雙重未知干擾解耦的多傳感器系統(tǒng)偏差校正與狀態(tài)估計(jì)
2019-08-15 03:02:06馮肖雪李淑慧潘峰
航空學(xué)報(bào) 2019年7期
馮肖雪,李淑慧,*,潘峰, 2
1. 北京理工大學(xué) 自動(dòng)化學(xué)院,北京 100081 2. 北京理工大學(xué) 昆明產(chǎn)業(yè)技術(shù)研究院,昆明 6501064
傳感器可以提供感興趣目標(biāo)在時(shí)間和空間上的信息,因而在目標(biāo)跟蹤、組合導(dǎo)航、容錯(cuò)控制以及工業(yè)監(jiān)控等領(lǐng)域應(yīng)用十分廣泛,其中傳感系統(tǒng)的狀態(tài)估計(jì)問(wèn)題日益引起人們的關(guān)注。但是在狀態(tài)估計(jì)過(guò)程中,由于系統(tǒng)參數(shù)的變動(dòng)、大型系統(tǒng)中的相互耦合項(xiàng)、系統(tǒng)動(dòng)態(tài)學(xué)中的非線性項(xiàng)、傳感器測(cè)量精度有限等因素引起系統(tǒng)建模模型誤差,往往影響狀態(tài)估計(jì)精度。一般而言,可將上述幾類引起建模誤差的因素統(tǒng)一視為未知干擾輸入。具有未知干擾輸入的隨機(jī)系統(tǒng)狀態(tài)估計(jì)問(wèn)題廣泛存在于控制、通信、信號(hào)處理和故障診斷等領(lǐng)域。目前解決含有未知干擾輸入的隨機(jī)系統(tǒng)狀態(tài)估計(jì)問(wèn)題的方法,大致可以分為以下幾類。
1) 狀態(tài)方程中含有未知干擾:文獻(xiàn)[1]針對(duì)直流電動(dòng)機(jī)的狀態(tài)估計(jì)和故障診斷問(wèn)題,通過(guò)解耦未知干擾輸入,借鑒遞歸濾波器的框架提出了魯棒的三步卡爾曼濾波算法,實(shí)現(xiàn)了最小方差無(wú)偏狀態(tài)估計(jì)和故障診斷。文獻(xiàn)[2]針對(duì)含有未知干擾、執(zhí)行器和傳感器故障的離散線性系統(tǒng),基于魯棒兩階濾波器估計(jì)狀態(tài)、生成觀測(cè)冗余,進(jìn)而采用貝葉斯二值假設(shè)檢驗(yàn)自適應(yīng)地診斷故障。但上述方法為實(shí)現(xiàn)未知干擾解耦對(duì)故障反饋矩陣的秩有著嚴(yán)格的約束條件。文獻(xiàn)[3]針對(duì)狀態(tài)方程中含有未知干擾的線性時(shí)變隨機(jī)系統(tǒng)聯(lián)合狀態(tài)估計(jì)與故障診斷問(wèn)題,通過(guò)將復(fù)雜不確定系統(tǒng)轉(zhuǎn)換為標(biāo)準(zhǔn)的帶故障和未知輸入的狀態(tài)空間模型,基于最小方差無(wú)偏準(zhǔn)則提出了遞歸五步濾波器來(lái)估計(jì)系統(tǒng)的狀態(tài)和故障,該算法對(duì)于故障反饋矩陣的秩沒(méi)有任何約束限制,但估計(jì)結(jié)果并非最優(yōu)。參考文獻(xiàn)[4]針對(duì)狀態(tài)方程含有未知干擾的不確定廣義系統(tǒng),通過(guò)將未知干擾擴(kuò)維到狀態(tài)向量中推導(dǎo)了最優(yōu)遞歸濾波器,但是該方法計(jì)算量大,實(shí)時(shí)性無(wú)法得到保證。
