基于人工蜂群算法的高速列車運行節能優化研究
2019-08-27 01:25:40段玉瓊朱愛紅馬曉娜
鐵道標準設計 2019年9期
關鍵詞:優化
段玉瓊,朱愛紅,馬曉娜,李 杰
(蘭州交通大學自動化與電氣工程學院,蘭州 730070)
近年來,隨著我國鐵路的快速發展,不僅促進了經濟要素的快速流動,更將東部地區產業發展的脈搏延伸到全國各地,日新月異地改變著中國,極大地提升了中國在世界上的地位、提高了國人的民族自尊心。隨著我國高速鐵路路網規模的快速擴大,中國高速鐵路已占世界高速鐵路的66%。我國已經研制出具有自主知識產權的“復興號”動車組,使得鐵路列車的速度大幅度提升。鐵路列車的大幅度提速不僅提高了鐵路運輸服務的質量,而且極大地增強了鐵路運輸行業的市場競爭力,但與此同時也大大地增加了列車運行所需的能源消耗。因此節能問題的研究具有重要意義。列車的運行工況在限制速度的約束下可分為牽引、巡航(勻速)、惰行和制動4種[1]。列車的節能運行操縱策略,以減少能耗為目標,找到列車的控制操縱序列以及從一個工況到另一個工況的轉換點,實現列車的優化運行。文獻[2]采用神經網絡和遺傳算法來解決工況轉換策略的優化問題。文獻[1]根據最優惰行點選擇原則和再生制動節能方法,采用粒子群優化算法優化列車運行。文獻[2]根據動車運行特性和牽引特性曲線,采用遺傳算法來優化動車組運行的惰行控制點,從而達到降低列車運行能耗的目的。綜上所述,目前針對列車運行節能優化的研究已經取得了一定的研究成果,但仍有許多不足的地方。因此,在對比群智能優化算法的優化性能后,本文采用ABC算法對列車運行節能優化問題進行研究,以彌補其他智能優化算法在本問題上的不足。
1 高速列車運行能耗過程的模型建立及問題描述
由于高速列車在運行過程中的能源消耗主要用于牽引加速和克服阻力,而牽引能耗是列車運輸能耗的主要部分。因此,通過減少牽引能耗來實現列車節能運行。
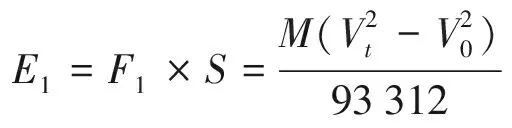
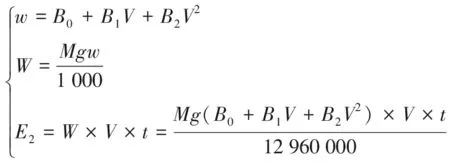
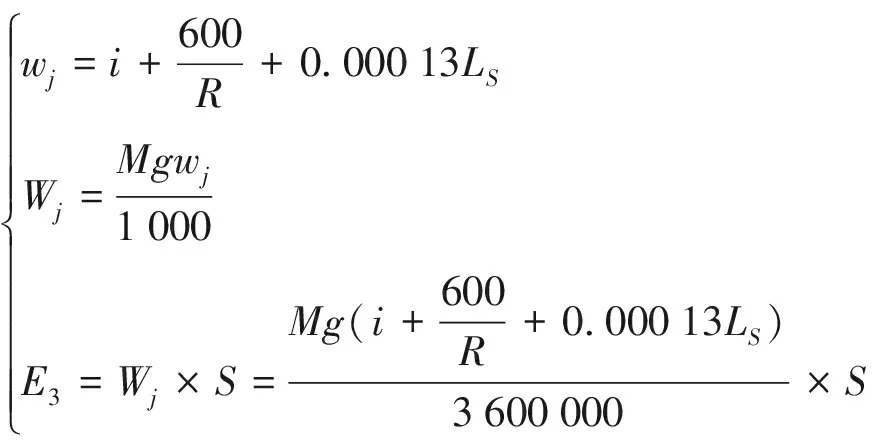
通常高速列車運行的牽引能耗可以根據《列車牽引計算規程》中列車牽引特性曲線與能耗特性曲線計算得到,但在實際情況中仍存在能耗特性曲線失效或者未知的可能[3]。因此從牽引做功和能耗轉換的角度來建立牽引能耗優化模型進行研究。利用最基本的能耗計算方法同時結合能量轉換理論,得到高速列車牽引能耗如式(1)~式(4)所示。
列車牽引能耗E
E=E1+E2+E3
(1)
(2)
(3)
(4)
