行李表面主被動柔順貼標方法研究
2019-08-14 10:02:28姚錦博田忠武
計算機應(yīng)用與軟件 2019年8期
關(guān)鍵詞:環(huán)境
武 偉 姚錦博 田忠武
(中國民航大學航空工程學院 天津 300300)
0 引 言
乘機旅客在辦理行李自助托運業(yè)務(wù)時,需要自行完成行李標簽的打印、拴貼等工作,過程繁瑣,效率較低。隨著智能技術(shù)的發(fā)展,將機器人技術(shù)引入自動貼標領(lǐng)域,由機器人完成這一系列的工作,可以有效提高行李托運的效率。圖1所示為本文研制的可適用于不同行李的自動貼標機構(gòu),其具有標簽實時打印、自動剝離與柔性貼標等功能。

圖1 行李自動貼標機
旅客行李的式樣繁多,箱體材質(zhì)與表面幾何尺寸難以預(yù)先確定,并且針對不同的行李,其貼標位置也不同,故采用機器人貼標,需要考慮在環(huán)境參數(shù)不確定的情況下貼標裝置與行李表面接觸作業(yè)的問題。若接觸力過大,會導(dǎo)致旅客行李的損壞,造成不必要的經(jīng)濟損失;若接觸力過小,則標簽與行李表面的粘合力過小,造成標簽在運輸過程中脫落,最終導(dǎo)致旅客行李的丟失。
柔順控制本質(zhì)上是實現(xiàn)力和位置的混合控制,相較于傳統(tǒng)的位置控制,為控制系統(tǒng)增加了柔性[1],柔順控制分為主動柔順和被動柔順兩類[2]。其中被動柔順控制是指借助輔助機構(gòu)產(chǎn)生對環(huán)境接觸力的自然順應(yīng);主動柔順控制是指根據(jù)壓力傳感器的反饋信息按一定的策略去主動控制力[2]。常見的柔順控制方法有阻抗控制、力/位混合控制和智能控制等[3]。針對上述機器人貼標過程所面臨的問題,本文借鑒柔順控制的思想,設(shè)計了一套柔順貼標機構(gòu),利用機構(gòu)的柔性有效降低貼標過程中外力的干擾,并采用阻抗控制方法實現(xiàn)力的跟蹤。