求解最優月球軟著陸軌道的隱式打靶法
2019-08-15 03:01:18彭坤彭睿黃震張柏楠
航空學報 2019年7期
彭坤,彭睿,黃震,張柏楠
1.中國空間技術研究院 載人航天總體部,北京 100094 2.北京航空航天大學,北京 100083
近年來,各航天大國紛紛將月球探測與開發作為研究重點[1-2]。而實施月球軟著陸是月球資源開發、原位資源利用以及載人登月任務的基礎。月球軟著陸過程一般分為霍曼轉移段和動力下降段[3-4],其中動力下降段會消耗大量燃料,因此需設計燃料消耗最優動力下降段著陸軌道。
月球軟著陸軌道設計是一種終端時刻自由的最優控制問題,其主要求解方法分為3大類[5-6]:間接法、直接法和混合法。間接法是最早用來求解月球軟著陸軌道的方法,其利用龐特亞金極大值原理將最優控制問題轉化為兩點邊值問題進行求解[7]。該方法的不足是兩點邊值問題的求解會因初值敏感而很難收斂。更多的學者應用直接法求解月球軟著陸軌道,利用配點法[8-9]、函數逼近方法[10-11]以及偽譜法[12-14]將軌道狀態變量和控制變量離散化并作為優化變量,再采用序列二次規劃或智能尋優算法進行求解。直接法雖然收斂性好,但其求解時間隨計算精度的提高而增加;同時其是一種次優解法,燃料消耗非最優。混合法則利用間接法的最優控制律,將伴隨變量初值作為優化變量,采用非線性規劃[15]或智能優化算法[16-17]進行求解。其求解結果相比于直接法更接近最優解,同時計算量小;相比于間接法降低了初值敏感性。但混合法的尋優時間仍遠高于間接法的迭代求解時間,同時其舍棄了部分最優性條件,求解結果不能嚴格保證最優性,還需要與間接法結果進行比對。因此,只有間接法能求得理論最優解,同時其一旦能收斂,求解速度最快,計算精度最高。
為此,學者們開始重新研究通過間接法來求解最優月球軟著陸軌道問題,研究重點是對終端時刻的修正和收斂性強的兩點邊值問題求解方法。趙吉松等[18]采用線性攝動法[19]同時對伴隨變量初值和終端時刻進行修正。肖堯等[20]引入一種時間尺度變換方法[21]來解決終端時刻自由問題,借用MATLAB的bvp4c函數求解月球軟著陸兩點邊值問題。
為提高求解兩點邊值問題的收斂性,本文建立了月球軟著陸的歸一化系統模型,減少狀態變量之間和伴隨變量之間的量級差距。同時,采用時間尺度變換方法將終端時刻自由問題轉化為時間區間為[0,1]的終端時刻固定問題。進而把終端時刻看作狀態變量并引入哈密爾頓函數終端值作為隱式終端條件,將原顯式終端條件的兩點邊值問題轉化為隱式終端條件的兩點邊值問題。最后,采用變分法對隱式終端條件進行處理,提出一種隱式打靶法并對該問題進行求解,得到燃料消耗最優的月球軟著陸軌道,并分析了月球軟著陸過程中燃料消耗與著陸器發動機推重比之間的關系。
1 系統模型
忽略動力下降段的橫向偏差,采用二維極坐標系描述月球軟著陸過程,并以初始時刻月面著陸器的月心距和質量為參考量,可建立月球軟著陸過程的歸一化狀態方程為[17]
(1)
(2)

(3)
(4)
設月球軟著陸過程發動機一直開機,則月面著陸器的燃料消耗與飛行時間成正比,故可設性能指標為
(5)
2 隱式終端條件兩點邊值問題
2.1 最優控制問題向兩點邊值問題的轉化
利用龐特亞金極大值原理可得哈密爾頓函數H為
(6)
1) 最優推力方向角u控制律為
tanu=(-λvr)/(-λvθ)
(7)
2) 伴隨變量方程為
(8)
3) 由橫截條件[22]可推導出終端條件為
(9)
(10)
兩點邊值問題的邊界條件為
(11)

2.2 顯式終端條件向隱式終端條件的轉化

(12)
(13)

(14)
該邊界條件的最后一個終端約束與其他終端約束不同,它不是某個狀態變量的終端值,而是包含某些狀態變量的一個等式約束,屬于隱式終端條件。
3 隱式打靶法
3.1 隱式終端條件處理