式中,E1為列車合力能耗,J;E2為列車所受的基本阻力能耗,J;E3為列車所受附加阻力能耗,J;F1為合力,kN;S為距離,m;M為列車總質量,t;Vt為末速度,km/h;V0為初速度,km/h;w為列車單位基本阻力,N/kN;B0,B1,B2為與車輛類型有關的經驗常數;W為列車基本阻力,kN;t為時間,s;wj為列車所受的單位加算坡道附加阻力,N/kN;i為坡度的千分數;R為曲線半徑,m;LS為隧道長度,m;Wj為列車的加算坡道附加阻力,kN。
所謂優化問題,就是在滿足一定條件下,在眾多的方案或者參數值中尋找最優方案或者參數值,以使得某個或多個功能指標達到最優或使系統的某些性能指標達到最大值或最小值[4]。因此,對于高速列車運行節能優化問題,同樣也是在給定的線路條件、運行時間、列車參數等條件下,列車在運行過程中尋求比較節能的操縱方式。列車運行過程的模型如式(5)-式(10)所示
Ti=Ti-1+dt
(5)
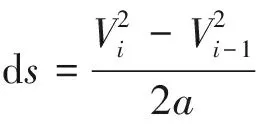
Si=Si-1+ds
(6)
(7)
(8)
0≤Vi≤Vmax
(9)

(10)
式中,Ti、Ti-1分別為i、i-1時刻列車運行總時間;Si、Si-1分別為i、i-1時刻的列車運行位移;a為列車運行的加速度值;Vi、Vi-1分別為i、i-1時刻的列車運行速度;Vmax為最大限速,包括線路的限速、車輛的最大運行速度、臨時限速,其值取三種限速的最小值;w(V)為列車單位基本阻力;wj(S)為列車所受的單位加算坡道附加阻力;fp(p,V)為牽引力函數;fb(b,V)為制動力函數。
以上式(5)和式(8)反映列車運行的正點停車。式(6)和式(7)反映列車運行的精準停車。式(9)反映的是列車運行過程的安全性模型。式(10)反映的是列車運行的動力學模型。
簡化后的高速列車節能優化模型如式(11)所示[5-6]
minE=∑E
(11)
式中,E為列車運行過程中總能耗;V為列車速度;fp(p,V)為牽引力函數;fb(b,V)為制動力函數;w(V)為列車單位基本阻力;wj(s)為列車所受的單位加算坡道附加阻力;x(0)為列車初始距離;x(T)為列車末端距離;v0(0)為列車初始速度;vT(S)為列車末端速度。
通過查閱文獻后,總結出了以下列車節能操縱的基本策略[7-9]。
(1)列車啟動階段:以最大加速度完成牽引過程。
(2)列車在區間運行階段:列車惰行的能耗等于自耗,是運行能耗最小的工況,因此盡量采用惰行工況。
(3)列車制動前利用惰行來減速。
(4)列車制動停車階段:以最大加速度完成制動過程。
(5)在列車滿足正點停車、精準停車要求的前提下,以較低技術速度運行。
