架空地線巡檢機器人多電機同步控制策略
2019-08-13 04:26:30沈百強樂全明鄭月忠倪宏宇林祖榮
浙江電力 2019年7期
沈百強,樂全明,鄭月忠,倪宏宇,林祖榮,陳 斌
(國網浙江省電力有限公司紹興供電公司,浙江 紹興 312000)
0 引言
架空地線(以下簡稱“地線”)巡檢機器人是在惡劣環境下代替人去進行巡檢作業的工具,是電力系統線路巡檢的一種實用且不可缺少的方式。但由于架空線路的復雜性及地形的影響,這些不確定的干擾對于以運動控制為核心的機器人運動體而言,會影響多個行進電機間的同步,嚴重時可能導致電機堵轉從而發生故障,多電機的協調控制一直都是一個非常重要的研究課題。 在實際的應用中,多電機的同步性會因為負載的擾動、外界的干擾等影響而惡化,提高多電機系統的同步性能將直接影響系統的可靠性和控制精度,所以對于多電機的同步控制的研究非常具有實用價值[1]。 目前,電力系統中地線巡檢機器人的運行就需要對于多電機進行同步控制才能夠滿足機器人的運動需求。 當巡線機器人在運行的時候,由于受到外界因素的干擾,巡線機器人3 臺電機的運行速度會發生變化,從而使得機器人的運行可能出現打滑或線路嚴重磨損的問題。 本文針對巡線機器人在運行時電機速度不匹配的問題,提出了一種基于神經網絡的多電機同步控制策略。
多電機同步控制通常有耦合控制和非耦合控制這2 種控制結構[2],非耦合控制的控制精度低,彼此之間沒有耦合,受到擾動時存在較大的同步誤差[3],很難滿足非線性系統的控制要求;而耦合控制能夠更好地改善電機控制的同步性能[4],偏差耦合控制在3 臺以上的同步電機控制中有著廣泛的應用[5],能夠有效降低外部擾動和參數變化所帶來的影響[6]。 多電機控制系統是一個非線性的系統,存在參數時變等特點,傳統的PID 控制策略結構簡單,易于調節,在電機調速中有著廣泛的應用[7]。 但這種方法依賴于精確的模型,存在一定的局限性[8]。 模糊PID 控制方法雖然不需要建立具體的模型,但是其中參數的設計只能依靠經驗進行選擇,很難自動設計和調整[9]。 而神經網路PID 控制與模糊PID 控制相同,無需具體的被控對象模型,同時具有很好的自學習以及自適應的能力,能夠很好地滿足多電機控制的需求[10]。
本文基于地線巡檢機器人的多電機控制,提出一種將RBF(徑向基函數)神經網絡和偏差耦合相結合的多電機控制策略,利用神經網絡具有良好的自適應、自學習能力和不依賴于被控對象精確模型的特點。 通過MATLAB 仿真實驗,并將這種控制方法運用于地線巡檢機器人當中,結果表明,電機的轉速跟蹤性能良好,控制精度高,對于外界擾動的響應速度快、穩定性好,能夠較好地滿足地線巡檢機器人多電機同步控制的需求。
1 多電機同步控制整體結構
本文的地線巡檢機器人如圖1 所示。 其多電機控制主要使用偏差耦合控制,控制器采用RBF-PID 控制器。 電機控制系統總體控制框圖如圖2 所示。 圖中w1(t),w2(t),w3(t)表示的是電機的實際轉速;e1(t),e2(t),e3(t)分別表示電機1,電機2,電機3 的跟蹤誤差(即電機給定轉速與實際轉速的差值);δ12(t),δ13(t),δ21(t),δ23(t),δ31(t),δ32(t)則表示的是電機的同步誤差(即不同的電機之間實際轉速的差值)。 整體的控制過程如下,給定電機一定的轉速,電機給定的轉速與實際的轉速之偏差,作為電機的速度控制信號。再將電機的實際轉速與其他電機的實際轉速之偏差,作為電機的速度補償信號[11]。 將得到的信號,分別給到RBF-PID 控制器和速度補償器,補償電機的速度,控制電機之間的同步運行,達到多電機同步控制的目的。

