值越小,去噪效果越好。
式中:n為信號長度,f(i)為原始信號,s′(i)為小波去噪分解重構后的信號。
2 多指標融合
上述的單一基礎評價指標雖然都能在一定程度上反映去噪效果的好壞,但是都存在一定的局限性。如果能從上述基礎評價指標中選取某幾個從不同的方面來評價小波去噪的質量,再通過一定的方法去分配各個指標的權重,將其融合成一個復合指標,那么根據這個復合指標就能較為全面地評判去噪質量的好壞,從而進行小波去噪最佳分解層數的優化選擇[8]。
2.1 基礎指標的選取
選取基礎指標的關鍵在于從多角度全面描述去噪質量的好壞。研究表明,均方根誤差主要反映了去噪信號與原始信號的一個整體偏差信息;信噪比反映了噪聲信號與原始信號的一個能量關系;相關系數反映了去噪信號與真實信號的一個擬合程度;平滑度反映了去噪信號與原始信號在局部程度上的逼近關系[9]。由于真實信號在實際實驗過程中是未可知的,因此相關系數的參考意義不大。綜上,為了全面有效地評價去噪質量,選取均方根誤差、信噪比以及平滑度3個基礎評價指標進行指標融合。
2.2 基礎指標的改進
在理論真實信號未可知的情況下,為了更加準確進行去噪質量的評價,需要將上述基礎評價指標進行改進。經研究發現,上述各選取的基礎評價指標的變化量會隨著分解層數的增加而表現出較為明顯的收斂特性,因此借助各基礎評價指標的變化量特征來進行去噪質量評價。各改進的評價指標為:
(1)均方根誤差變化量Vrmse

上式中:Vrmse(m)表示第m層分解尺度下均方根誤差變化量,RMSE(m+1)、RMSE(m)分別表示第m+1、m層分解尺度下的均方根誤差。
(2)信噪比變化量Vsnr

上式中,Vsnr(m)表示第m層分解尺度下的信噪比變化量,SNR(m+1)、SNR(m)分別表示第m+1、m層分解尺度下的信噪比。
(3)平滑度變化量Vr

上式中:Vr(m)表示第m層分解尺度下的平滑度變化量,r(m+1)、r(m)分別表示第m+1、m層分解尺度下的平滑度。
2.3 多指標融合構建復合指標
由于上述3個改進后的評價指標物理意義不同,且基數和變化范圍不同,如果僅僅將進行簡單的線性組合,則組合后的結果參考意義不大,因此在進行指標融合之前,需要將其進行歸一化處理[10]。即將各個指標的變化量數值規劃到[0,1] 區間內,使其成為純數值量,且其數值越小,表示去噪效果越好。歸一化處理的具體形式為
上式中 :Vrmsemax、Vrmsemin、Vsnrmax、Vsnrmin、Vrnax、Vrmin分別表示均方根誤差變化量、信噪比變化量、平滑度變化量的最大值和最小值。
由于不同的評價指標所涵蓋的物理意義不同,因此在進行指標融合的過程中,需要對各個評價指標進行權值分配。現通過信息熵法來確定權重。信息熵主要是從信息的不確定性和概率的角度來表征信息源的不定度[11]。在本例中,若某個評價指標給予的信息量越大,其對應的不確定性就越小,那該評價指標對應的熵值也就越小。因此可以根據信息熵的此特性,對各指標進行權重分配。根據熵值的大小判斷其離散程度,離散程度越大,那么其在復合指標中影響程度越大,從而權重也就越大。本例中運用熵值法定權重的基本步驟為:
(1)選取t種小波去噪參數、m個評價指標,則xij為第i種參數的第j個評價指標的數值;
(2)指標的歸一化處理(上文已進行此操作,不再贅述);
(3)計算第j項指標下的第i種參數占該指標的比重
(4)計算第j項指標的熵值

