改進ICP算法在無人機煤堆體積測量的應用研究
2019-08-09 02:14:14楊耀權江鵬宇
自動化與儀表 2019年7期
彭 蹦,楊耀權,江鵬宇
(華北電力大學 控制與計算機工程學院,保定 071003)
現代火力發電廠中,煤場的儲煤量與發電煤耗量息息相關,目前最主要的煤場儲量獲取方式為體積密度折算法[1]。因此,煤場煤堆體積的盤算往往需保持在厘米級精度,以精確核算電廠發電效益。
隨著三維測量技術的高速發展,許多專家學者在不同領域進行了相關的應用和研究。高精度三維測量取決于更高比例尺(1∶2000或1∶1000)的數字高程模型 DEM(digital elevation model[2]。其中,無人機傾斜攝影和激光測點掃描作為2種三維模型測量新技術,在煤堆體積測繪過程中已被人們廣泛使用。
無人機傾斜攝影和激光掃描技術針對不同場景的三維測量已日趨成熟,前者可實現多角度影像采集,保證三維模型精度,提升建模測量效率,但數據冗長、自主匹配速度慢、空洞修補具有主觀性;后者使用簡單,操作安全,可精細化三維模型[3],但后期處理軟件效率低,人為誤差影響大。綜合分析無人機傾斜攝影和地面三維激光測點掃描技術各自的優缺點,在此研究了傾斜攝影與全站儀三維掃描技術在煤堆體積測量中的融合應用,取長補短,研發適用于電廠煤堆工程測量的新技術,最大限度提升煤堆體積測量的效率和精度。
1 基于點云數據的煤堆三維測量
1.1 無人機傾斜攝影技術
無人機傾斜攝影技術采用搭載高清攝影頭的小型飛行器,在低空環境下對煤場煤堆進行固定云臺角度拍攝,得到一組具備一定航向重疊度和旁向重疊度的煤堆圖像,隨后利用軟件處理獲取實景三維模型成果,完成煤堆業內數據分析。該技術廣泛應用于軍工、測繪、數字城市等領域。