2 操縱工況序列與ABC算法結合的節能優化
2.1 列車運行模式
列車運行通常有兩種操縱模式:節時模式和節能模式。其中節時模式是讓列車以最短時間完成運行計劃(即運行最大牽引力和最大制動力)[10],該模式下要求列車貼近限制速度運行,當速度大于限制速度值后惰行,當速度小于限制速度值后牽引,即在運行過程中達到最高的技術速度。而節能模式是讓列車選擇最低能耗的優化操縱方案,使得列車在保證列車安全運行、正點的前提下,以比較節能的操縱方式完成運行計劃[11]。本文以節時模式和優化后的節能模式進行對比來證明ABC算法優化后的能耗指標。
2.2 操縱工況序列的確定
基于操縱序列的列車節能操縱優化,其解為滿足正點停車、精準停車及安全運行等約束條件的列車最小能耗的工況轉換點位置,即為一個多維約束問題的優化。
列車在實際運行時,由于工況轉換次數是不確定的,因此可以采取若干個工況轉換序列進行操縱[10]。可以預先給定多種操縱工況序列,通過比較不同工況下的節能效果,以達到提高列車運行節能操縱優化的目的。假設本文節能操縱優化問題采取如下兩個工況轉換序列。
序列一:P1=(Pq1,Pd1,Pq2,Pd2,Pz)=(牽引、惰行、牽引、惰行、制動)。
序列二:P2=(Pq1,Pd1,Pq2,Pd2,Pz1,Pd3,Pz2)=(牽引、惰行、牽引、惰行、制動、惰行、制動)。
分別求解出不同工況轉換序列下對應的工況轉換速度點V1=(Vq1,Vd1,Vq2,Vd2)、V2=(Vq1,Vd1,Vq2,Vd2,Vz1,Vd3),比較兩者得到節能操縱優化問題的最優解。
2.3 人工蜂群算法
在現有的文獻中,通常用粒子群算法、蟻群算法、遺傳算法、神經網絡和其他智能群優化算法來求解非線性多維約束問題,而在節能操縱優化問題上,PSO算法是目前采用較多的優化方法,如文獻[12]的研究中,采用PSO算法對列車節能操縱進行優化且優化結果較好。
與傳統的群智能優化算法相比,人工蜂群算法(artificial bee colony algorithm, ABC)在搜索過程中對目標函數和約束幾乎沒有要求,僅以適應度函數作為進化的依據[13]。ABC算法具有操作簡單、開發能力較好、控制參數少、搜索能力較強且精度較高、魯棒性較強及易與其他算法結合等特點[14-18]。文獻[19]指出,ABC算法與遺傳算法(GA)、粒子群優化算法(PSO)和差分進化算法(DE)相比較,ABC算法的求解質量相對較好。為驗證ABC算法的優化性能,將其與PSO算法進行了比較。
采用基準測試函數Sphere函數對算法進行優化測試Sphere函數
式中,d為變量維數,取d=100。