2) 量測(cè)方程中含有未知干擾:文獻(xiàn)[5]針對(duì)傳感器含未知輸入和相關(guān)噪聲的離散隨機(jī)線性系統(tǒng),設(shè)計(jì)了最小方差無(wú)偏狀態(tài)估計(jì)器,推導(dǎo)了任意兩個(gè)傳感器子系統(tǒng)之間的濾波誤差互協(xié)方差矩陣,給出了標(biāo)量加權(quán)分布式融合狀態(tài)濾波器。文獻(xiàn)[6]研究了含有量測(cè)丟失和未知量測(cè)干擾的多傳感器隨機(jī)不確定性系統(tǒng),設(shè)計(jì)了獨(dú)立于未知干擾的集中/分布式融合狀態(tài)估計(jì)器,但上述兩種方法均要求隨機(jī)干擾矩陣的秩不得超過(guò)傳感器量測(cè)維數(shù)。文獻(xiàn)[7]針對(duì)量測(cè)方程中含有未知干擾的線性時(shí)變系統(tǒng)設(shè)計(jì)了上界濾波器,通過(guò)凸優(yōu)化求解濾波上界的極小值獲得了最優(yōu)參數(shù)估計(jì)結(jié)果,但該方法要求量測(cè)新息協(xié)方差存在上界。
3)狀態(tài)和量測(cè)方程中均含有未知干擾:文獻(xiàn)[8] 將未知干擾簡(jiǎn)化為均值和方差未知的高斯項(xiàng),對(duì)未知干擾與狀態(tài)不獨(dú)立情況下的離散隨機(jī)系統(tǒng)提出了兩階期望最大化算法來(lái)辨識(shí)未知干擾。文獻(xiàn)[9]基于期望極大化方法提出了聯(lián)合狀態(tài)估計(jì)和未知輸入辨識(shí)的框架,用來(lái)計(jì)算系統(tǒng)未知輸入的條件期望,但該方法同樣假設(shè)未知干擾服從高斯分布。文獻(xiàn)[10]針對(duì)含有未知干擾的線性時(shí)變離散隨機(jī)系統(tǒng),提出了擴(kuò)維魯棒三階卡爾曼濾波對(duì)系統(tǒng)狀態(tài)和故障進(jìn)行同時(shí)估計(jì)。文獻(xiàn)[11]針對(duì)含有未知干擾、執(zhí)行器故障和傳感器故障的線性時(shí)變離散隨機(jī)系統(tǒng)的故障診斷和狀態(tài)估計(jì)問(wèn)題,提出了改進(jìn)的增廣魯棒三階卡爾曼濾波算法,但上述兩種算法均假設(shè)未知干擾建模為寬平穩(wěn)過(guò)程的隨機(jī)游走噪聲。
總結(jié)來(lái)看,針對(duì)狀態(tài)和量測(cè)方程中含有未知干擾的狀態(tài)估計(jì)問(wèn)題,目前的相關(guān)研究成果存在以下局限性:① 算法推導(dǎo)過(guò)程中對(duì)部分變量有著嚴(yán)格的假設(shè)或約束條件;② 通常假設(shè)未知干擾輸入具有高斯特性或者具有確定的分布特性;③ 通過(guò)歸并、擴(kuò)維等方法對(duì)未知干擾進(jìn)行估計(jì),算法非實(shí)時(shí)、復(fù)雜度高。因此,很有必要研究狀態(tài)方程含有未知干擾(無(wú)任何先驗(yàn)信息)、量測(cè)方程含有未知偏差(可視為一類特定的干擾)情況下的多傳感器在線狀態(tài)估計(jì)問(wèn)題。
本文設(shè)計(jì)了適用于狀態(tài)方程含未知干擾、量測(cè)方程含未知偏差的多傳感器最小方差無(wú)偏估計(jì)濾波器。組織結(jié)構(gòu)如下:第1節(jié)描述了狀態(tài)方程含未知干擾、量測(cè)方程含未知偏差的動(dòng)態(tài)離散系統(tǒng),并給出了本文研究的問(wèn)題。第2節(jié)針對(duì)狀態(tài)方程含未知干擾、量測(cè)方程含有未知偏差的動(dòng)態(tài)離散系統(tǒng)設(shè)計(jì)了雙重未知干擾解耦下的最小方差無(wú)偏估計(jì)濾波器。第3節(jié)給出了徑向飛行控制系統(tǒng)的仿真實(shí)例驗(yàn)證了本文提出算法的有效性。第4 節(jié)對(duì)論文工作進(jìn)行了總結(jié)。