基于無人機傾斜攝影技術的煤堆體積測量流程如圖1所示。
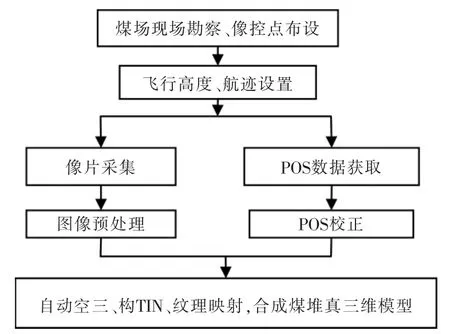
圖1 基于傾斜攝影的無人機煤堆體積測量技術Fig.1 Coal pile volume measurement technology based on tilt photography of drone
無人機傾斜攝影測量技術是目前電廠煤堆體積測量的一種新型技術,它能夠多角度、大面積采集煤場影像數據,保證煤堆測量精度,提升測量效率,但基于無人機傾斜攝影獲取煤場煤堆三維數據存在一些尚未克服的技術性問題,如:影像數據自主匹配速度慢、地形地貌復雜情況下無GPS信號時,無人機不可控等。
1.2 三維測點掃描技術
三維掃描技術又稱實景復制技術,它利用激光測距的原理,通過漫反射收集被測目標表面的三維幾何、紋理數據等信息[4]。此類技術廣泛應用于歷史文物保護、醫學工業測量等精密程度高的領域。
全站儀三維測點技術的核心為脈沖激光打點測距,通過對激光的發射和接收、延時估算得到脈沖波來回時間間隔,通過式(1)求解出激光發射基站和標靶之間的距離。即:

式中:c為光速;Δt為脈沖波來回時間間隔;Δd為激光發射基站和標靶之間的距離。
利用毫米級精度全站儀采集像控點三維坐標的操作步驟如圖2所示。
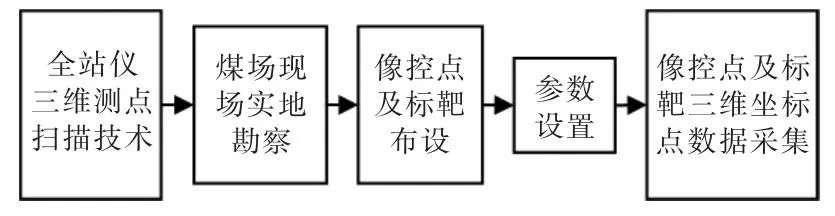
圖2 像控點三維坐標采集流程Fig.2 3D coordinate acquisition process of image control points
為保證煤場每個像控測點所獲三維坐標數據準確可靠,外業數據采集過程中應采用正直掃描以減小掃描方向與被掃煤堆夾角過大帶來的誤差[5]。全站儀掃描基站采用實時動態RTK(real time kinematic)載波相位差分技術,求差解算平面坐標,通過水準測量技術獲得高程數據坐標[6]。