算法的參數設置如下:PSO算法和ABC算法的群體規模N=50,迭代次數iter=2 000。PSO算法中學習因子c1=c2=1.5,速度最大值Vmax=1,速度最小值Vmin=-1;ABC算法中采蜜蜂和觀察蜂個數均為群體規模的一半,即N/2,蜜源停留最大限制搜索次數Limit=100。由算法參數設置的過程可以看出,除了通用的公共參數以外,ABC算法需要調整的參數較少,僅有一個蜜源停留最大限制搜索次數。
經過PSO算法和ABC算法優化結束后,其適應度進化曲線如圖1和圖2所示。其中PSO算法優化后f(x)的最小值為0.459 2×10-4;ABC算法優化后f(x)的最小值為1.462 64×10-5。
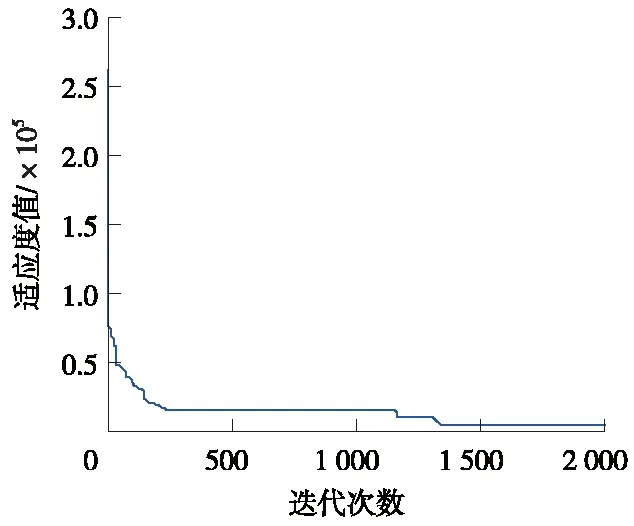
圖1 PSO適應度曲線
對比基準測試函數Sphere函數的仿真實驗結果,ABC算法對于求解函數極值尋優計算,收斂速度較快、且最優解的精度較高;PSO算法計算函數,常出現早熟現象、收斂性較弱、最優解的精度較低。由此可以得出,在函數極值尋優計算中ABC算法優于PSO算法。因此,本文將采用ABC算法對高速列車運行節能優化進行研究。
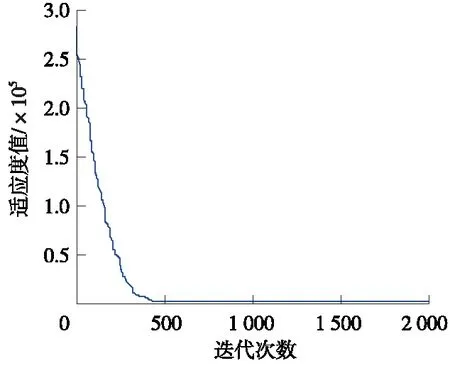
圖2 ABC適應度曲線
ABC算法將人工蜂群分為3種類型:采蜜蜂、觀察蜂和偵察蜂。采蜜蜂和觀察蜂的數量通常分別定義為蜜蜂總數的一半。蜜蜂蜜源的搜索主要包括3個階段。采蜜蜂階段:采蜜蜂發現蜜源,記錄蜜源的位置并測算蜜源的花蜜量(適應度函數值);觀察蜂階段:觀察蜂估量其獲得采蜜蜂分享的蜜源和蜜源花蜜量的信息后,以一定的概率選擇蜜源,并在其附近進行采蜜,尋找其他蜜源[12];偵查蜂階段:當一個蜜源被放棄時,采蜜蜂和觀察蜂轉化為偵查蜂并隨機尋找新的蜜源。列車運行節能優化的問題與ABC算法中主要概念的對應關系如表1所示。
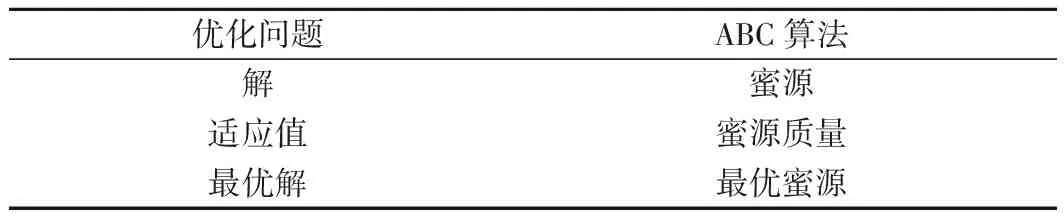
表1 概念對比
對于ABC算法蜂群的優化過程,其搜索空間通常設定為n維;蜜蜂種群總數為N;采蜜蜂種群規模為N/2;觀察蜂種群規模為N/2;最大迭代次數為maxCycle、有限次搜索值為Limit。在采蜜的過程中,采蜜蜂用式(12)進行鄰域搜索蜜源,用式(13)計算其適應度值fitness[20]。觀察蜂根據式(14)計算的跟隨概率Pi來選擇蜜源。
vij=xij+α(xij-xkj),i≠k
(12)
式中,xij為第i個解的第j個位置,vij為新蜜源位置,α為領域搜索系數,為0到1的隨機數。
(13)
(14)
2.4 人工蜂群算法與操縱工況序列結合的節能優化步驟