阻抗控制是指通過調(diào)節(jié)力和位置的動態(tài)關(guān)系來滿足力控制的要求[4],傳統(tǒng)的阻抗控制是建立在理想化的條件下,即機器人控制參數(shù)與環(huán)境參數(shù)精確已知的前提下,缺乏對未知環(huán)境的自適應(yīng)性,對上述貼標過程并不適用。為此,本文在阻抗控制的基礎(chǔ)上研究一種基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)阻抗控制方法,在阻抗方程中增設(shè)自適應(yīng)項,通過更新阻抗參數(shù)來提高控制系統(tǒng)的魯棒性,可以適應(yīng)環(huán)境信息的變化,并利用神經(jīng)網(wǎng)絡(luò)可以逼近任意非線性函數(shù)的特性[6],補償機器人動力學建模的不確定性。利用MATLAB/Simulink搭建了二連桿機器人的仿真實驗平臺,驗證所提方法的有效性。結(jié)果表明,該方法面對環(huán)境參數(shù)不確定的問題具有良好的力跟蹤效果,可以更好地適應(yīng)行李表面環(huán)境,確保貼標的可靠性。
1 主被動柔順貼標方案
1.1 被動柔順貼標機構(gòu)
柔順機構(gòu)是一種利用構(gòu)件自身的彈性變形來完成運動和力的傳遞與轉(zhuǎn)換的機構(gòu)[1]。圖2為本文所設(shè)計的柔順貼標機構(gòu),主要由橡膠壓輥、彈簧阻尼器、壓力傳感器、導(dǎo)向桿以及各連接件構(gòu)成,該機構(gòu)可以配合機械臂的使用完成貼標動作。其中,壓輥表面包裹彈性橡膠材料,可以增加貼標過程中標簽與行李表面間的接觸面積;依靠彈簧阻尼器的緩沖減震作用可有效降低因力的突變或其他因素帶來的外力的干擾,為機構(gòu)提供柔性,避免壓壞行李;壓力傳感器用來實時檢測行李表面的接觸力,配合主動柔順控制實現(xiàn)貼標力的跟蹤。