該技術操作簡單,不受GPS信號影響,獲取的三維RTK數據能達到毫米級精度。
1.3 ICP算法及改進
點云配準的最終目的是通過一定的旋轉和平移變換將不同坐標系下的2組或者多組點云數據統一到同一參考坐標系下,獲得被測物體的完整幾何信息。在數據配準算法中,研究者使用最多的也是最為經典的是ICP算法。
在建模過程中,有些物體是完全一樣的,只是空間位置發生變化[7],這就為無人機傾斜攝影和全站儀三維測點技術的ICP算法配準融合提供可行性理論依據。
ICP算法的基本原理是:分別在待匹配的目標點云P和源點云Q中,按照一定的約束條件,找到最近鄰點(pi,qi),然后計算出最優匹配參數R和t,使得誤差函數最小。誤差函數E(R,t)為

式中:n為最鄰近點對的個數;pi為目標點云P中的一點;qi為原點云Q中與pi對應的最近點;R為旋轉矩陣;t為平移向量。
ICP算法能保證源點云和目標點云的精準匹配,但是配準速度較慢。故在此采用基于NDT(normal distributions transform)的ICP點云配準算法[8-9],即在ICP算法配準之前,先通過NDT算法對點云距離及姿態進行粗調整,有效提升配準速度。
在基于NDT的ICP算法背景下,無人機傾斜攝影與全站儀三維測點技術點云融合的基本步驟如下:
步驟1利用無人機傾斜攝影技術獲取目標點云P,并在其中取若干點集pi∈P;
步驟2均勻劃分目標點云P的三維模型空間,形成若干格子,每個格子最少包含6個點;
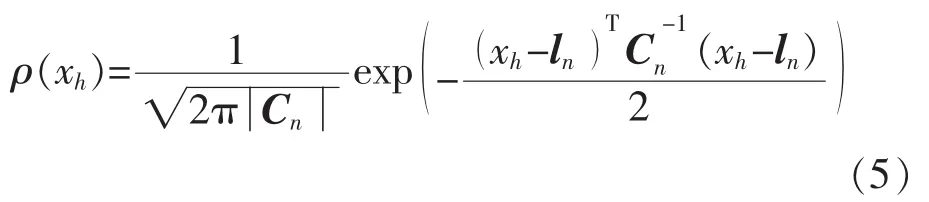
步驟3計算每個格子的中值向量ln和協方差矩陣Cn;