本文使用ABC算法對高速列車運行節能優化的具體步驟如下。
(1)蜜蜂種群的初始化:設置蜜蜂總數N(采蜜蜂的數量N/2,觀察蜂的數量N/2)、最大迭代次數maxCycle、有限次搜索值Limit和隨機產生的滿足速度變量取值范圍的初始速度。
(2)根據上述所確定的工況轉換序列得到列車運行速度-距離曲線程序,并調用列車運行速度-距離曲線子程序計算得到列車運行過程中的能量消耗,從而計算出蜜源的適應度值及滿足操縱工況關鍵轉換點的速度。
(3)采蜜蜂階段:采蜜蜂在蜜源附近搜索新蜜源并計算適應度值(適應度越小代表可行解的質量越小),若優于當前蜜源,則使用式(12)更新當前采蜜蜂所在的位置。
(4)觀察蜂階段:觀察蜂使用式(14)計算選擇概率Pi,每只觀察蜂以概率Pi尋找新蜜源,并轉化為采蜜蜂進行鄰域搜索,并計算適應度值。
(5)偵查蜂階段:判斷蜜源i是否滿足被放棄的條件。如果滿足,則對應的第i個采蜜蜂成為偵查蜂,并在解空間中隨機產生一個新的蜜源;否則直接轉到第(7)步。
(6)迭代過程:更新后的個體按照上述過程更新計算。
(7)判斷是否滿足停止準則,如果滿足,則輸出結果;否則轉到第(3)步繼續進行迭代更新。
3 實例驗證
為了驗證ABC算法在高速列車運行節能優化中的有效性,以CRH2型單質點高速列車為實驗仿真對象。ABC算法的具體參數設置如表2所示,仿真列車主要特性參數如表3所示[21]。

表2 ABC算法參數設置
對上述操縱工況轉換序列的仿真如下:
(1)運行實例1的節能優化分析
仿真運行實例1采用線路1的數據。線路1區間長度65.599 km,圖定運行時間1 740 s,線路限速200 km/h。列車在整個區間運行過程中采用操縱序列P1,即兩次牽引兩次惰行的運行策略,采用ABC算法求解該模型。其節時模式和經過ABC算法優化后的節能模式的運行曲線如圖3所示。
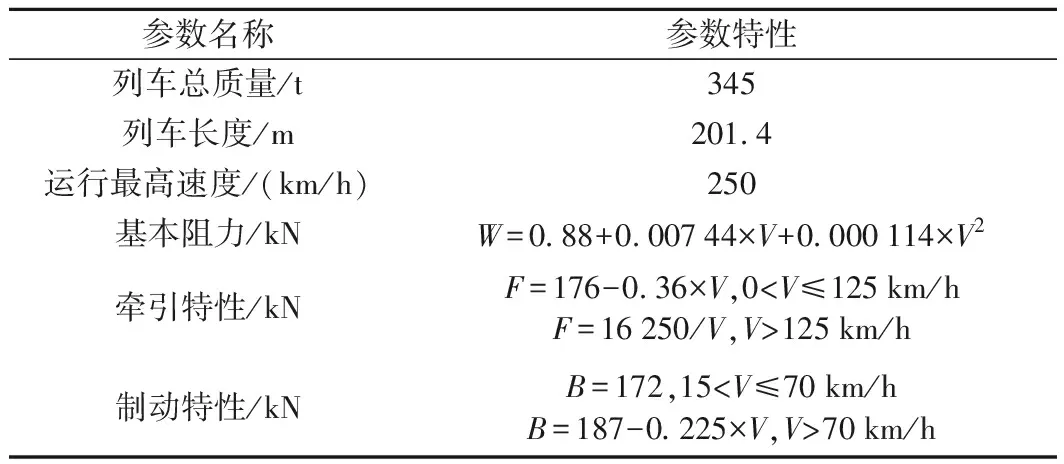
表3 仿真列車主要特性參數
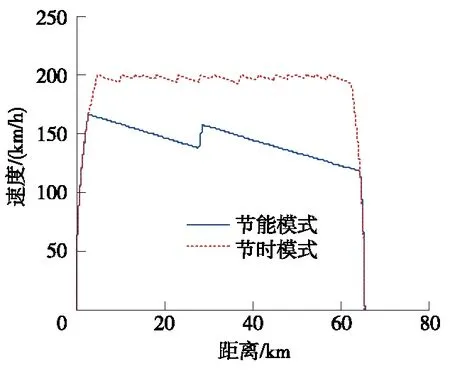
圖3 列車運行速度-距離曲線
其中優化后的牽引末端速度分別為Vq1=170.756 3 km/h,Vq2=164.465 5 km/h;惰行末端速度分別為Vd1=146.533 3 km/h,Vd2=126.505 4 km/h。優化前后的性能指標如表4所示。
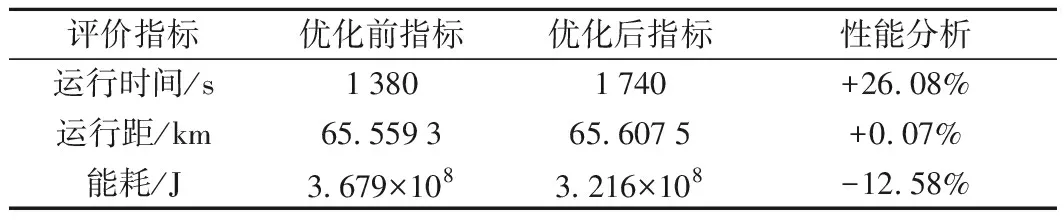
表4 性能指標與分析
通過對比節時模式和節能模式的仿真結果可知,無論是在節時模式運行下還是節能模式運行下,均滿足正點停車、精準停車的要求。且經過ABC算法優化后的節能模式相比較節時模式能耗節約了12.58%,節約效果良好。