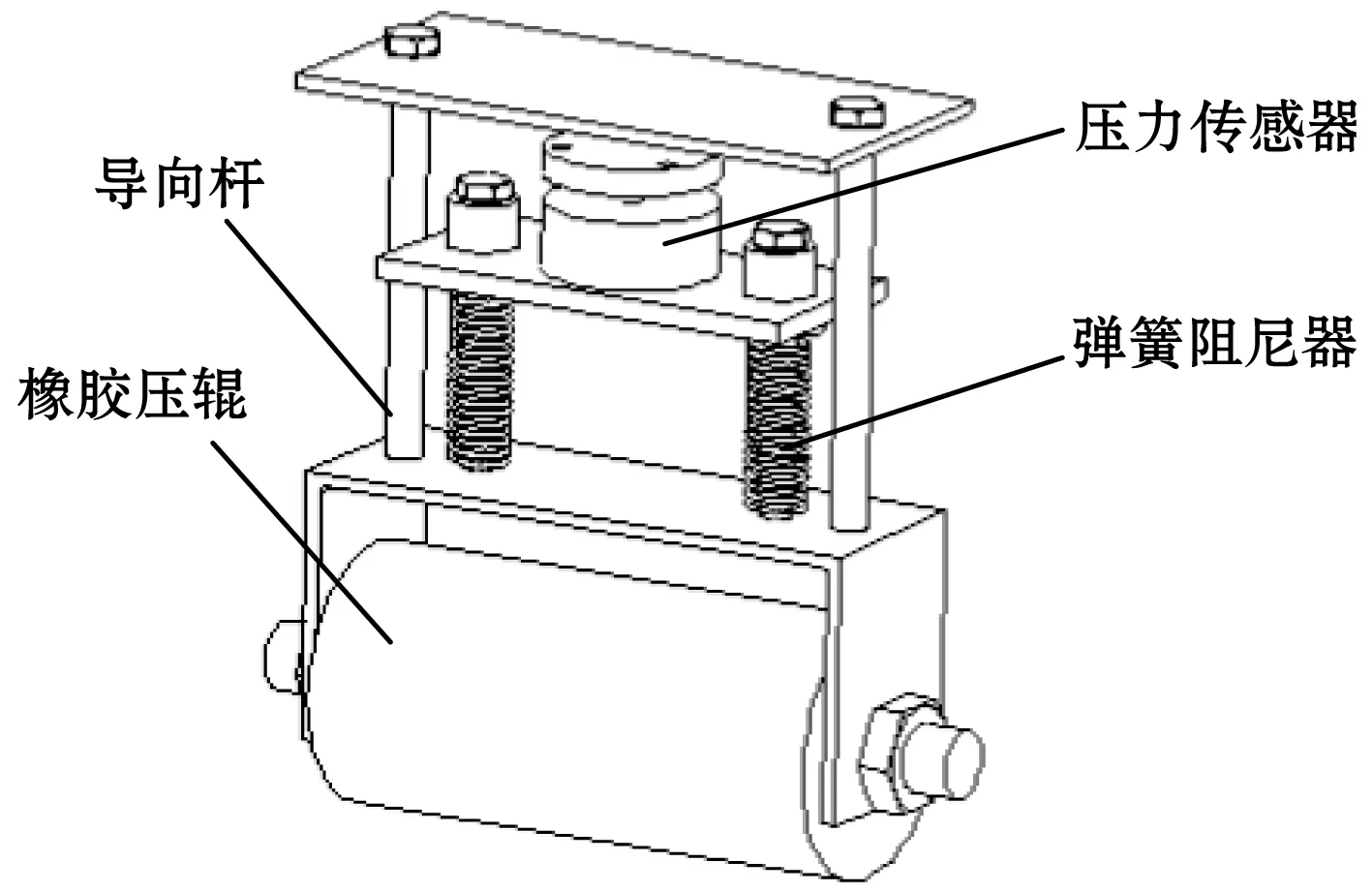
圖2 柔順貼標機構(gòu)
1.2 阻抗控制模型
建立如圖3所示柔順貼標機構(gòu)與行李表面接觸的阻抗模型圖。其中,柔順貼標機構(gòu)建模為二階“質(zhì)量-彈簧-阻尼”系統(tǒng),環(huán)境建模為一階彈簧系統(tǒng)[3]。
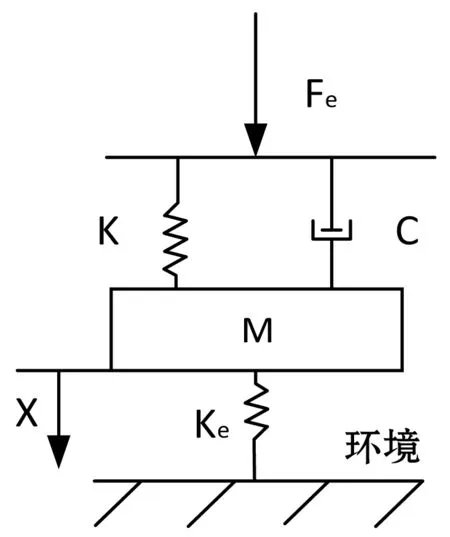
圖3 貼標機構(gòu)阻抗控制模型
在傳統(tǒng)的阻抗控制中引入期望力,得到貼標機構(gòu)與行李表面接觸的二階阻抗控制關(guān)系式如下:
Fe=Ke(X-Xe)
(2)
式中:Fe為與行李箱接觸產(chǎn)生的作用力,可由力傳感器精確測得,F(xiàn)d為系統(tǒng)預(yù)設(shè)的貼標控制力,一般為常值,M、C、K分別為阻抗控制器的目標慣性矩陣、目標阻尼矩陣與目標剛度矩陣。E=Xr-X為阻抗系統(tǒng)的位置偏差,X為給定的期望位置,X為機器人末端運動的實際位置。Ke為環(huán)境的剛度系數(shù),Xe為行李的實際位置。
令ΔF=Fe-Fd作為阻抗控制系統(tǒng)的輸入,輸出為位置偏差E,則系統(tǒng)的傳遞函數(shù)為:
K(s)=1/(Ms2+Cs+K)
(3)
根據(jù)上述假設(shè),力跟蹤誤差ΔF可表示為:
ΔF=Fe-Fd=Ke(X-Xe)-Fd=
Ke(Xr-K(s)ΔF)-KeXe-Fd
(4)
將式(3)代入式(4)得:
若穩(wěn)態(tài)誤差為零,即ΔFss=0,則可推出期望位置滿足以下方程:
由上式可知,要想達到良好的力跟蹤效果,期望位置Xr就必須滿足式(7)。然而,由于旅客行李的多樣性,貼標前無法獲取到準確的環(huán)境位置與剛度信息,故單純的阻抗控制無法實現(xiàn)在環(huán)境參數(shù)不確定的條件下對力的跟蹤。
1.3 自適應(yīng)阻抗控制算法
由于無法獲得準確的環(huán)境信息,則期望位置Xr無法精確計算,本文用初始的環(huán)境位置Xe代替未知的Xr,代入式(1),可得在單一維度上新的阻抗方程為:
本文研究貼標機構(gòu)與行李表面發(fā)生接觸后的情況,由式(8)求解微分方程得,當接觸力達到Fe=Fd的穩(wěn)定狀態(tài)時,為使機械臂滿足理想穩(wěn)定,則K(Xe-X)=0,又Xe-X≠0,故力控方向上的剛度系數(shù)應(yīng)滿足K=0。此時,阻抗控制方程可寫成:

為保證在存在環(huán)境位置估計誤差的情況下力跟蹤的穩(wěn)定性,在式(10)增加自適應(yīng)調(diào)整項Ω(t),從而抵消環(huán)境誤差的影響[5],則自適應(yīng)阻抗控制方程為:
自適應(yīng)調(diào)整項的表達式為:
式中:λ為控制器的采樣周期,η為自適應(yīng)更新率,且η必須滿足:
2 基于神經(jīng)網(wǎng)絡(luò)的系統(tǒng)參數(shù)辨識
機器人動力學系統(tǒng)為多耦合和非線性的復(fù)雜控制系統(tǒng)[6-7],在無法建立精確的動力學模型的情況下,自適應(yīng)阻抗控制難以得到較好的應(yīng)用。徑向基函數(shù)(Radial Basis Function,RBF)神經(jīng)網(wǎng)絡(luò)具有良好的泛化能力,它可以在一個緊湊集和任意精度下,逼近任何的非線性函數(shù)[8]。因此,本文利用RBF神經(jīng)網(wǎng)絡(luò)補償系統(tǒng)動力學模型中的不確定項,從而提高機器人控制系統(tǒng)的魯棒性。