1 問(wèn)題提出
狀態(tài)方程和量測(cè)方程帶有未知干擾輸入影響的線性離散系統(tǒng)可描述為
xk+1=Akxk+Bkμk+ζk+Ekdk
(1)
yi,k=Ci,kxk+ηi,k+Di,kbi,k
(2)

式(2)通過(guò)Di,kbi,k項(xiàng)來(lái)描述各種不同的傳感器量測(cè)建模不確定性。不失一般性,可以對(duì)未知的傳感器干擾或者偏差給出如下演化模型:
bi,k+1=Fi,kbi,k+vi,k+Gi,kui,k
(3)

說(shuō)明1 不失一般性,認(rèn)為Ek為列滿秩矩陣。因?yàn)榧幢鉋k不滿足列滿秩,依然可通過(guò)秩分解,Ekdk=E1,kE2,kdk,令第1項(xiàng)E1,k為列滿秩矩陣,而利用Ci,k+1來(lái)描述狀態(tài)模型所受的未知干擾輸入。通過(guò)Ekdk項(xiàng)除了可以描述加性干擾外,還可以用來(lái)描述各種不同的系統(tǒng)狀態(tài)建模不確定性,比如系統(tǒng)建模過(guò)程中的非線性項(xiàng)、線性化操作、模型降階簡(jiǎn)化、以及參數(shù)變化等引入的誤差。
說(shuō)明2 式(3)中定義的傳感器干擾或者偏差演變模型是普遍意義上的通用模型。若Fi,k=I,vi,k=0,Gi,k=0,則傳感器干擾或偏差為常值;若Fi,k=0,Gi,k=0,則傳感器干擾或偏差為服從零均值高斯分布的隨機(jī)值;若Fi,k≠0,Gi,k=0,則傳感器干擾或偏差模型為常見(jiàn)的時(shí)變系統(tǒng);若Gi,k≠0,則該演化模型可描述傳感器偏差或干擾受到未知輸入的影響,比如突發(fā)的階躍信號(hào)輸入等。
說(shuō)明3 參考文獻(xiàn)[12]中指出,可以通過(guò)對(duì)傳感器輸出信號(hào)進(jìn)行變換使其干擾項(xiàng)變?yōu)榱悖催M(jìn)行傳感器量測(cè)方程中的干擾或者偏差解耦,進(jìn)而將量測(cè)方程受輸入干擾的濾波器設(shè)計(jì)轉(zhuǎn)化為傳統(tǒng)的無(wú)干擾量測(cè)系統(tǒng)濾波器求解問(wèn)題。文獻(xiàn)[13-14]針對(duì)含有時(shí)不變的未知干擾輸入的系統(tǒng)設(shè)計(jì)了未知干擾解耦最優(yōu)觀測(cè)器,文獻(xiàn)[15-16]針對(duì)一類不含隨機(jī)噪聲的具有未知干擾或輸入的線性系統(tǒng)設(shè)計(jì)了未知輸入觀測(cè)器。但是本文研究的未知干擾輸入是時(shí)變的,同時(shí)傳感器量測(cè)受到隨機(jī)噪聲的污染,因此文獻(xiàn)[12-16]中的相關(guān)算法并不適用于本文。此外,本文中傳感器受到的干擾或者偏差bi,k是無(wú)法避免的,因?yàn)檫@是進(jìn)一步求解狀態(tài)估計(jì)的前提,不進(jìn)行傳感器量測(cè)值的校準(zhǔn),將導(dǎo)致狀態(tài)估計(jì)發(fā)生嚴(yán)重偏差甚至發(fā)散。
本論文的目的是設(shè)計(jì)適用于狀態(tài)方程含未知干擾、量測(cè)方程含未知偏差影響下的動(dòng)態(tài)隨機(jī)離散系統(tǒng)最小方差無(wú)偏估計(jì)濾波器。
2 雙重未知干擾解耦狀態(tài)估計(jì)器