式中:k=1∕ln(t)> 0;
(5)計算信息熵冗余度

(6)計算各項指標的權值

權值分配完成之后,則需要通過多指標融合構建復合指標,其具體形式為

式中:Y為融合后的復合指標,wVrmse、wVsnr、wVr分別表示由信息熵法計算得到的均方根誤差變化量、信噪比變化量及平滑度變化量的權重,PVrmse、PVsnr、PVr分別表示均方根誤差變化量、信噪比變化量及平滑度變化量的歸一化處理的結果。
3 實例驗證分析
由于在進行駕駛性試驗時,受到發動機的振動、路面的不平坦、離合器的脫離接合帶來的抖動等諸多因素的影響,測得的加速度信號中會有較多的噪聲干擾,使得加速度信號在較短的時間內產生較大的幅值變化。現截取某品牌試驗樣車在駕駛性評價試驗過程中所測得的部分加速度信號,如圖1所示,利用上述方法進行小波去噪,從而為后續駕駛性評價提供準確的數據參考。
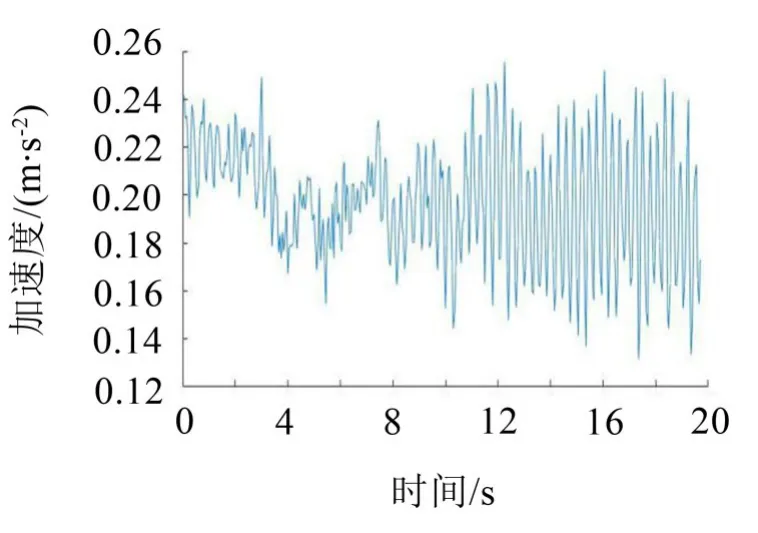
圖1 初始加速度信號
為了更好濾除掉噪聲的干擾,保留汽車駕駛性評價所需要的有用信號,選用不同的小波基函數進行對比,發現具有較高正則性和較好緊支性的sym3函數處理效果最佳。現采用小波固定閾值去噪方法,利用sym3小波基函數進行多層的信號分解與重構,其各層信號的基礎評價指標如表1所示。
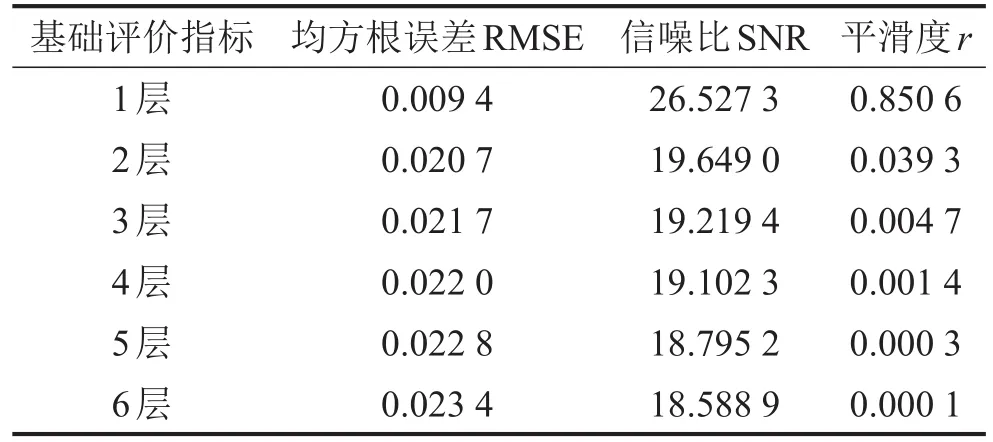
表1 各層分解的基礎評價指標
再采用上述基于信息熵法的多指標融合方法進行去噪質量評價,得到如表2所示的各指標權重以及表3所示的融合后的各層復合指標Y的值。
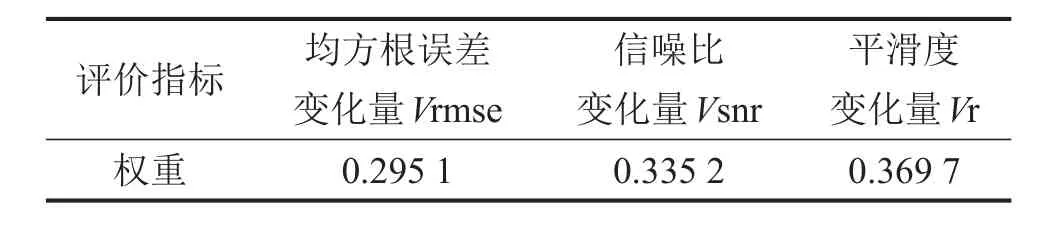
表2 指標所占權重表