n自由度機械手的動力學方程為[9]:


式中:f為估計模型與實際動力學模型的誤差項,由RBF神經(jīng)網(wǎng)絡(luò)逼近。
定義角度跟蹤誤差為:
σ=qd(t)-q(t)
(16)
定義誤差跟蹤函數(shù)為:

式中:Λ=ΛT>0。
由系統(tǒng)模型可知,神經(jīng)網(wǎng)絡(luò)的輸入為角度誤差和角速度誤差,設(shè)計控制律為:

本文設(shè)計的RBF神經(jīng)網(wǎng)絡(luò)分為三層,包括輸入層、輸出層和隱含層,其中隱含層的徑向基函數(shù)采用具有局部響應(yīng)特性的高斯徑向基函數(shù)[10]。假設(shè)RBF神經(jīng)網(wǎng)絡(luò)從輸入層到輸出層的節(jié)點數(shù)量分別為n、m、p,隱含層第j個節(jié)點的輸出為:
式中:j=1,2,…,m,s為n維輸入向量,cj為網(wǎng)絡(luò)中隱含層第j個節(jié)點的中心矢量,bj為第j個節(jié)點高斯函數(shù)的寬度。
理想RBF神經(jīng)網(wǎng)絡(luò)的輸出為:
y=Wφ(x)
(20)
式中:φ=[h1,h2,…,hn]。
為實現(xiàn)RBF神經(jīng)網(wǎng)絡(luò)的非線性逼近能力,通過權(quán)值調(diào)整控制補償不確定部分,設(shè)計自適應(yīng)律為:
3 實驗驗證

式中:J為雅可比矩陣。
建立基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)阻抗控制系統(tǒng)的原理框圖如圖4所示。

圖4 神經(jīng)網(wǎng)絡(luò)自適應(yīng)阻抗控制算法原理圖