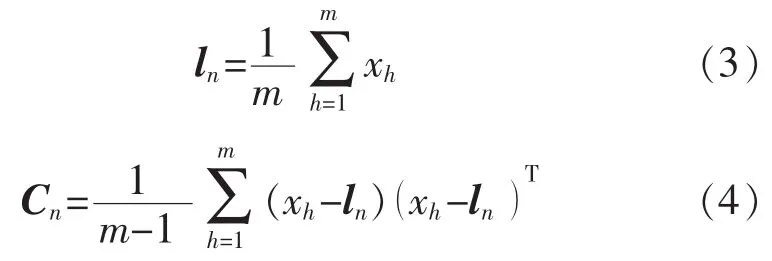
式中:xh為每個格子的點集;m為每個格子中點的個數。
步驟4利用格子中的每一個數據點xh的概率密度函數ρ(xh),通過正態分布變換得到正態分布模型N(ln,Cn),形成分段光滑區間表示形式:
步驟5在目標點云P中,將待配準點集pi每一個點按照最優轉移矩陣G進行變換,完成目標點云距離及姿態粗調整。其中,最優轉移矩陣由最優值分數值G(p)計算得到:
步驟6利用全站儀三維掃描測點技術獲取像控點三維坐標,像控點集構建源點云Q;
步驟7找出源點云Q中對應點集qi∈P,使得‖qi-pi‖為最小值;
步驟8計算R和t,使得誤差函數最小;
步驟9利用步驟8求得的R和t,對pi使用四元數算法進行旋轉和平移變換,得到新的對應點云數集為

步驟10計算pi′與對應點集qi的平均歐式距離:

步驟11若d小于某一給定的閾值或者大于預設的最大迭代次數,則停止迭代運算;否則返回步驟7,直至滿足收斂條件為止。
1.4 技術融合應用
針對煤場測區特點,試驗采用無人機傾斜攝影技術大范圍采集煤場點云數據,合理布設像控點位置,然后將全站儀像控測點坐標融入無人機傾斜攝影點云模型中,根據新模型三維數據完成對煤場煤堆的體積測量。其中,ICP技術數據融合的流程如圖3所示。
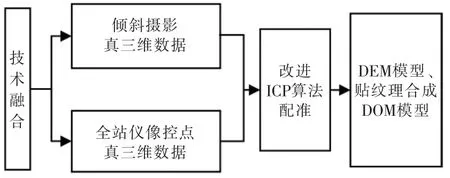
圖3 ICP算法點云融合流程Fig.3 ICP algorithm point cloud fusion process
2 煤堆建模測量應用
2.1 測區概況
煤場試驗區位于貴州省貴陽市某電廠3號煤場,長約160 m,寬約76 m,測區呈長方形,其核心區域均由煤堆構成。周邊區域均為擋煤圍墻,還包括有路燈、樓房、鏟煤車等地物。試驗現場如圖4所示。