本文針對(duì)狀態(tài)方程含未知干擾、量測(cè)方程含未知偏差的線性離散系統(tǒng)擬設(shè)計(jì)一種雙重未知干擾解耦下的最小方差無(wú)偏估計(jì)濾波器來(lái)估計(jì)多傳感器系統(tǒng)的狀態(tài)。最小方差無(wú)偏估計(jì)濾波器的設(shè)計(jì)主要包括兩步,第1步是設(shè)計(jì)傳感器量測(cè)偏差的最小方差無(wú)偏估計(jì)器:首先建立傳感器量測(cè)偏差系統(tǒng)模型,解耦線性離散系統(tǒng)方程中的未知干擾,然后設(shè)計(jì)最小方差無(wú)偏估計(jì)器,估計(jì)出量測(cè)偏差,進(jìn)而校正動(dòng)態(tài)系統(tǒng)測(cè)量值;第2步是設(shè)計(jì)未知干擾影響下線性離散系統(tǒng)的最優(yōu)狀態(tài)觀測(cè)器:根據(jù)量測(cè)偏差校正系統(tǒng)測(cè)量值,然后對(duì)量測(cè)干擾偏差校正后的系統(tǒng)設(shè)計(jì)最優(yōu)狀態(tài)觀測(cè)器,進(jìn)而獲得具有最小方差無(wú)偏意義下的狀態(tài)估計(jì),算法設(shè)計(jì)框架如圖1所示。
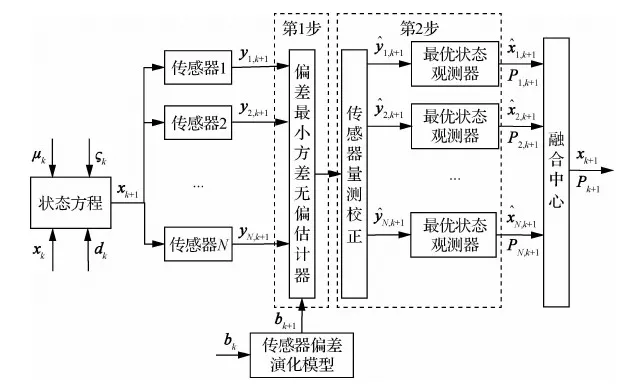
圖1 所提算法設(shè)計(jì)流程圖Fig.1 Flow chart of proposed algorithm
2.1 量測(cè)偏差最優(yōu)估計(jì)器設(shè)計(jì)
2.1.1 量測(cè)偏差系統(tǒng)模型
將式(1)代入式(2),得到k+1時(shí)刻第i個(gè)傳感器的量測(cè)方程為
yi,k+1=Ci,k+1xk+1+ηi,k+1+Di,k+1bi,k+1=
Ci,k+1(Akxk+Bkμk+ζk+Ekdk)+
ηi,k+1+Di,k+1bi,k+1
(4)
利用傳感器量測(cè)方程和傳感器偏差演變方程可以構(gòu)造傳感器偏差系統(tǒng)模型,即對(duì)N個(gè)傳感器的量測(cè)進(jìn)行線性組合,可得偏差系統(tǒng)模型為
q1y1,k+1)=(CN,k+1-qN-1CN-1,k+1-…-
q1C1,k+1)(Akxk+Bkμk+ζk+Ekdk)+
(ηN,k+1-qN-1ηN-1,k+1-…-q1η1,k+1)+
(DN,k+1bN,k+1-qN-1DN-1,k+1bN-1,k+1-…
-q1D1,k+1b1,k+1)
(5)
式中:qi∈R (i=1,2,…,N-1)為第i個(gè)傳感器的加權(quán)系數(shù),并且0≤qi≤1。為了實(shí)現(xiàn)上述構(gòu)造的偏差系統(tǒng)模型與目標(biāo)狀態(tài)解耦,需要消除目標(biāo)狀態(tài)信息,即式(5)中的第1項(xiàng)系數(shù)應(yīng)為0,即
CN,k+1-qN-1CN-1,k+1-…-q1C1,k+1=0
(6)
此時(shí),式(5)可寫為如下形式,定義為偏差系統(tǒng)模型的量測(cè)方程:
(DN,k+1bN,k+1-qN-1DN-1,k+1bN-1,k+1-…
-q1D1,k+1b1,k+1)=Hk+1bk+1+wk+1
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)


將式(3)中N個(gè)傳感器的系統(tǒng)偏差改為擴(kuò)維的形式:
(15)
式中:
綜合式(7)與式(15)便構(gòu)成了系統(tǒng)偏差模型。基于該模型,下面設(shè)計(jì)解耦濾波器進(jìn)行系統(tǒng)偏差估計(jì)。
2.1.2 未知輸入解耦的量測(cè)偏差估計(jì)器設(shè)計(jì)