圖1 地線巡檢機器人

圖2 RBF 控制結構
相比其他的控制方式,如傳統的PID 控制、模糊PID 控制等,傳統的PID 控制對于非線性系統控制很難建立一個準確的模型;雖然模糊PID控制也不依賴于控制對象的實際模型[12],但是對于模糊PID 控制器搭建的經驗要求較高,存在一定的局限性。 而神經網絡PID 控制方法,易于理解、操作簡單,相比于其他控制方法,更加具有實用性[13]。
2 偏差耦合控制原理
偏差耦合控制利用不同電機轉動慣量之間的關系,在速度控制中,添加電機的速度作為補償信號,根據電機反饋的信號,分配不同的補償速度,從而達到速度補償的目的[14]。 在系統運行時,控制器將不同電機之間的速度進行比較,通過補償算法,得到每個電機的轉速補償信號[15]。 把不同電機的轉速進行補償,最終消除電機和相鄰的電機轉速之間的偏差[16]。
對于一個具有n 臺電機的多電機控制系統,可以定義第n 臺電機的跟蹤誤差為:

為了保證每臺電機能夠同步運行,那么跟蹤誤差就需要滿足:

同理,再定義第n 臺電機與系統中其他電機的同步誤差為:

式中:w1(t),w2(t),…,wn(t)分別為第1 臺到第n 臺電機的實際轉速。
根據跟蹤誤差和同步誤差的定義,可以知道多電機同步控制的目的就是設計一個控制器來控制轉矩,使得跟蹤誤差e(n)t和同步誤差δnn-1(t)收斂趨近于零。
對于3 臺電機的多電機控制系統來說,對于電機1,滿足跟蹤誤差和同步誤差收斂,就要滿足:

同理,電機2,3 滿足同樣的關系式,所以當進行3 臺電機的同步控制時,總共需要3 個跟蹤誤差控制器和6 個同步誤差控制器進行電機的同步控制。因此,系統中各個電機的速度控制量為:

式中:iqn(t)為每臺電機的跟蹤誤差控制器的輸出;iqi1(t),…,iqin(t)為同步誤差控制器的輸出。
由此,偏差耦合的多電機控制方法可以歸納為以下3 步:
(1)定義控制變量e(n)t 和δnn-1(t),n=1,2,…,n,作為電機的同步誤差和跟蹤誤差。
(2)設計RBF-PID 控制器的輸出為電機自身調節輸出和補償信號輸出。
(3)建立系統的整體控制模型。
3 RBF-PID 控制器設計
3.1 RBF 神經網絡觀測器設計
RBF 神經網絡是一種前饋網絡,相較于BP神經網絡,RBF 神經網絡具有最佳逼近的特點,對于一個連續非線性函數,能夠無限逼近[17]。 RBF神經網絡總共有3 層,分別為輸入層、隱含層和輸出層,隱含層用高斯函數作為激勵函數[18]。 輸入層到隱含層是非線性的映射,隱含層到輸出層是線性的映射[19],其結構如圖3 所示。

圖3 RBF 神經網絡結構
本文采用的控制系統由RBF 神經網絡觀測器和PID 控制器構成。 其中RBF 神經網絡觀測器有跟蹤誤差控制器與同步誤差控制器2 種,具有雙輸入單輸出的結構。 跟蹤誤差控制器的輸入為轉速誤差以及實際轉速,輸出為q 軸調節電流。 同步誤差控制器的輸入為不同電機的實際轉速差值和其微分值,輸出為q 軸補償電流。
在RBF 神經網絡結構中網絡的輸入向量X=[x1,x2,…,xn]。 設RBF 網絡的徑向基向量為H=[h1,h2,…,hj,…,hm]T,其中hj為高斯基函數:

網絡的正數輸出為:

辨識的性能指標:

式中:Cj為第j 個結點的中心矢量;bj為網絡的基寬向量;w 為網絡的權向量[20]。
根據梯度下降法,得到節點中心、輸出權值和節點基寬的迭代算法:
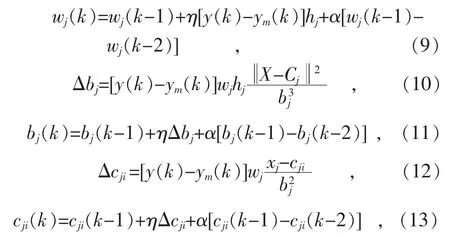
式中:η 為學習速率;α為動量因子,得到被控對象的雅可比信息的辨識算法:

3.2 基于RBF 神經網絡的PID 設計
傳統的PID 控制器通過選取一組最優參數,來達到最佳的控制效果。 但是由于多電機控制系統中,對象具有非線性特性,所以理想控制器也應該為非線性函數[21]。 因此,結合神經網絡,設計了一種RBF-PID 型神經網絡控制器,實現對控制器參數的在線調整,更好地同步控制多電機系統,RBF-PID 控制器的結構如圖4 所示。 圖中Δkp,ΔkI,ΔkD分別表示的是kp,kI,kD3 個PID參數的調整量。 調整量需要通過迭代法不斷地進行調整,為了快速獲取調整量,選用梯度下降法進行迭代。 而梯度下降法的原理是通過求解當前位置梯度,沿著梯度負方向移動,到達新的位置,然后重復著這一過程,從而使目標函數沿著函數值下降最快的方向更新參數。 這種方法能夠達到快速獲取調整量的目的。
增量式PID 控制算法的控制誤差為:


圖4 RBF-PID 控制器結構
根據增量式PID 控制器輸入輸出的定義得到增量式PID 的輸出為:

為得到神經網絡PID 控制器參數的更新規律,選取參數整定性能指標函數:

最后采用梯度下降法對類PID 神經網絡參數進行調整,調整規則如式(18)和式(19)所示。
PID 參數調整:

權值參數調整:

4 試驗分析
為了驗證該控制策略的控制性能,本文采用MATLAB 中的Simulink 仿真平臺進行仿真試驗。在Simulink 中建立3 臺電機的控制模型,每一臺電機的獨立控制部分的電流環使用傳統的PID 控制,電機的速度環和速度補償部分使用RBF-PID控制器進行控制,RBF-PID 模塊使用S 函數進行編寫。 試驗使用的電機具體參數如表1 所示。 而RBF-PID 控制器中PID 的參數學習率xite=-0.2,權值的參數學習率xitev=-1,學習參數η=1.5,動量因子?=0.5。
試驗時,結合地線巡檢機器人的實際運行情況,地線巡檢機器人正常工作下的運行速度為0.2 m/s(通過電子齒輪之間的轉換,即給定電機初始轉速為300 rad/s),運行一段時間后,巡檢機器人受到外界干擾(即在時間t=0.1 s 時給電機一個擾動),轉速下降后又再次回到給定值,接著改變地線巡檢機器人行進電機的給定轉速為0.167 m/s(即旋轉電機轉速為250 rad/s)。 在Simulink 下進行這一過程的仿真,得到系統轉速,同步誤差以及跟蹤誤差曲線。

表1 電機參數
試驗結果如圖5—7 所示。

圖5 電機的轉速及局部放大曲線
根據圖5—圖7 分別得出結論,由圖5 可知,3 臺電機在啟動的過程當中,動態響應的速度很快,能夠很快地達到給定轉速。 當其中的1 臺電機給定負載擾動后,其他2 臺電機的轉速都能夠進行跟隨,使得電機的轉速很快能夠回到穩定轉速。 由圖6,圖7 可知電機之間具有較小的跟蹤誤差,具有良好的同步性能和穩定性能。

圖6 電機的跟蹤誤差及局部放大曲線

圖7 電機的同步誤差及局部放大曲線
多電機同步控制算法已應用于浙江電網,可實現高壓架空地線單掛點、雙掛點及耐張塔自主越障,多電機同步運行控制策略運行效果良好,滿足項目設計需求。
5 結語
本文針對地線巡檢機器人在實際運行中,存在線路復雜、地形影響以及輔助器件影響等擾動,以及其他外界因素干擾導致的各個電機之間速度不匹配,將神經網絡與PID 控制相結合,設計了一種控制器,該控制器具有神經網絡自學習的特點,不依賴于具體的系統模型,能夠自動地對PID 控制器中的參數進行調整,各個電機之間通過偏差耦合的控制結構進行設計,最后經由Simulink 仿真平臺進行仿真試驗。 由電機的轉速、跟蹤誤差、同步誤差等分析可知,在本文的多電機同步控制策略下,電機的轉速跟蹤性能好,控制精度高,對于外界擾動的響應速度快、穩定性好,能夠較好地滿足地線巡檢機器人多電機同步控制的需求。