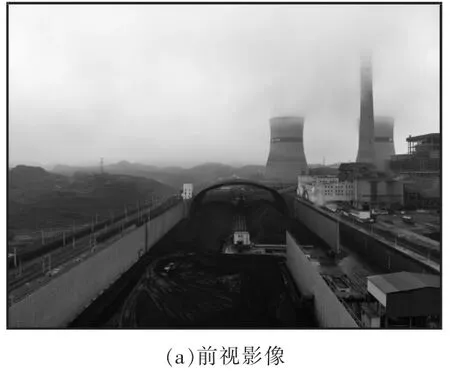
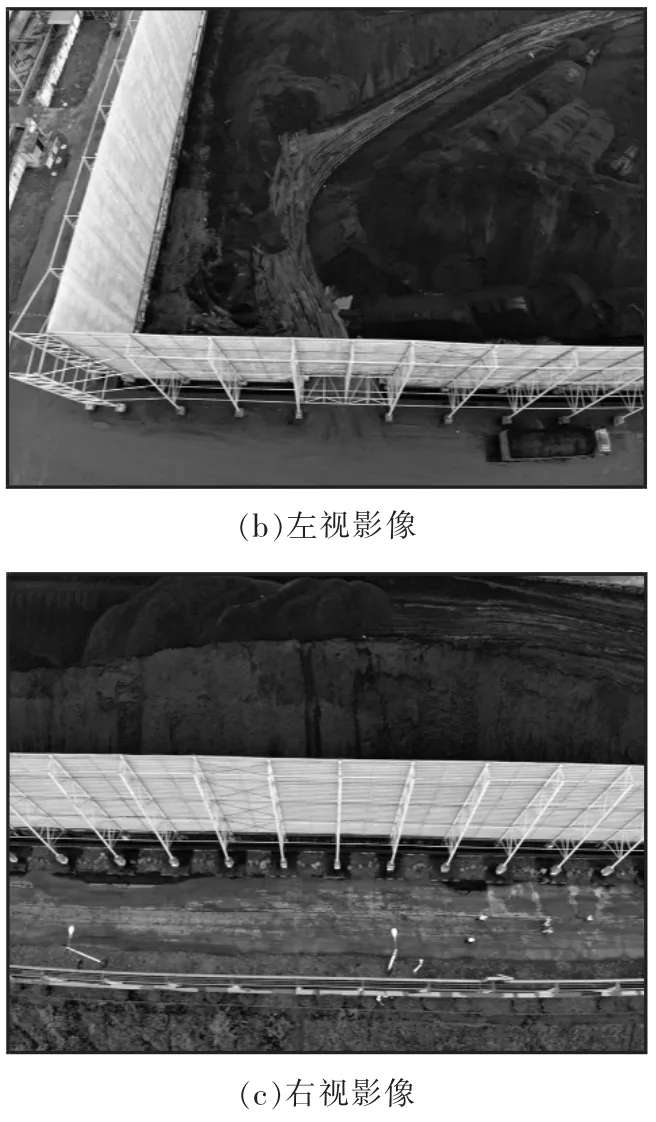
圖4 不同角度下的測區工程現場Fig.4 Survey site at different angles
2.2 數據獲取及分析處理
(1)測量條件與數據獲取
試驗采用DJI大疆精靈Phantom 4 RTK無人機飛行器,建模精度滿足厘米級要求。該無人機飛行器主要技術指標和性能參數見表1。
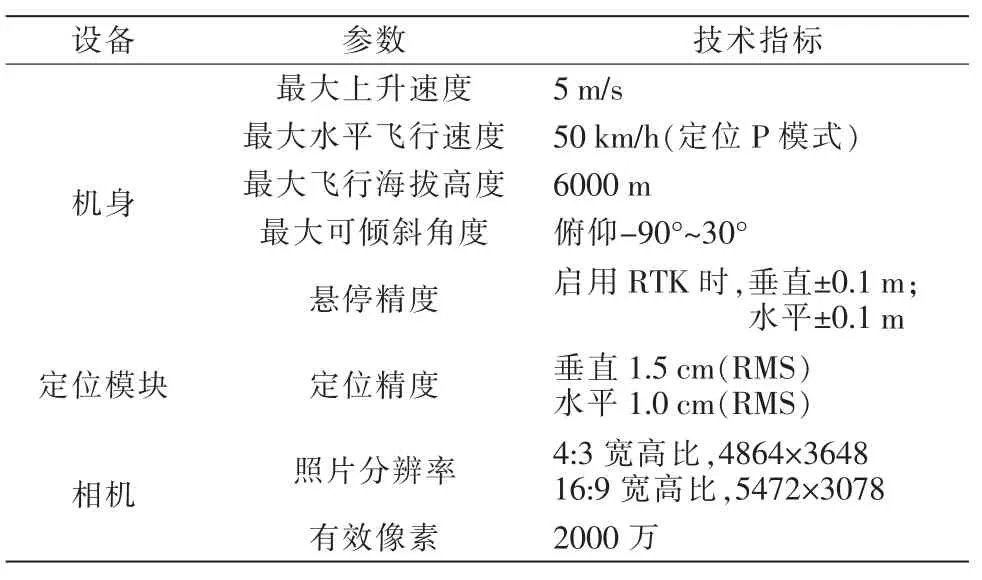
表1 無人機飛行器主要性能參數Tab.1 Main performance parameters of UAV aircraft
設置飛行高度50 m,航線重疊度50%,旁向重疊度45%,云臺角度60°。依據以上參數設置,此次試驗針對3號煤場煤堆區域,飛行時間約25 min,獲取原始煤堆圖像324張。大疆無人機航攝過程自主采集POS數據,獲取影像外方位元素。再將324張煤堆圖像進行有效像片篩選,剔除無煤堆目標影像,最終獲得301張有效像片。
將煤堆圖像進行畸變校正,使用運動模糊算子motion filter,利用維納濾波法復原模糊圖像,完成去抖動化處理[10],處理前后比對結果如圖5所示。
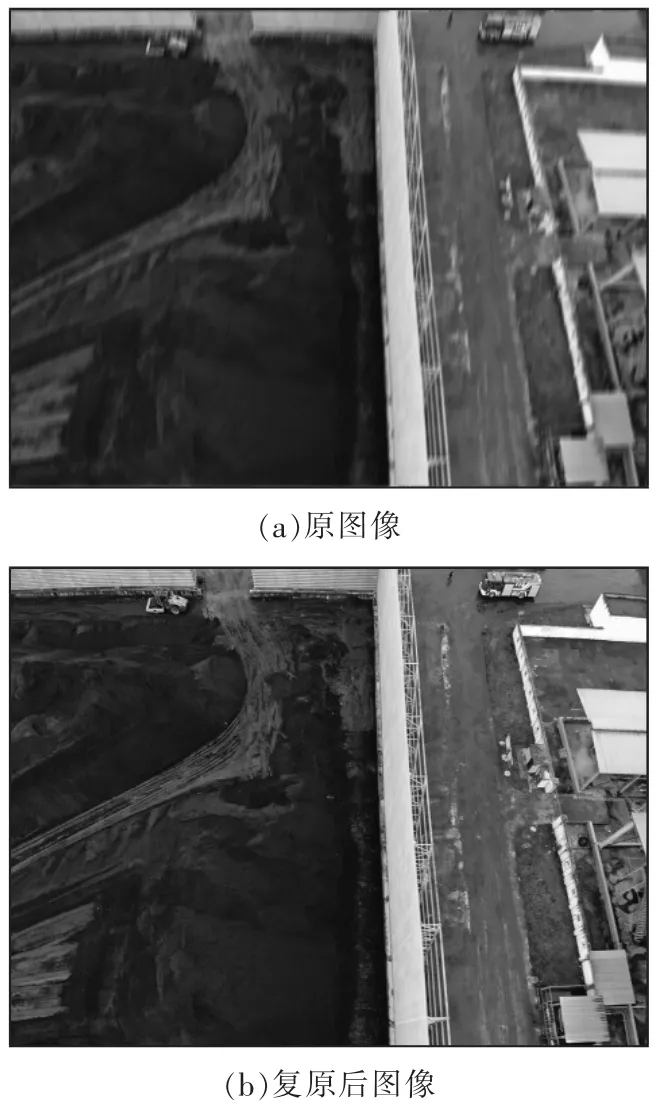
圖5 維納濾波法處理前后的對比Fig.5 Wiener filtering method before and after comparison
(2)掃描試驗