表3 復合指標數值表
由表1可知,若單純依靠均方根誤差或信噪比的基礎評價指標來看,則1層分解層數去噪效果較好,若單純從平滑度來看,則6層分解層數去噪效果較好。而在此次的小波去噪質量評價中,采用了基于信息熵的多指標融合的方法,由表2可知,此時平滑度變化量所占比重較大,這是由于平滑度體現了信號的局部細節特征,能夠將汽車加速度信號的局部變化有效地保留下來。經過復合指標的計算,由表3可知,在3層分解尺度下,指標融合之后得到的復合指標Y值最小,故認為此時的去噪效果最佳。其加速度信號在1至5層分解尺度下的去噪結果如圖2至圖6所示。
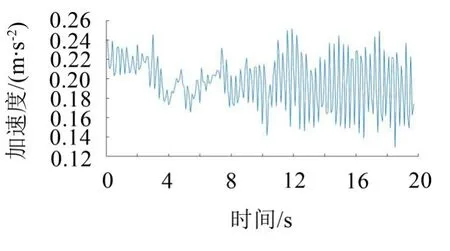
圖2 分解層數為1時的加速度信號
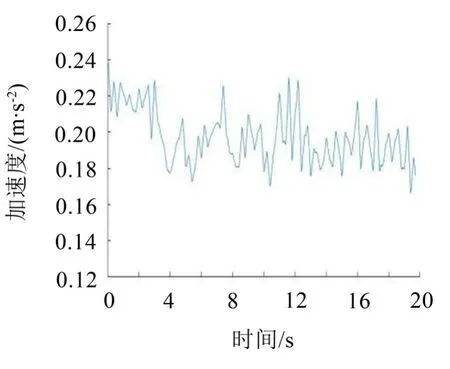
圖3 分解層數為2時的加速度信號
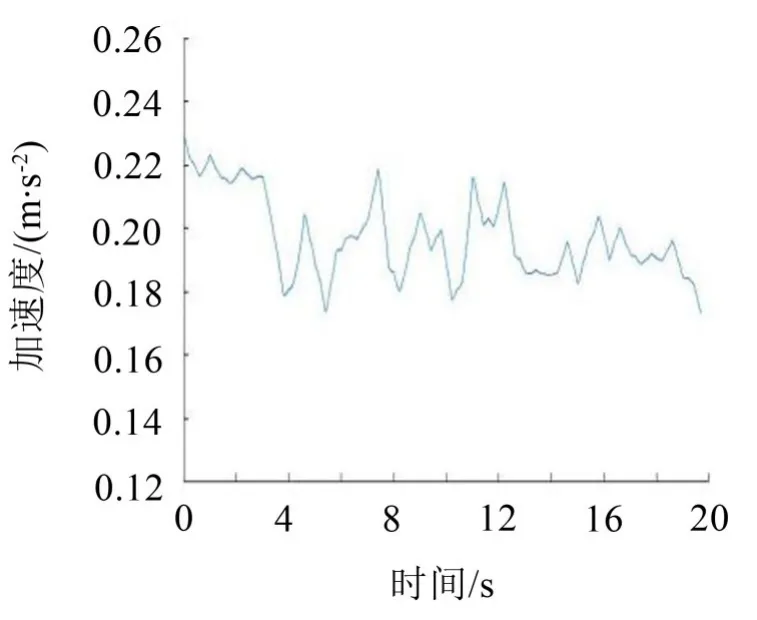
圖4 分解層數為3時的加速度信號
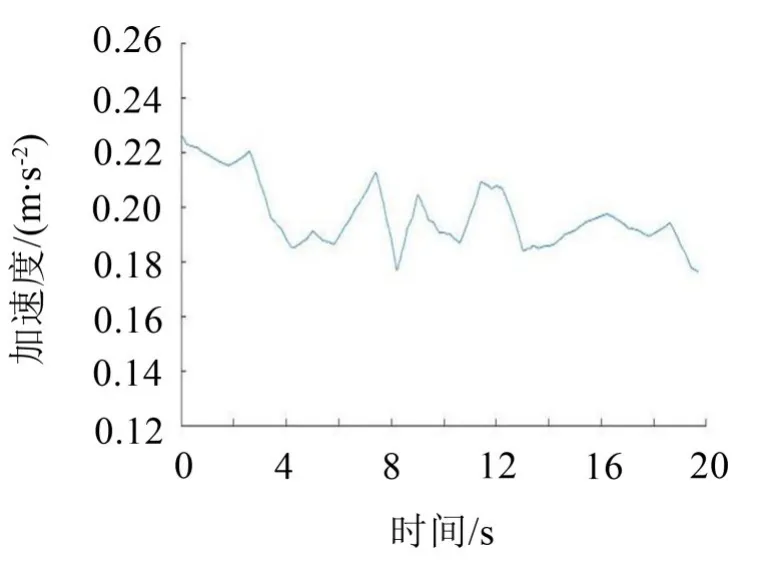
圖5 分解層數為4時的加速度信號
從圖2至圖6中,可以看出分解層數為1或2時,其信號曲線振動頻率依舊較大,其噪聲沒有濾除干凈;分解層數為4或者5時,信號曲線雖然非常光滑,但是信號濾除過度,很多局部有用的振動信號也被濾除掉了;而分解層數為3時,曲線較為光滑,且有一定的小凹谷和凸起。將分解層數為3的小波去噪后的信號與原初始信號進行對比,如圖7所示。