依據(jù)2.1.1節(jié)給出的偏差系統(tǒng)模型,本節(jié)給出一種基于最小方差無(wú)偏準(zhǔn)則的量測(cè)偏差估計(jì)方法。該方法首先將量測(cè)偏差的未知輸入部分進(jìn)行解耦,使偏差與未知輸入無(wú)關(guān);隨后,基于解耦后的偏差系統(tǒng)模型設(shè)計(jì)一個(gè)最小方差無(wú)偏估計(jì)器。
(16)
式中:
證明:見(jiàn)附錄A。
定理2 基于式(7)與式(16),可得最小方差無(wú)偏估計(jì)濾波器為
(17)
(18)
(19)
(20)
(21)
證明:見(jiàn)附錄B。
2.2 未知干擾解耦的最優(yōu)狀態(tài)觀測(cè)器設(shè)計(jì)
傳感器偏差校正后的動(dòng)態(tài)系統(tǒng)模型為
(22)

(23)


(24)
(25)
(26)
(27)
(28)
Mi,k+1=Ek(Ci,k+1Ek)?
(29)
Ti,k+1=I-Mi,k+1Ci,k+1
(30)
證明:見(jiàn)附錄C。
(31)


(32)
證明:見(jiàn)附錄D。
基于簡(jiǎn)單凸組合融合算法實(shí)現(xiàn)N個(gè)傳感器的狀態(tài)融合:
(33)
2.3 所提方法實(shí)現(xiàn)步驟
基于2.1節(jié)和2.2節(jié)的推導(dǎo)和證明,針對(duì)多傳感器線性離散系統(tǒng),本文所提的雙重未知干擾解耦的最小方差無(wú)偏估計(jì)濾波器的計(jì)算步驟如表1所示。
表1 雙重未知干擾解耦下的狀態(tài)估計(jì)濾波器
Table 1 Minimum variance and unbiased estimate filter with dual-decoupling unknown interference
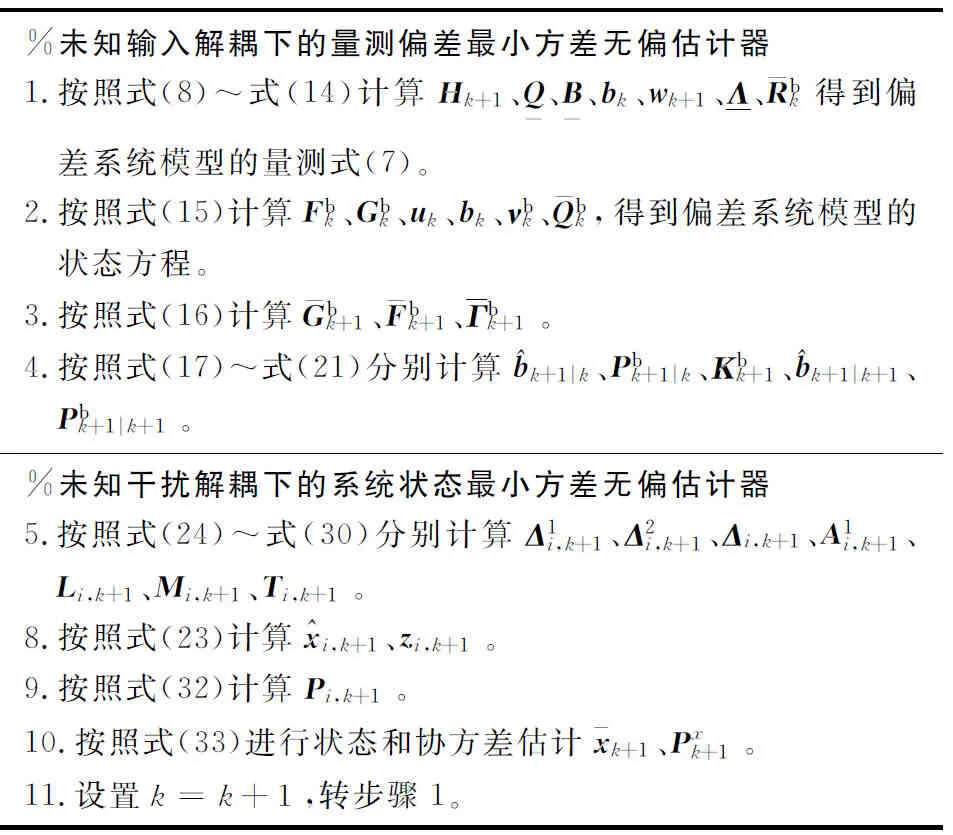
%未知輸入解耦下的量測(cè)偏差最小方差無(wú)偏估計(jì)器1.按照式(8)~式(14)計(jì)算Hk+1、Q-、B-、bk、wk+1、Λ、Rbk得到偏差系統(tǒng)模型的量測(cè)式(7)。2.按照式(15)計(jì)算Fbk、Gbk、uk、bk、νbk、Qbk,得到偏差系統(tǒng)模型的狀態(tài)方程。3.按照式(16)計(jì)算Gbk+1、Fbk+1、Γbk+1。4.按照式(17)~式(21)分別計(jì)算^bk+1|k、Pbk+1|k、Κbk+1、^bk+1|k+1、Pbk+1|k+1。%未知干擾解耦下的系統(tǒng)狀態(tài)最小方差無(wú)偏估計(jì)器5.按照式(24)~式(30)分別計(jì)算Δ1i,k+1、Δ2i,k+1、Δi,k+1、A1i,k+1、Li,k+1、Mi,k+1、Ti,k+1。8.按照式(23)計(jì)算^xi,k+1、zi,k+1。9.按照式(32)計(jì)算Pi,k+1。10.按照式(33)進(jìn)行狀態(tài)和協(xié)方差估計(jì)xk+1、Pxk+1。11.設(shè)置k=k+1,轉(zhuǎn)步驟1。
3 實(shí)驗(yàn)仿真部分
飛行器徑向飛行控制系統(tǒng)簡(jiǎn)化后的線性離散時(shí)間系統(tǒng)模型[12]為
xk+1=Akxk+Bkμk+ζk+Ekdk
Ekdk=ΔAkxk+ΔBkμk=
本文分別采用兩組加速度計(jì)和垂直陀螺儀來(lái)測(cè)量飛行速度、俯角和俯角率,系統(tǒng)量測(cè)方程為
3.1 量測(cè)偏差估計(jì)結(jié)果及分析
