一種TWS雷達天線水平度補償的設計方法
2019-08-26 05:04:42徐光輝
無線電工程 2019年9期
張 彪,任 旺,徐光輝
(上海航天電子技術研究所,上海 201109)
0 引言
根據復雜電磁環境的現狀和提供高精度目標指示的需求,機相掃描三坐標雷達的跟蹤精度是一個非常重要的指標。在探測目標過程中,影響雷達跟蹤精度的因素有很多,其中雷達所在平臺水平度的影響是一個不可忽視的因素。車載雷達整車調平及天線轉動帶來的晃動,陣面受風吹等都會影響雷達所在平臺的水平度,進而影響雷達的測角性能。要保證雷達處于一個穩定平臺上,在機械上實現比較復雜,耗費成本較高,在雷達信號處理的后端對平臺的水平度補償已經成為一個通用的模式。在雷達數據處理軟件中,對雷達檢測到的點跡數據進行水平度補償,實現簡單、成本低和穩定性高,能很好地滿足工程實際的需要。
1 TWS雷達分區處理原則
基于TWS系統的雷達將掃描區域平均分成n個,一般取16,24或32。每個區域稱之為扇區,分別為第0扇區,第1扇區,......,第n-1扇區,如圖1所示[1-3]。雷達數據處理在創建的扇區基礎上進行,包括點跡處理、航跡處理等。對空域已掃描過的扇區,用流水作業實現宏觀上的并行處理,當天線掃過一個扇區時,處理向前滑動一個扇區,重復一個流水作業[3-5]。
本文主要考慮雷達數據處理按扇區讀取到信號處理點跡數據后,利用天線水平數據,對點跡方位、俯仰進行補償的點跡處理問題。

圖1 TWS分區及工作過程
2 天線水平度補償方法
天線水平儀通常置于雷達天線安裝平臺上,能快速感知安裝平臺的水平姿態,并將實時水平姿態數據傳送至雷達系統。由于雷達所在平臺的車載坐標系與大地坐標系不重合,以及各種因素導致載體不能處在水平位置,因此,需要將雷達點跡由車載坐標系變換至大地坐標系下[5-7],需要根據天線水平度進行方位、俯仰維上的補償[6]。
2.1 坐標系規定
