智能型密集架中移動柜的設計
2019-08-09 02:14:26王明黎
自動化與儀表 2019年7期
關鍵詞:設計
楊 帆,王明黎
(1.武漢工程大學 電氣信息學院,武漢 430073;2.湖北省視頻圖像與高清投影工程技術研究中心,武漢 430073)
密集架是適用于機關、企事業單位存放圖書資料、檔案、樣品、檔案財務憑證、貨物的新型裝具。與傳統式書架、貨架、檔案架相比,儲存量大,節省空間。早在1947年瑞士工程師Hans Ingold發明了密集架并申請了專利。其后英國、日本、美國、德國等都對密集架進行研究,使其向智能化、安全可靠的方向發展。1989年,我國出現了首臺國產密集架[1-2]。在此后的數十年,密集架在國內得到了長足的發展,國內陸續出現了基于PLC控制、基于8位單片機、基于ModBus通信協議等不同類型的方案[3-7]。在此基于AVR單片機,采用CAN總線設計了智能密集柜系統中的移動柜。
1 系統方案研究
智能型密集架由上位機及下位機組成。其中,下位機由一列固定柜和若干列移動柜構成,移動柜采集裝在移動柜上的接近開關、光電開關等傳感器信號(運動到位的反饋信號、人員進入狀態等)后進行處理,并進行相應反應。移動柜裝有24 V的90ZWN24-120-A型無刷直流電機,確保通過移動柜觸摸屏可控制移動柜的移動。為保證在無電環境下也可以進行開關操作,除電機控制外,保留了手動操作。當電機運行時,離合器閉合,驅動傳動軸上的轉輪,移動柜移動;手動控制時,離合器斷開。文獻[8]給出了智能密集柜系統中固定柜的設計,在此主要闡述移動柜的設計。智能型密集架系統結構如圖1所示。
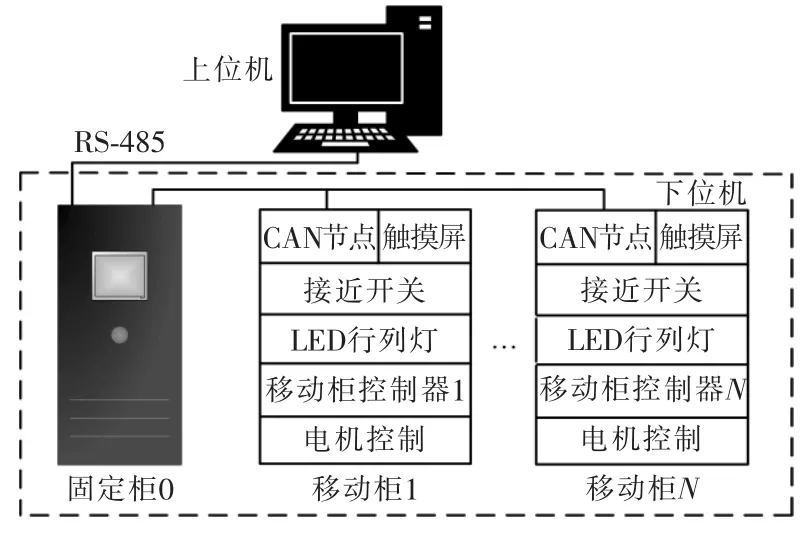
圖1 智能型密集架系統結構Fig.1 Intelligent mobile rack system structure
2 移動柜控制板設計
由于移動柜控制板對單片機的功能需求不高,故采用帶64 kB Flash存儲的Atmega6A作為控制板核心控制器。控制板主要完成以下功能:電源部分、RS-232串口通訊部分、CAN總線通信部分、紅外光電開關及磁接近開關部分部分、電機驅動部分。移動柜控制板結構如圖2所示。

圖2 移動柜控制板結構Fig.2 Mobile cabinet control board structure
移動柜控制板的電源部分采用24 V開關電源為電機供電,并通過LM2575降壓穩壓器將電壓轉為5 V給控制板供電。CAN總線部分選用控制器MCP2515CAN和收發器PCA82C251 CAN的組合,電源電路及CAN總線電路類似于固定柜控制板[8]的設計。