(15)
隱式終端條件可簡單表示為
(16)
定義g(1)的變分[22]為
δg(1)=g*(1)-g(1)=-g(1)
(17)
式中:g*(1)為終端約束的真值,即g*(1)=0;g(1)為迭代計算值,存在誤差。另一方面,通過變分法則可得
(18)
式中:
(19)

(20)

(21)

(22)

A5x0=-g(1)
(23)
式中:
(24)
通過共軛函數法還可得到4個顯式終端條件的關系式,再加入式(23)可得
(25)
式中:
(26)
(27)
3.2 算法流程
隱式打靶法求解月球軟著陸軌道兩點邊值問題的步驟如下:

3) 判斷終止條件
(28)
是否滿足,若滿足,則停止迭代;若滿足第1分式,則求得最優解Y*(τ)=Y(k)(τ);若滿足第2分式,則迭代失敗,輸出失敗信息。否則,轉第4)步。
(29)
4 仿真驗證
月球軟著陸初始條件[10]為r0=1 753 km,θ0=0°,vr0=0 m/s,vθ0=(9.65×10-4·r0)m/s。終端約束為rf=1 738 km,vrf=0 m/s,vθf=0 m/s。月球引力常數為μL=4.902 75×1012m3/s2。以載人月面著陸器為例,設著陸器質量為m0=18 t,發動機推力為Ft=50 000 N,排氣速度為w=310×9.8 m/s。