天線水平度補償時,需要規定幾個坐標系及若干參數的定義:
① 車載坐標系(Ac,Ec,R):其中,Ac為天線在車體的投影與車體中軸線的夾角,順時針為正;Ec為天線在車體的投影與天線的夾角,向上為正;R為斜距,即天線與目標的距離。
② 大地坐標系(A,E,R):其中,A為天線在水平面的投影與正北的夾角,順時針為正;E為天線在在水平面的投影與天線的夾角,向上為正;R為斜距,即天線與目標的距離。
③ 車頭方向(KD):KD為導航設備給出的整車方位(相對于正北)。
④ 方位碼盤值(Am):Am為天線轉動時所處的方位值(相對于車體中軸線的夾角)。
⑤ 橫傾、縱傾數據[8-10](GRx,GRy):伺服輸出的天線橫傾、縱傾規定:車頭高時縱傾GRy為正,車體右側低(行車方向)時橫傾GRx為正。
2.2 水平度補償方法
由于水平儀給出的車搖橫傾、縱傾數據的頻率比扇區頻率大,所以一個扇區內,可以接收若干組橫傾、縱傾數據。一個扇區內接收車搖橫傾、縱傾數據的形式如圖2所示。
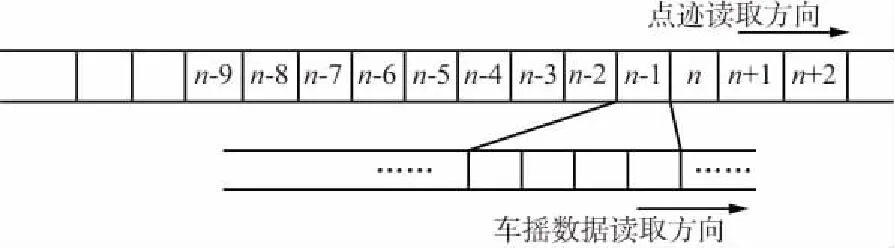
圖2 一個扇區內接收車搖橫傾、縱傾數據的形式
雷達在第n-1扇區內時,數據處理接收信號處理大地坐標系下的點跡(a,r,e),同時水平儀連續發送車搖數據,雷達伺服系統收集到車搖數據后,再連同伺服此時所知的車頭方向及方位碼盤值轉送若干組車搖數據(GRx,GRy,Am,KD)至數據處理。由于信號處理點跡是大地坐標系下的數據,沒有考慮天線平臺水平度的影響,需要在數據處理中利用車搖數據進行水平度補償[11-13],補償原理如圖3所示。
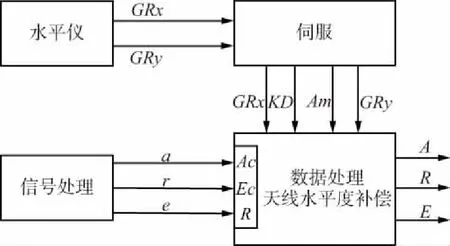
圖3 水平度補償原理
水平度補償的具體步驟如下:
① 車載坐標系與大地坐標系在方位上只相差一個車頭方向,可以先將信號處理按扇區讀取的點跡轉換到車載坐標系下時,轉換至車載坐標系下的坐標為(Ac,Ec,R):