全站儀針對3號煤場煤堆進行像控測點掃描試驗。因考慮到煤場煤堆的特殊情況,為保證一定的精準度,中間凹陷段及煤堆斜坡區域需集中鋪設多個像控點。其中,像控點設定共計14個,采集到的像控點三維坐標數據見表2。試驗過程中,記錄儀自動換算像控點相對三維坐標數據。
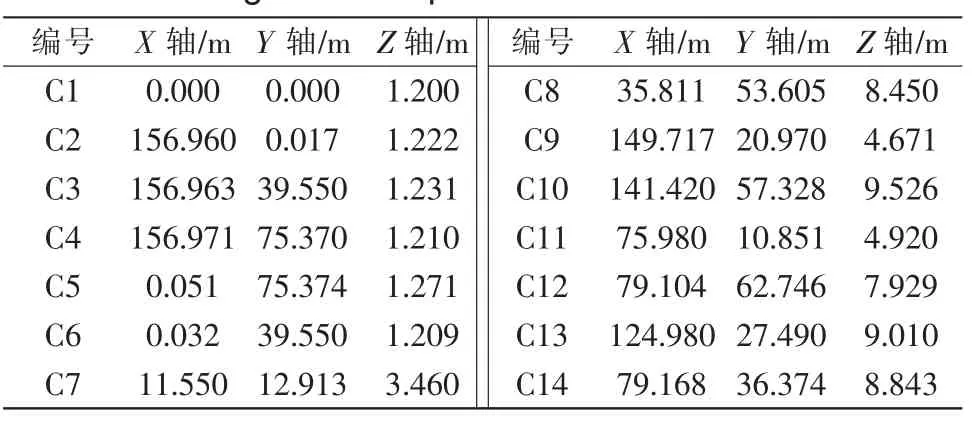
表2 像控點相對三維坐標Tab.2 Image control point relative 3D coordinates
(3)煤堆建模
綜合上述數據,通過無人機傾斜攝影技術得到的煤堆POS數據,使用光束法整體平差煤堆影像區域,空三建立不規則三角網格TIN,形成白模區域后得到煤堆DEM模型[11]。
結合全站儀掃描得到的像控點三維RTK數據,在open CV平臺上采用基于NDT的改進ICP算法,將全站儀像控點三維坐標數據融入無人機傾斜攝影煤堆DEM模型中,提升配比準確度,圖像無效化程度得以抑制,最終得到更加精細的煤堆DEM合成模型,并以USGS格式保存。
ICP算法技術融合前后的煤堆點云密度分布如圖6所示。
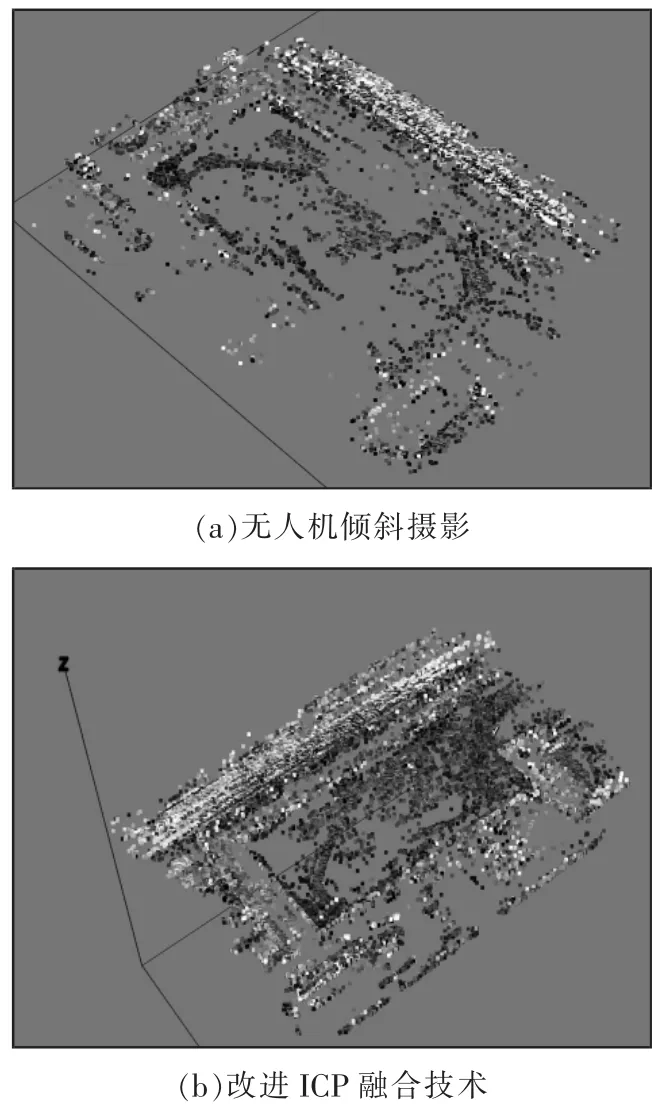
圖6 煤堆點云數據密度Fig.6 Coal pile point cloud data density
改進ICP算法技術融合后的點云密度顯著增加,煤堆RTK三維數據得到的模型真實性效果較好,白模區域無明顯空洞,如圖7所示。
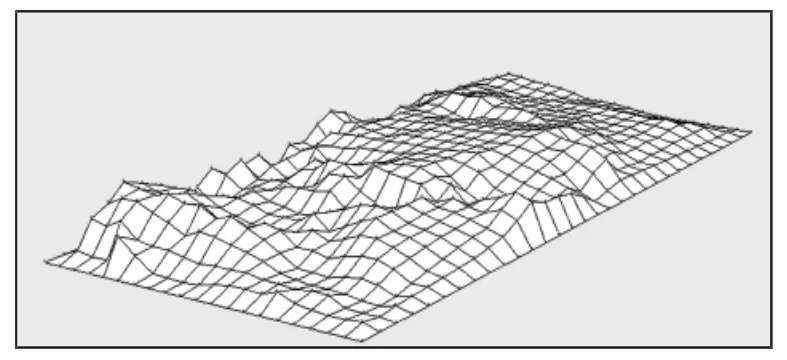
圖7 煤堆白模區域效果Fig.7 Coal pile white mode area effect
利用Pix4D mapper軟件紋理貼圖,獲取煤場區域煤堆數字正射影像圖DOM(digital orthophoto map),最終形成真實煤堆數字地表模型DSM(digital surface model),建模效果對比如圖8所示。