由表1可知,隱式打靶法可以搜索到最優月球軟著陸軌道,收斂精度高,歸一化的終端約束精度可以達到10-10量級,且收斂時間短,僅為1 s左右。最終求得的載人月面著陸器的月球軟著陸過程總時間為486.5 s,燃料消耗為8 007.719 kg。圖1 給出了歸一化系統模型中4個狀態變量的變化曲線,圖2給出了對應的4個伴隨變量的變化曲線,圖3給出了軟著陸過程中推力方向角的變化曲線,圖4給出了間接法構造的哈密爾頓函數的變化曲線。由圖1可知,所求得的軌道嚴格滿足軟著陸的月心距、徑向速度、橫向速度約束。由圖2和圖4可知,所求得的軌道嚴格滿足間接法的式(9)的橫截條件要求,證明了其最優性。同時由圖2可知,由于系統模型的歸一化處理,伴隨變量的量級相差較小,更有利于問題求解過程的收斂。由圖3可知,推力方向角初始值在180°左右,說明λvr(0)<0和λvθ(0)>0,且|λvθ(0)|≥|λvr(0)|,驗證了初值猜測的合理性。
將隱式打靶法與直接法和混合法進行對比分析。直接法采用文獻[10]的插值函數逼近法將控制函數參數化,將燃料消耗作為性能指標,終端目標約束作為懲罰項,采用人工免疫算法進行求解。混合法采用文獻[17]的方法,將伴隨變量初值和飛行時間作為控制變量,評價函數與直接法相同,也采用人工免疫算法進行求解。3種方法的求解結果如表2所示。由表可看出,隱式打靶法的終端約束誤差比直接法和混合法小4~6個數量級,收斂時間也比直接法和混合法低2~3個數量級。直接法求解的燃料消耗大于隱式打靶法和混合法。混合法由于控制律與隱式打靶法相同,優化結果接近隱式打靶法結果。混合法求解時將終端約束設為評價函數的懲罰項予以考慮,用隨機搜索算法人工免疫算法進行搜索,在前期搜索中能快速收斂到最優解附近,但在后期搜索中局部收斂過程比較慢,無法將終端約束誤差控制得特別低。而隱式打靶法直接通過終端約束誤差修正控制變量,可以得到較低誤差的終端約束,故收斂精度高于混合法。
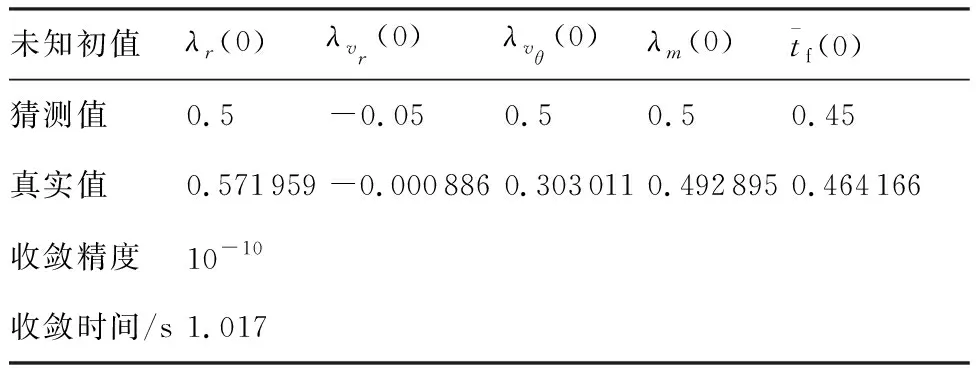
表1 隱式打靶法搜索結果Table 1 Search results of implicit shooting method
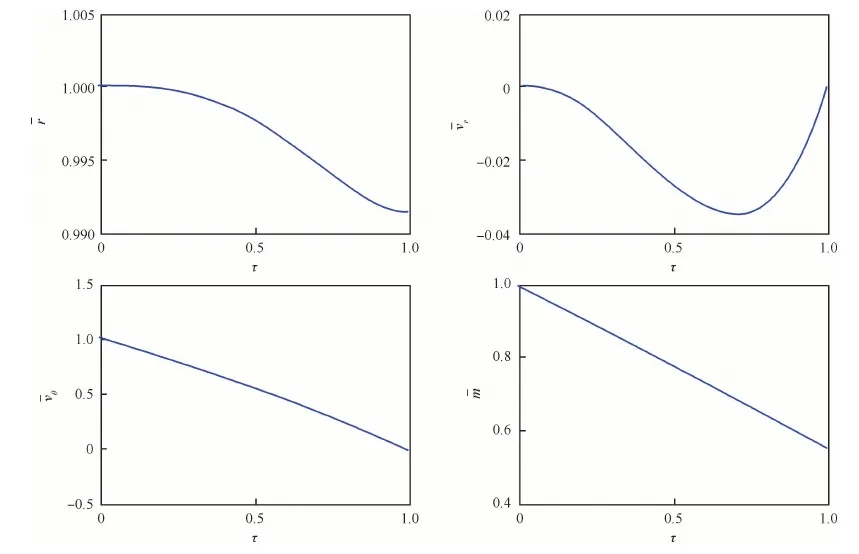
圖1 歸一化狀態變量隨時間變化曲線Fig.1 Temporal variation curves of normalization state variables
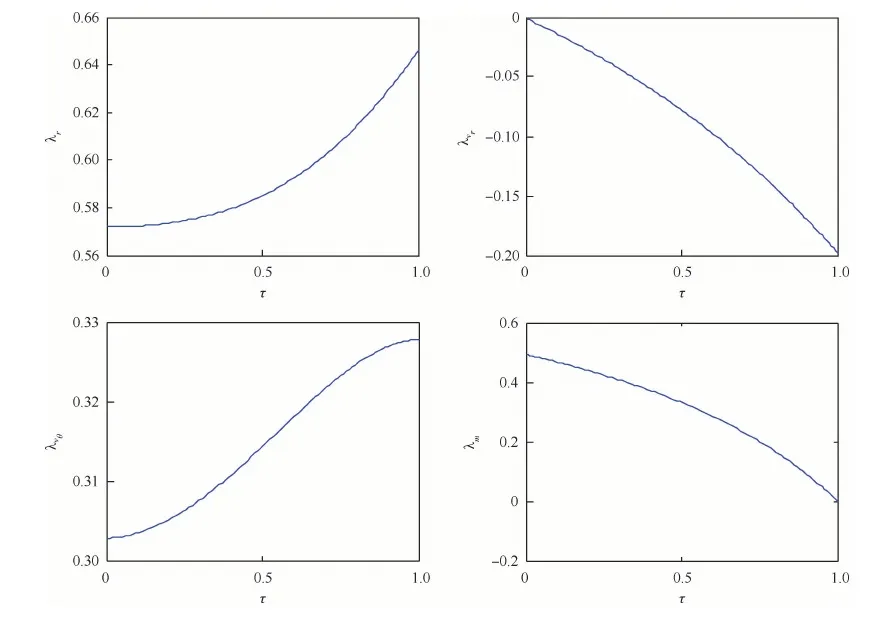
圖2 伴隨變量隨時間變化曲線Fig.2 Temporal variation curves of adjoint variables
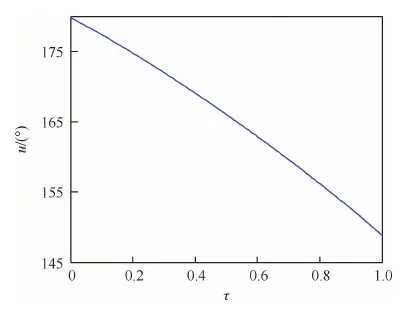
圖3 推力方向角隨時間變化曲線Fig.3 Temporal variation curves of thrust direction angle
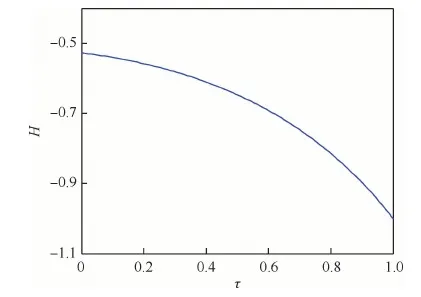
圖4 哈密爾頓函數隨時間變化曲線Fig.4 Temporal variation curves of Hamiltonian function