本節(jié)對(duì)所提出的未知輸入解耦的量測(cè)偏差最小方差無(wú)偏估計(jì)器的有效性進(jìn)行驗(yàn)證。圖2和圖3 給出了與廣義最小二乘(Generalized Least Square, GLS)[17]和卡爾曼濾波(Kalman Filter, KF)[18]兩個(gè)方法的量測(cè)偏差估計(jì)結(jié)果對(duì)比。從圖2和圖3可以看出本文所提方法(Decoupled method)由于對(duì)傳感器偏差的未知輸入進(jìn)行了解耦設(shè)計(jì),進(jìn)而基于傳感器偏差動(dòng)態(tài)演化模型可以很好地跟蹤上兩個(gè)傳感器各個(gè)維度上的動(dòng)態(tài)偏差值,這反映了本文提出的量測(cè)偏差最小方差無(wú)偏估計(jì)器的有效性。同樣基于動(dòng)態(tài)模型估計(jì)的KF方法由于忽略了偏差動(dòng)態(tài)演化模型中的未知輸入部分,而導(dǎo)致估計(jì)效果不佳。基于量測(cè)信息估計(jì)的GLS方法,不需要利用偏差動(dòng)態(tài)演化模型,僅利用包含了系統(tǒng)偏差未知輸入的全部測(cè)量信息,因此估計(jì)效果基本可以接受,但相比本文所提的Decoupled method仍有較大差距。
為了更清晰地對(duì)比3種方法的估計(jì)性能,圖4 和圖5給出了100次蒙特卡羅仿真下兩個(gè)傳感器各個(gè)維度上的量測(cè)偏差估計(jì)RMSEs。可以看出本文所提Decoupled method在兩個(gè)傳感器各個(gè)維度上的量測(cè)偏差估計(jì)RMSEs最小,而KF方法和GLS方法在偏差由于未知輸入而發(fā)生突變時(shí)估計(jì)結(jié)果有較大波動(dòng)。同時(shí)表2給出了不同算法偏差估計(jì)性能比較,可以看出本文所提的Decoupled method的平均RMSEs,相比基于量測(cè)信息估計(jì)的GLS方法至少提升了6.5%的性能,相比基于模型估計(jì)的KF方法至少提升了17%的性能,這驗(yàn)證了本文所提Decoupled method方法在處理帶有未知輸入干擾下的傳感器偏差估計(jì)問(wèn)題上明顯的優(yōu)越性。從運(yùn)算時(shí)間上可以看出,本文所提的Decoupled method相比其他兩個(gè)方法計(jì)算復(fù)雜度僅有略微的增加,這是可以接受的。
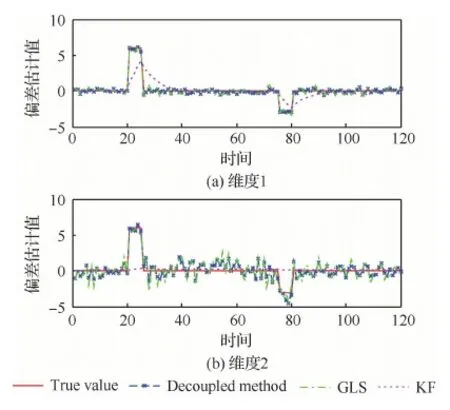
圖2 傳感器1量測(cè)偏差估計(jì)方法對(duì)比Fig.2 Comparison of bias estimate methods in Sensor 1
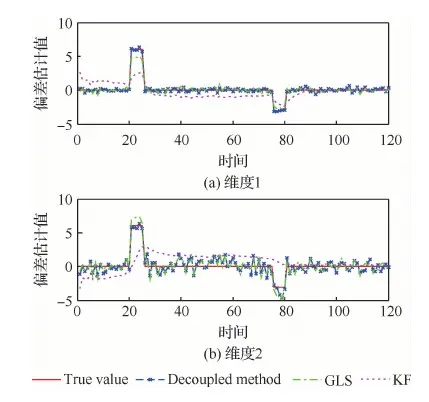
圖3 傳感器2量測(cè)偏差估計(jì)方法對(duì)比Fig.3 Comparison of bias estimate method in Sensor 2
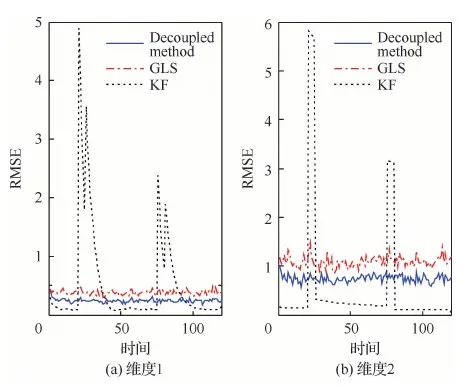
圖4 傳感器1量測(cè)偏差估計(jì)RMSEs對(duì)比Fig.4 Comparison of bias estimate RMSEs in Sensor 1
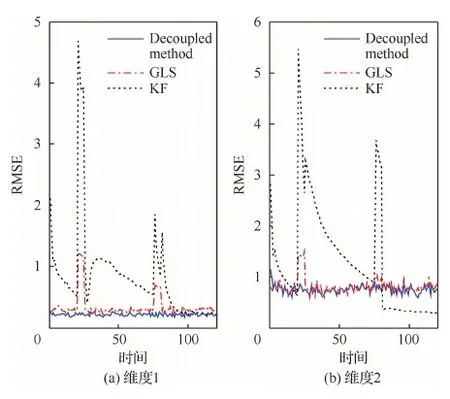
圖5 傳感器2量測(cè)偏差估計(jì)的RMSEs對(duì)比Fig.5 Comparison of bias estimate RMSEs in Sensor 2
表2 不同方法量測(cè)偏差估計(jì)性能比較Table 2 Comparison of performance of bias estimate
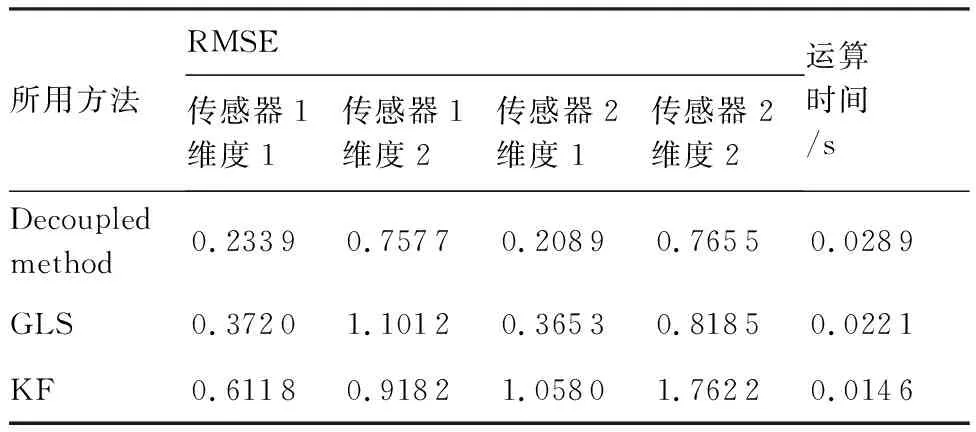