Ac=a-KD ,
(1)
Ec=e,
(2)
R=r。
(3)
② 雷達數據處理根據點跡方位Ac以及車搖方位數據Am,尋找與方位Ac最接近的車搖方位數據Am1及Am2,找到方位Ac左右最近的2組車搖數據分別為(GRx1,GRy1,Am1,KD)和(GRx2,GRy2,Am2,KD),其中,Am1≤Ac≤Am2。
③ 根據車搖數據的方位碼Am偏離點跡方位Ac的值作為權重進行加權得到點跡方位Ac時的車搖參數。偏離方位差越大,所占的權重越小,反之,則權重越大。根據方位偏移值得到權重系數p1和p2:p1=Ac-Am1,p2=Am2-Ac。
根據權重系數計算得到點跡方位Ac時對應的車搖橫傾、縱傾數據:
(4)
(5)
④ 得到水平補償后的大地坐標下的點跡值[14-16](A,E,R),根據點跡數據及相對應的車搖數據,將車載坐標系下的點跡數據(Ac,Ec,R)轉換到大地坐標系下,得到補償后的點跡方位A、俯仰E:
(KD),
(6)
E=arcsin[cosEc·(sinGRy·cosAc-cosGRy·
sinGRx·sinAc)+cosGRy·cosGRx·sinEc],
(7)
式中,距離R保持不變。
經過以上幾個步驟,在信號處理點跡參數的基礎上,結合相應的車搖數據完成了雷達天線水平度的補償。這樣便于數據處理完成航跡處理等后續過程,得到高精度的目標跟蹤數據。
3 水平度補償結果分析
采集雷達天線水平儀的水平度數據,雷達掃描一周內采集的車體縱傾、橫傾數據如圖4所示。可以看出,隨著機-相掃描雷達在方位上的轉動,車體左右、前后的搖晃有時接近0.5°。一般以3°的波束寬度工作的單脈沖測角雷達,要求的精度為十分之一波束寬度(即0.3°)。此時,必須考慮車體橫傾、縱傾對雷達測角的影響[16]。
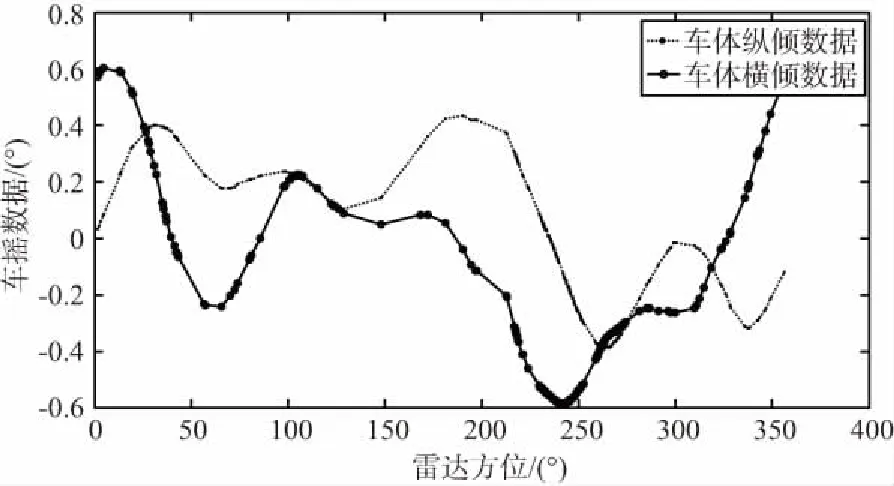
圖4 雷達掃描一周內采集的車體縱傾、橫傾數據