表2 隱式打靶法與直接法和混合法搜索結果對比Table 2 Comparisons of search results of implicit shooting method with direct method and hybrid method
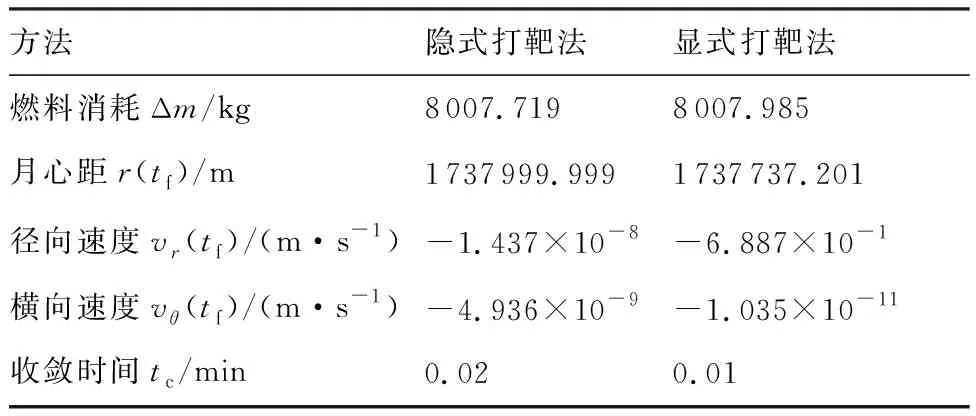
為進一步驗證隱式打靶法的收斂性,對η∈[0.1, 1.0](η=Ft/(m0g)為發動機推重比,g為
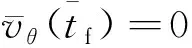
表3 隱式打靶法與顯式打靶法搜索結果對比
Table 3 Comparisons of search results of implicit shooting method with explicit shooting method
方法隱式打靶法顯式打靶法燃料消耗Δm/kg8007.7198007.985月心距r(tf)/m1737999.9991737737.201徑向速度vr(tf)/(m·s-1)-1.437×10-8-6.887×10-1橫向速度vθ(tf)/(m·s-1)-4.936×10-9-1.035×10-11收斂時間tc/min0.020.01

圖5 燃料消耗隨推重比變化曲線Fig.5 Variation curve of fuel consumption with thrust-weight ratio
5 結 論
1) 時間尺度變換法和本文推導的隱式打靶法的組合能夠快速而精確地求解出終端時刻自由的最優月球軟著陸軌道,與直接法和混合法相比,隱式打靶法優化精度高,收斂速度快。
2) 系統模型的歸一化處理減小了伴隨變量的量級差,進而縮小了伴隨變量的猜測范圍,同時結合隱式打靶法中伴隨變量初值和終端時刻的聯合修正,大大降低了迭代過程的敏感性,從而提高了間接法的收斂性。
3) 本文提出的隱式打靶法收斂性強,可適應參數值大范圍變化的月球軟著陸問題求解,也可應用于其他終端時刻自由的軌道優化問題求解。
4) 對于最優月球軟著陸軌道,推重比η∈[0.1,1.0]時,燃料消耗隨推重比增加先急劇減小后緩慢增大,推重比為0.6時燃料消耗最小,該變化趨勢可為載人月面著陸器下降級發動機選型提供參考。