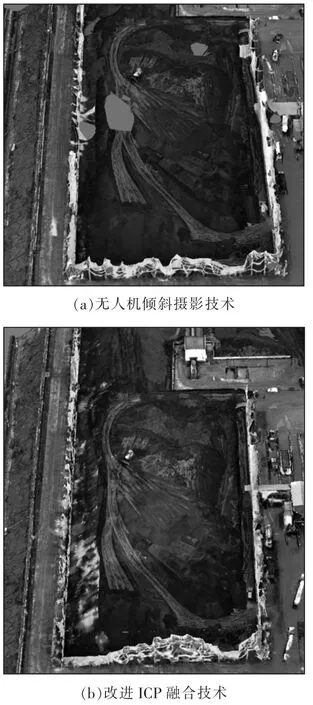
圖8 煤堆三維重建模型Fig.8 3D reconstruction model of coal pile
可知,傳統無人機傾斜攝影技術下煤堆數據配比錯誤致使圖像無效化嚴重,引起模型空洞多,建模效果不理想。而通過ICP算法合成的煤堆DSM模型,可以發現,ICP算法能有效地將像控點三維數據點融入無人機傾斜攝影煤堆DEM模型中,提高空洞自主修補能力,提升圖像有效配比,點云密度增加,從而模型的精細化程度及紋理特征得以大大改善。
(4)精度對比分析
為確保試驗結論的準確性,在煤場試驗區,可取編號為C7—C14等8個像控點作為核準點進行精度校驗,分別對比實測全站儀RTK三維坐標、無人機傾斜攝影DOM模型點坐標以及ICP技術合成的DOM模型點坐標,得出ICP技術合成前后核準點處的平面誤差和高程誤差。無人機傾斜攝影和ICP技術融合下的煤堆三維模型在核準校驗點處的平面誤差ΔX,ΔY及高程誤差ΔZ見表3。
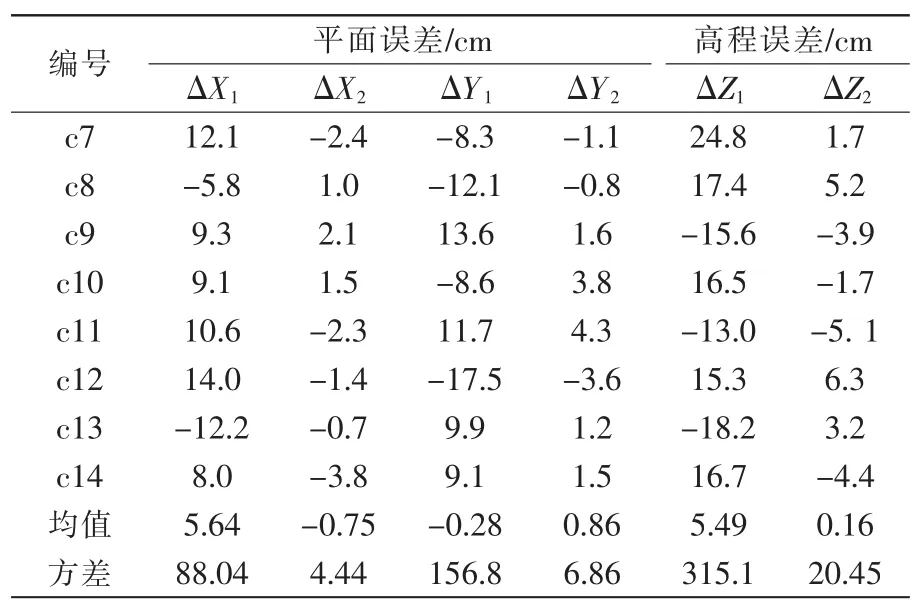
表3 模型誤差精度對比Tab.3 Model error precision comparison
表中,平面誤差ΔX1和ΔY1,以及高程誤差ΔZ1為無人機傾斜攝影技術下的模型誤差;平面誤差ΔX2和ΔY2,以及高程誤差ΔZ2為ICP融合技術下的模型誤差。
ICP融合技術下的煤堆DOM模型最大平面誤差為43 mm,最大高程誤差為63 mm,與傳統無人機傾斜攝影技術相比,加入本文算法的ICP融合技術相對誤差減小80%以上,滿足煤堆體積測量1∶1000精度比例尺要求。同時,在ICP算法的配準融合下,模型的數據點均差與方差均大幅度減小。為了更加直觀的表現,分別繪制2種技術下的精度對比曲線,如圖9所示。