某車載三坐標搜索雷達的實際目標飛行試驗,通過水平補償前后,航跡濾波值與目標飛行真值數據的比較,分析雷達的精度。目標起始距離58.3 km,目標飛行高度800 m,速度190 m/s,檢查水平補償前后的精度變化。進行水平補償后,目標跟蹤濾波數據與真值的比較如圖5所示。
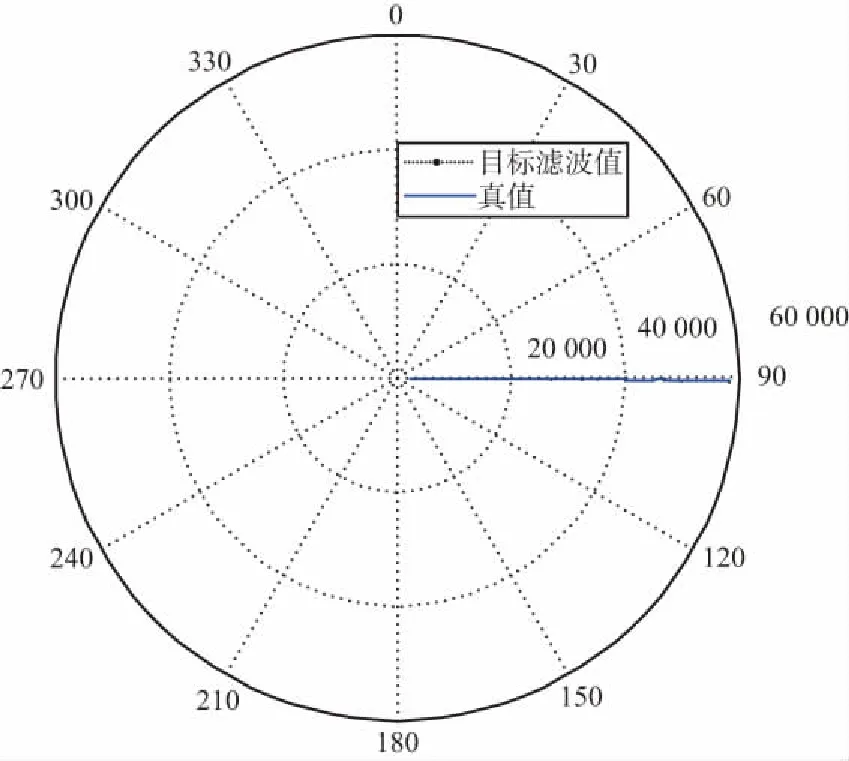
圖5 進行水平補償后,目標跟蹤濾波數據與真值的比較
3.1 水平補償前后一次差比較
將水平補償前后的目標跟蹤濾波數據與同時刻的真值數據進行比較,得到方位一次差、俯仰一次差如圖6,圖7所示[16-17]。
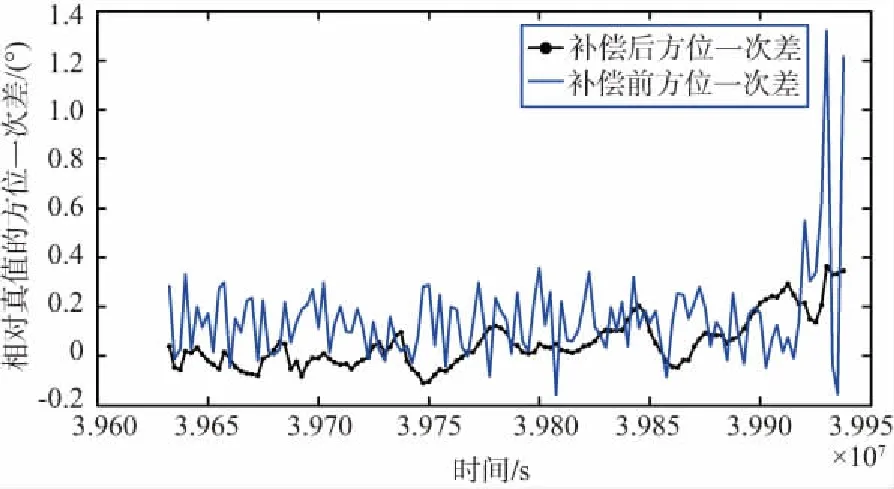
圖6 水平補償前后方位濾波值與真值的一次差
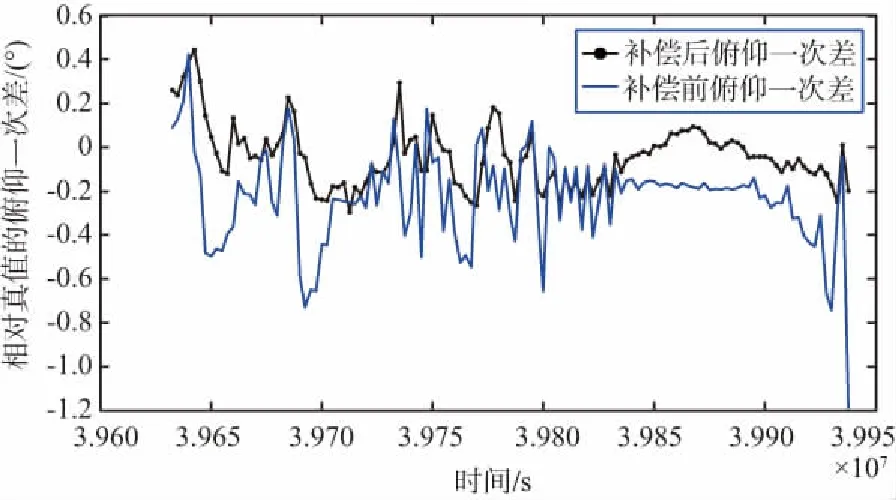
圖7 水平補償前后俯仰濾波值與真值的一次差
通過水平度補償后,航跡濾波數據與真值的一次差明顯減小。
3.2 水平補償前后精度對比
通過水平補償前后的雷達濾波數據與真值在方位及俯仰上做精度分析,分別得到方位及俯仰的系統誤差、起伏誤差和總誤差如表1所示。可見,通過這種水平補償方式,可以有效地提高雷達跟蹤精度[16-18]。
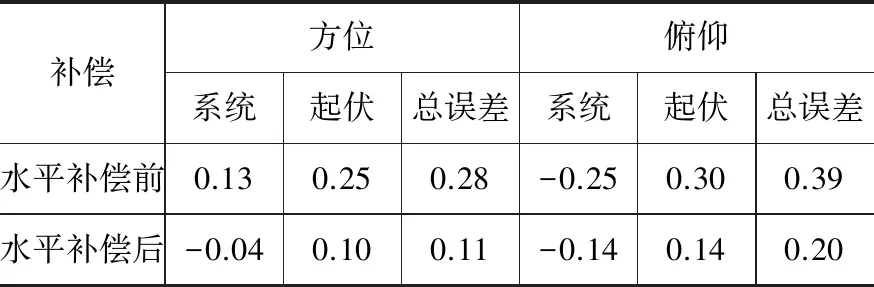
表1 水平補償前后雷達跟蹤精度對比 (°)
4 結束語
隨著武器系統對雷達精度提出的要求越來越高,雷達所在平臺水平度影響雷達的測量精度的問題需要得到進一步的重視。本文介紹的TWS雷達天線水平度補償設計方法,通過雷達數據處理后期處理,可以修正雷達信號處理前端測角帶來的誤差。通過實際飛行試驗進行了確認。該方法實現簡單清晰,便于計算機軟件實現,能有效地提高雷達的跟蹤精度。下一步的工作將主要研究天線平臺隨車移動以及不同的天線水平度對測角性能的影響。