所用方法RMSE傳感器1維度1傳感器1維度2傳感器2維度1傳感器2維度2運(yùn)算時(shí)間/sDecoupledmethod0.23390.75770.20890.76550.0289GLS0.37201.10120.36530.81850.0221KF0.61180.91821.05801.76220.0146
3.2 系統(tǒng)狀態(tài)估計(jì)結(jié)果及分析
本節(jié)對(duì)所提出的未知干擾解耦下的系統(tǒng)狀態(tài)最小方差無(wú)偏估計(jì)器的有效性進(jìn)行驗(yàn)證,并與未進(jìn)行干擾解耦的聯(lián)邦卡爾曼濾波器[19](Federated Kalman Filter, FKF)和未進(jìn)行傳感器偏差校正的方法(Decoupled method without Bias Compensation, DMBC)進(jìn)行對(duì)比。圖6為不同方法在單次仿真下多傳感器狀態(tài)估計(jì)結(jié)果對(duì)比圖。可以看出DMBC方法由于未進(jìn)行傳感器偏差補(bǔ)償,導(dǎo)致在傳感器偏差發(fā)生突變時(shí)不能正確地進(jìn)行狀態(tài)估計(jì),而FKF方法由于未考慮狀態(tài)演化模型中的未知輸入部分,導(dǎo)致整體估計(jì)效果不佳。而本文所提的Decoupled method不僅對(duì)狀態(tài)演化模型中的未知輸入進(jìn)行解耦設(shè)計(jì),同時(shí)對(duì)傳感器偏差進(jìn)行補(bǔ)償,因此本文提出的最小方差無(wú)偏估計(jì)器估計(jì)結(jié)果更貼近真實(shí)的系統(tǒng)狀態(tài),這進(jìn)一步驗(yàn)證了本文提出方法的有效性。
為了更清晰地對(duì)比3種方法的估計(jì)性能,圖7 給出了不同方法在100次蒙特卡羅仿真下狀態(tài)估計(jì)RMSEs結(jié)果對(duì)比。表3給出了不同方法狀態(tài)估計(jì)平均RMSEs以及運(yùn)算時(shí)間的統(tǒng)計(jì)結(jié)果。可以看出,本文所提的Decoupled method方法在動(dòng)態(tài)系統(tǒng)狀態(tài)3個(gè)分量(俯仰角,俯仰角速度,速度)的RMSEs都明顯優(yōu)于其他2種方法。本文所提Decoupled method方法相比DMBC方法至少提升了17%的估計(jì)性能,相比FKF方法至少提升了65%的估計(jì)性能,這進(jìn)一步反映了本文所提的未知干擾解耦下的系統(tǒng)狀態(tài)最小方差無(wú)偏估計(jì)器的優(yōu)越性。同時(shí)值得說(shuō)明的是,本文所提Decoupled method方法的運(yùn)算時(shí)間是最長(zhǎng)的,是以犧牲計(jì)算量為代價(jià)來(lái)?yè)Q取估計(jì)性能的提升。
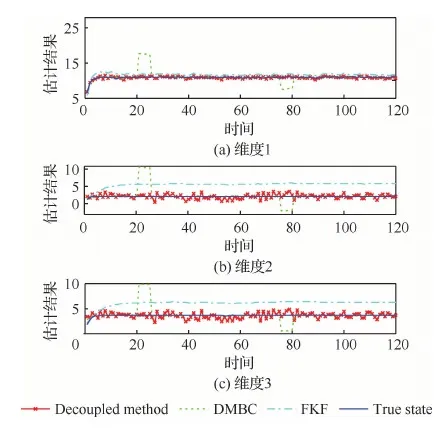
圖6 有/無(wú)偏差補(bǔ)償下狀態(tài)估計(jì)結(jié)果Fig.6 State estimate results with and without bias compensation
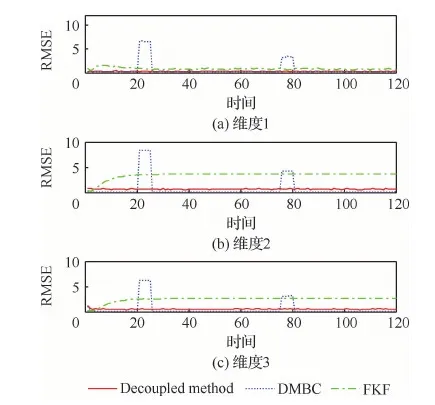
圖7 有/無(wú)偏差補(bǔ)償下狀態(tài)估計(jì)RMSEsFig.7 State estimate RMSEs with and without Bias compensation
表3 不同方法狀態(tài)估計(jì)性能比較