選擇關(guān)節(jié)長度為l1=l2=1 m,關(guān)節(jié)質(zhì)量為m1=m2=1 kg,c按神經(jīng)網(wǎng)絡(luò)輸入值的范圍取:



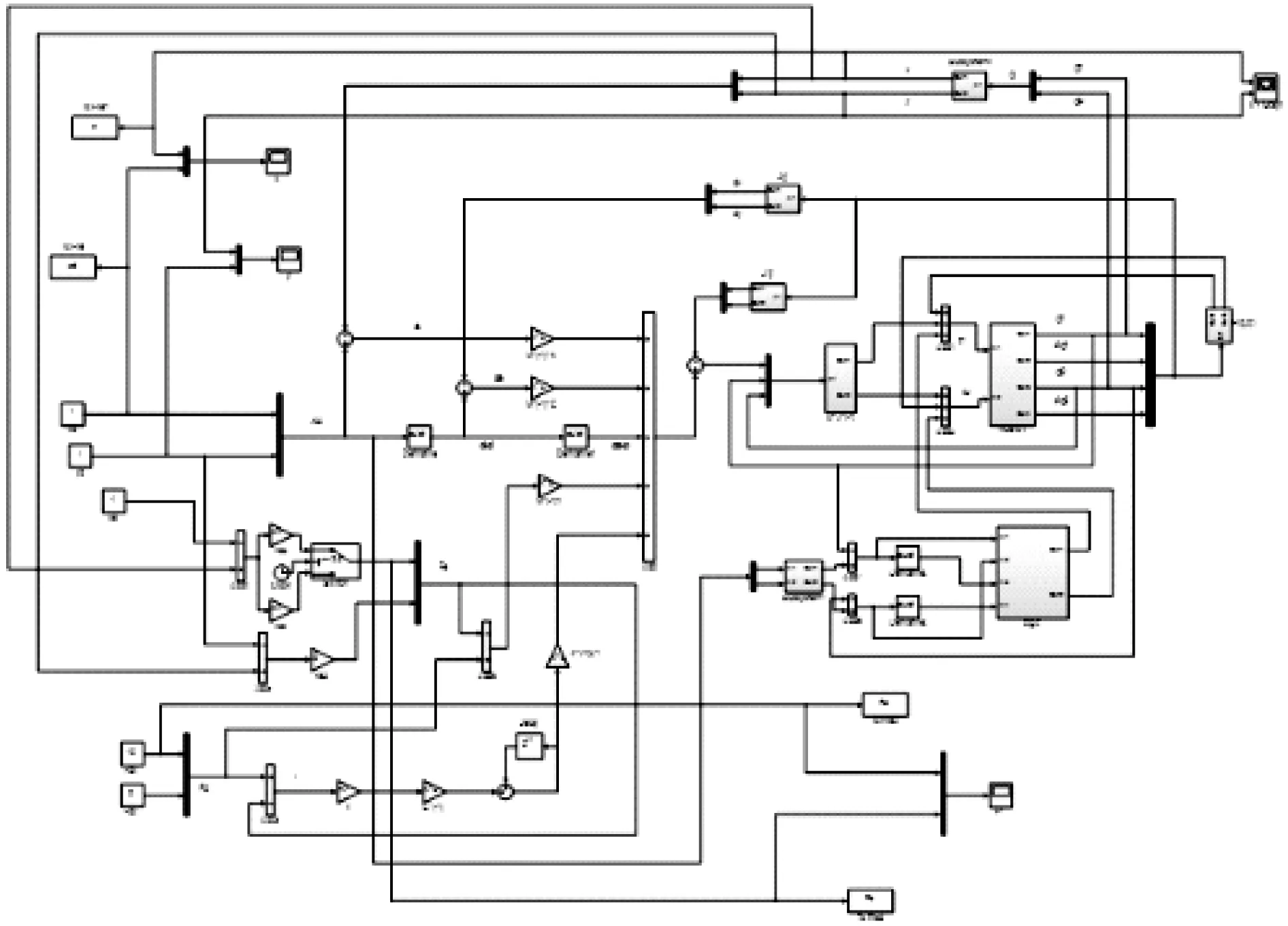
圖5 MATLAB仿真實驗平臺
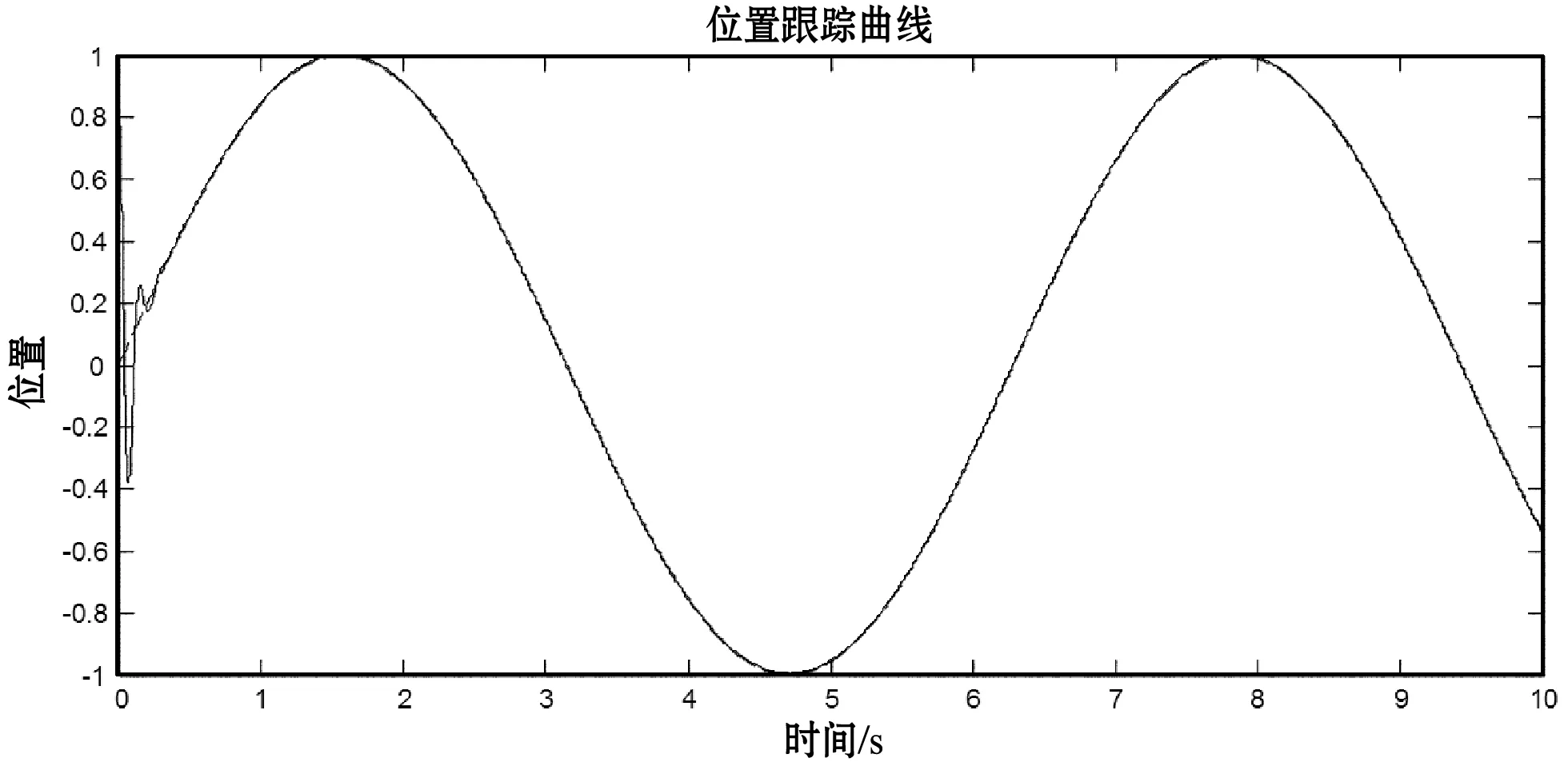
圖6 x軸位置跟蹤曲線
考慮自動貼標裝置與行李接觸為恒壓力接觸,故取輸入的期望力為:x方向上10 N,y方向上0 N,定義行李表面為平整的平面,對其進行仿真驗證驗證,結(jié)果如圖7-圖8所示。其中,虛線為期望的力和位置信號,由仿真結(jié)果可知,在環(huán)境參數(shù)未知的情況下,經(jīng)過充分的迭代學習后,該算法輸出的力和位置信號誤差在期望的誤差范圍內(nèi),較好地滿足位置和力跟蹤的要求。

圖7 力跟蹤曲線

圖8 位置跟蹤曲線
由于旅客行李的多樣性,將其抽象為彈性體后,表現(xiàn)為其剛度系數(shù)的不同。由于行李的剛度系數(shù)無法提前獲知,假定初始的環(huán)境剛度系數(shù)為ke=2 000,在t=2.5 s時,環(huán)境剛度發(fā)生突變,ke=500,分別驗證其在阻抗控制與本文所提出的自適應(yīng)控制算法下對期望力的跟蹤情況,驗證結(jié)果如圖9-圖10所示。

圖9 阻抗控制變剛度力跟蹤曲線

圖10 自適應(yīng)阻抗控制變剛度力跟蹤曲線
圖9為在變剛度環(huán)境下阻抗控制對力信號的跟蹤效果,圖10為自適應(yīng)阻抗控制對力的跟蹤效果。仿真結(jié)果表明:單純的阻抗控制無法滿足變剛度情況下對期望力的跟蹤,而基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)阻抗控制在經(jīng)過自適應(yīng)調(diào)整后可以很好地跟蹤上期望力。