(2)運行實例2的節能優化分析
仿真運行實例2采用線路2的數據。線路2區間長度為48.757 km,圖定運行時間1 200 s,線路限速200 km/h。列車在整個運行過程中采用操縱列車在整個區間運行過程中采用操縱序列P2,即牽引—惰行—牽引—惰行—制動—惰行—制動的運行策略,采用ABC算法求解該模型。其節時模式和經過ABC算法優化后的節能模式的運行曲線如圖4所示。
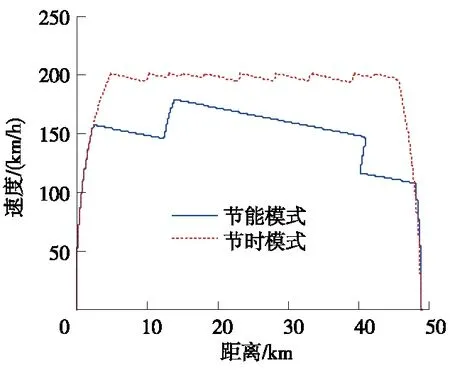
圖4 列車運行速度-距離曲線
其中優化后的牽引末端速度分別為Vq1=160.387 3 km/h,Vq2=182.280 2 km/h;惰行末端速度分別為Vd1=151.049 2 km/h,Vd2=153.300 5 km/h,Vd3=119.144 8 km/h;制動速度為Vz=110.144 8 km/h。優化前后的性能指標如表5所示。
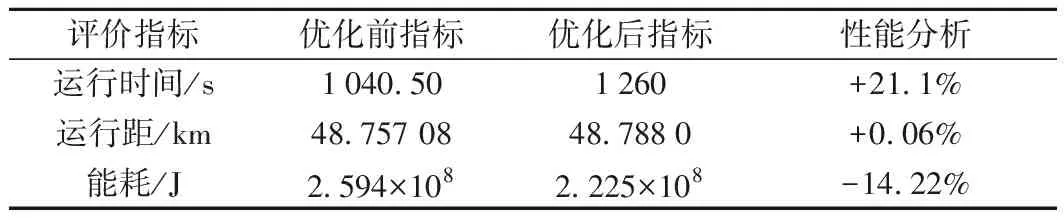
表5 性能指標與分析
通過對比節時模式和節能模式的仿真結果可知,無論是在節時模式運行下還是節能模式運行下,均滿足正點停車、精準停車的要求。且經過ABC算法優化后的節能模式相比較節時模式能耗節省14.22%,效果良好。
綜上所述,經過ABC算法優化后的結果均能滿足優化操縱方式的基本操縱策略且達到了良好的優化效果,能較好地解決列車節能操縱優化問題。因此本文建立的ABC算法節能操縱優化模型正確,且ABC算法在降低列車運行能耗方面的有效性得到驗證。
4 結論
(1)通過總結ABC算法在其他領域中的應用方法,詳細介紹了ABC算法并將ABC算法應用于列車節能駕駛策略的研究中。通過仿真實驗驗證,ABC算法在保證了高速列車在給定的運行區間、運行時間及運行速度下能夠使得列車滿足正點停車、精準停車的要求,且可以有效地解決高速列車運行過程中的節能問題。
(2)所使用的ABC算法具有操作簡單、開發能力較好、控制參數少、全局搜索能力強、收斂速度快、最優解的優化精度高且魯棒性較好等優點,但容易陷入局部最優。針對ABC算法容易陷入局部最優的缺點,需要進一步研究該算法的改進及與其他算法的融合,以提高算法局部搜索的優化性能。
(3)本文僅研究了離線狀態下的全局優化,僅給操縱人員提供可行的節能優化操縱策略,但并未考慮到列車實際運行中可能會出現的突發狀況,因此后續研究需考慮列車實際運行時,實現列車的實時速度控制。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