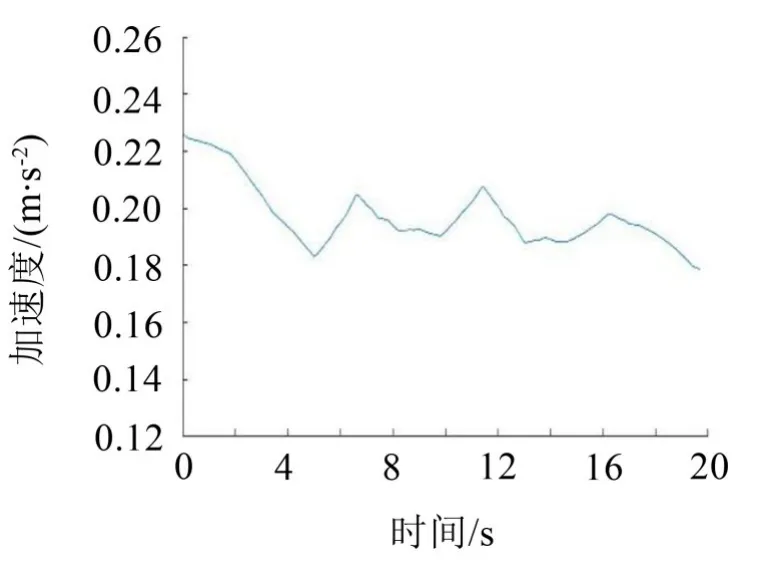
圖6 分解層數為5時的加速度信
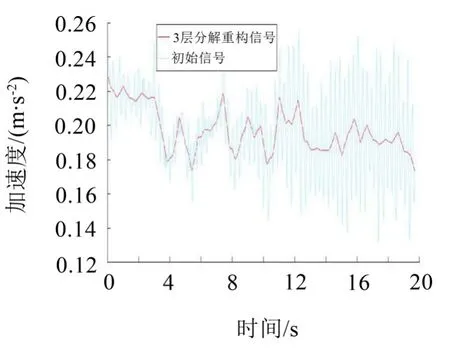
圖7 初始信號及分解層數為3時的去噪后信號
采用分解層數為3的小波去噪后的信號不僅保留了原加速度信號中的整體趨勢信息,而且對于局部細節信息也有較好的逼近,可以看出去噪質量較好。因此采用基礎評價指標來評判去噪質量從而選擇分解層數是不準確的,而采用上述基于信息熵法的多指標融合方法來確定小波去噪的分解層數則效果較好。
4 結語
針對汽車駕駛性評價過程中所采集的加速度信號,采用了基于信息熵法的多指標融合方法來確定小波去噪的最佳分解層數。首先根據4個評價指標各自的特點,選取了3個基礎評價指標:均方根誤差、信噪比以及平滑度;然后改進評價指標,得到其變化量;再利用信息熵法將其進行指標融合,得到復合指標,根據復合指標值的大小來選擇最佳的分解層數。采用實驗數據進行驗證,證明了此方法簡單有效,能夠在濾除噪聲的同時,較好地保留本身有用的整體信號和細節信息,為后續駕駛性的準確評價提供了數據保障,同時該方法具有較廣的適應性,也為評價小波去噪質量提供了一種新的參考和思路。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
石油瀝青(2021年4期)2021-10-14 08:50:44
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