實驗樣機如圖11所示,供標裝置將標簽送至指定貼標區(qū)域后,柔性貼標裝置將標簽壓貼于行李表面,由壓力傳感器檢測貼標裝置與行李之間的初始接觸力,反饋于控制系統(tǒng),利用基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)阻抗控制算法控制機械臂的升降,使貼標壓力始終維持在允許范圍內(nèi)。實際接觸力的控制效果受機構(gòu)間的摩擦力、壓力傳感器的測量誤差等因素的影響,與仿真結(jié)果存在一定差距。經(jīng)驗證,該方法可以避免損壞行李并能夠滿足良好的貼標效果。
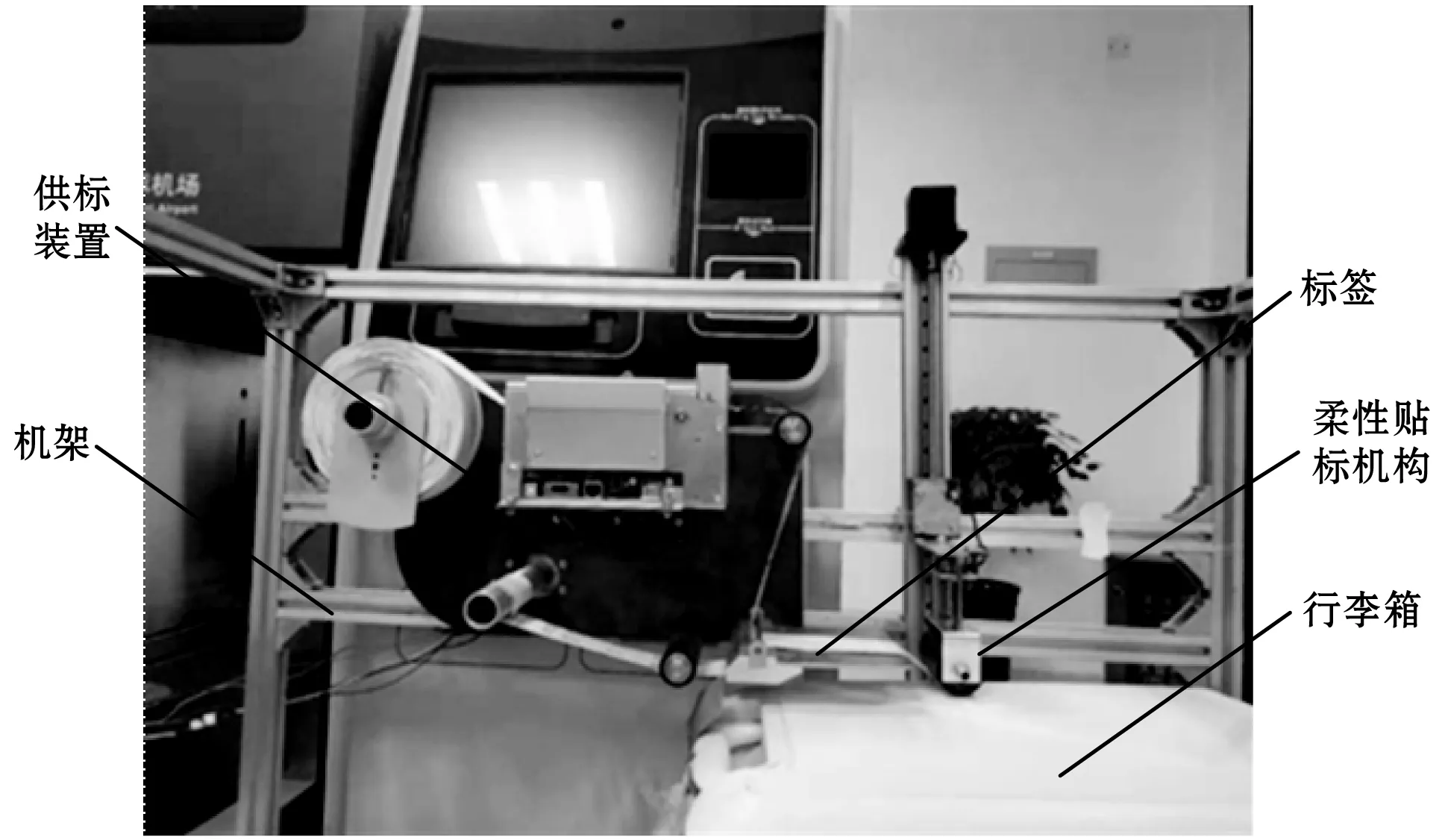
圖11 實驗樣機
4 結(jié) 語
本文針對機器人貼標作業(yè)時接觸力的控制問題,在環(huán)境參數(shù)未知、機器人動力學模型不精確的情況下,研究了一種主被動柔順控制貼標方法。首先設(shè)計了一種被動柔順貼標機構(gòu),利用機構(gòu)自身的柔性吸收由于外力干擾等因素帶來的慣性力,確保行李的安全;其次提出了一種基于RBF神經(jīng)網(wǎng)絡(luò)的自適應(yīng)阻抗控制算法,該算法通過在線實時更新阻抗控制參數(shù),實現(xiàn)在環(huán)境參數(shù)未知的情況下對期望力跟蹤的目的。在MATLAB中對本文所提算法與傳統(tǒng)阻抗控制算法進行對比實驗,結(jié)果表明,該方案在環(huán)境參數(shù)未知的工況下達到了較理想的控制效果。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38