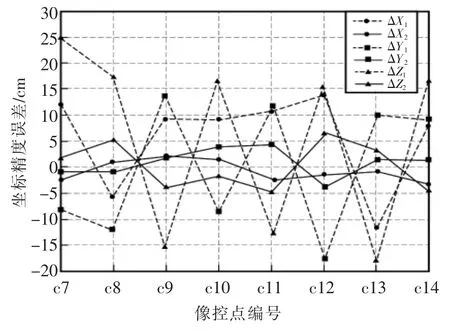
圖9 誤差精度對比曲線Fig.9 Error accuracy comparison curve
通過仿真試驗結果的分析可知,無人機傾斜攝影和全站儀三維測點掃描技術在改進ICP算法的融合應用下,能顯著改善煤堆的模型平滑度及真實感,修補模型空洞,提高煤堆體積的計算精度,為火力發電廠的運行、調度及效益核算等提供技術支撐。
3 結語
以上詳細敘述了無人機傾斜攝影技術和地面全站儀三維測點掃描技術的基本理論及步驟;提出了基于2類技術的改進ICP點云融合方法,有效增加了煤堆點云密度,自主修補傳統無人機傾斜攝影技術的煤堆模型空洞,提升建模效率,提高煤堆三維模型的分辨率及精度。然而,在建模速度上并不理想,還需要從區域層次ICP算法的角度再加以改進,從而得到速度更快、適配性更強的融合配準方法,保證三維模型的高效化建立。此外,傾斜攝影和測點掃描技術在無人機煤堆體積測量領域中的融合應用,或許能夠克服某些建筑物對目標區域的限制和遮擋,實現煤堆無死角化數據采集及分析,這將是煤堆體積測量領域內又一個全新的研究方向。對于三維重建領域,尚存在比較大的進步空間,在廣闊的商業價值背景下,著重加強三維建模的相關研究,不僅有助于模式識別、視覺圖像處理等技術的發展,而且必將推動人工智能技術邁向新紀元。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電測與儀表(2016年9期)2016-04-12 00:29:52