Table 3 Comparison of performance of state estimate using different method
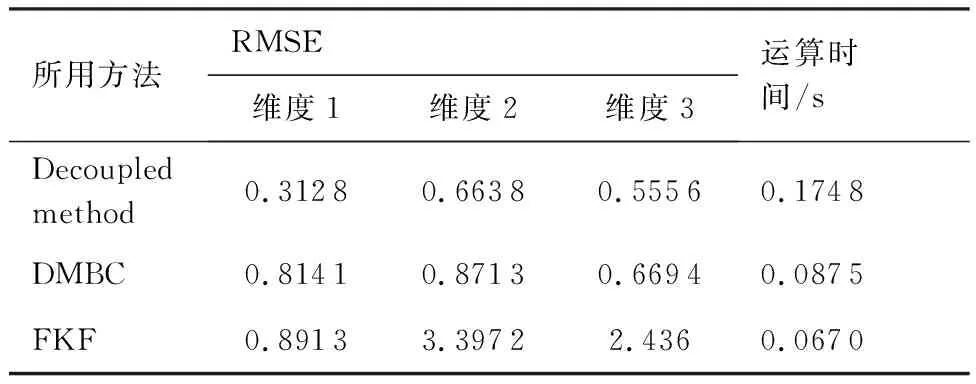
所用方法RMSE維度1維度2維度3運(yùn)算時(shí)間/sDecoupled method0.31280.66380.55560.1748DMBC0.81410.87130.66940.0875FKF0.89133.39722.4360.0670
4 結(jié) 論
本文針對(duì)狀態(tài)方程含有未知干擾、量測(cè)方程含有未知偏差情況下的多傳感器狀態(tài)估計(jì)問(wèn)題開展了研究,得到如下結(jié)論:
1) 基于量測(cè)偏差通用演化模型實(shí)現(xiàn)了偏差演化模型中的未知輸入解耦,進(jìn)而設(shè)計(jì)了最小方差無(wú)偏估計(jì)器對(duì)量測(cè)干擾偏差進(jìn)行估計(jì)。
2) 利用估計(jì)出的量測(cè)偏差進(jìn)行動(dòng)態(tài)系統(tǒng)測(cè)量值校正,根據(jù)量測(cè)干擾偏差校正后的系統(tǒng)模型設(shè)計(jì)了最優(yōu)狀態(tài)觀測(cè)器,獲得了具有最小方差無(wú)偏準(zhǔn)則下的狀態(tài)估計(jì)。
附錄A
將式(15)左右同時(shí)乘以傳感器偏差模型量測(cè)矩陣Hk+1,可得
(A1)
由式(7)可知
(A2)
聯(lián)立式(A1)和式(A2),可得
(A3)
由式(A3)可得出uk的通解為
(A4)

將式(A4)代入式(15),可得
(A5)

(A6)


(A7)
證畢。
附錄B
(B1)
(B2)
(B3)
(B4)
因此,
(B5)
將式(B5)代入式(B1)~式(B4)中進(jìn)行化簡(jiǎn),可得
(B6)
證畢。
附錄C
將最優(yōu)狀態(tài)觀測(cè)器應(yīng)用于具有未知干擾的隨機(jī)系統(tǒng),即將式(23)代入式(22)中,狀態(tài)估計(jì)誤差為
xk+1-(zi,k+1+Mi,k+1(Ci,k+1xk+1+ηi,k+1+
(I-Mi,k+1Ci,k+1)(Akxk+Bkμk+ζk+Ekdk)-
Mi,k+1Ci,k+1)ζk-[Li,k+1-(I-Mi,k+1Ci,k+1)·
(I-Mi,k+1Ci,k+1)Ekdk-[Ti,k+1-
(I-Mi,k+1Ci,k+1)]Bkμk
(C1)
當(dāng)rank(Ci,k+1Ek)=rank(Ek)成立時(shí),Ci,k+1Ek為一列滿秩矩陣(因?yàn)榫仃嘐k作為未知干擾輸入矩陣,默認(rèn)為列滿秩矩陣),則Ci,k+1Ek存在左逆矩陣,即
(Ci,k+1Ek)?=[(Ci,k+1Ek)TCi,k+1Ek]-1(Ci,k+1Ek)T
定義Mi,k+1=Ek(Ci,k+1Ek)+,則有
Mi,k+1Ci,k+1Ek=Ek(Ci,k+1Ek)+Ci,k+1Ek=
Ek[(Ci,k+1Ek)TCi,k+1Ek]-1(Ci,k+1Ek)T·
Ci,k+1Ek=Ek
即公式Ek=Mi,k+1Ci,k+1Ek恒成立。
再定義
(C2)

證畢。
附錄D
由式(C2),可得狀態(tài)估計(jì)協(xié)方差矩陣為


(D1)

(D2)
令
(D3)
則協(xié)方差矩陣為

由式(D2)與式(D3)可得
(D4)
此時(shí),狀態(tài)估計(jì)協(xié)方差矩陣由式(D5)給出
(D5)
證畢。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34