2.1 電機驅動電路設計
該系統選用聯誼電機公司的90ZWN24-120-A型無刷直流電機及LBDA048D10智能型直流無刷電機驅動器作為移動柜的驅動電機。系統采用PWM調速方式,電機驅動電路如圖3所示。
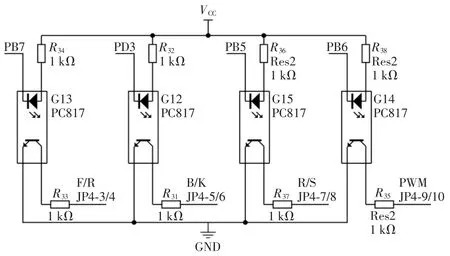
圖3 電機驅動電路Fig.3 Motor drive circuit
微控制器使用 PB7,PD3,PB5,PB6 控制驅動器,4條線路都采用PC817光耦進行電路隔離。PB7接驅動器F/R接口正反轉控制端;PD3接驅動器B/K接口剎車控制端;PB5接驅動器R/S接口啟停控制端;PB6接驅動器PWM轉速給定模擬量信號輸入端。可以通過固定柜的觸摸屏、移動柜的觸摸屏及移動柜的按鍵來控制柜體的移動,當某列移動柜收到命令移動時,通過CAN總線將移動命令傳給其他需要移動的移動柜。
2.2 移動柜安全控制設計
為防止密集架移動柜移動時人員在柜體內,可能因為密集架的擠壓對人員造成傷害及柜體靠攏或者打開時,柜體到位而電機未及時停止而造成機械損壞,系統設計了以下安全監測設備:
1)接近開關 在移動柜人員進入的一側兩端各裝有1個LJ18A3-8-Z/BX型接近開關。該開關用于檢測磁性金屬,檢測距離為8 mm。當柜體閉合到位時,接近開關檢測到磁性金屬(柜體),開關發送指令到單片機,進而控制電機動作。除柜體兩端外,柜體底部也裝有接近開關,在柜體打開到位的地面焊有鐵片。當柜體打開到位時,接近開關會檢測到鐵片,然后將信號傳送給單片機,進而控制電機動作。
2)漫反射式紅外光電開關 為保證工作人員的安全,在該系統移動柜入口安裝有E3F-DS30C4漫反射式紅外光電開關。當工作人員人進入架體時,紅外光電開關會檢測到漫反射回來的紅外線,可知是否有人經過。該傳感器響應速度可達到2 ms,感應距離為7~30 cm,符合密集架系統的安全要求。
3)紅外安全光幕光柵傳感器 在該系統密集架區域兩端裝有紅外安全光幕光柵傳感器,可在密集架底盤與地面之間形成光幕,感知密集架區域中是否有人員或障礙物。
接近開關及光電開關電路如圖4所示。
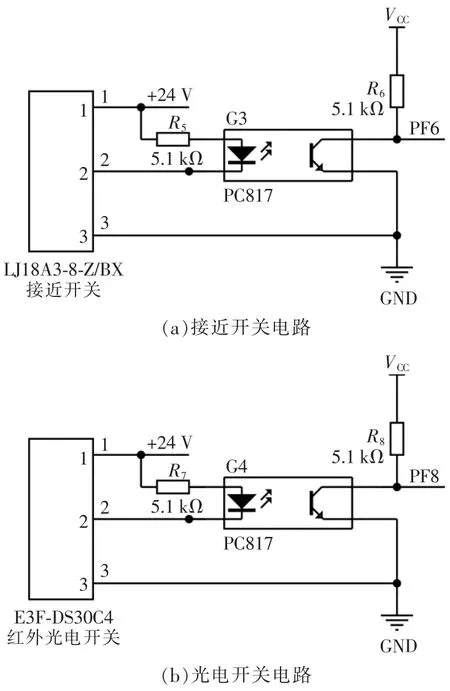
圖4 接近開關及光電開關電路Fig.4 Circuit of proximity switches and photoelectric switches
3 移動柜軟件設計
移動柜控制板功能包括控制直流無刷電機驅動器以控制直流無刷電機進行正傳反轉停止動作、與液晶觸摸屏進行通信、與固定柜進行通信。移動柜主程序流程如圖5所示。
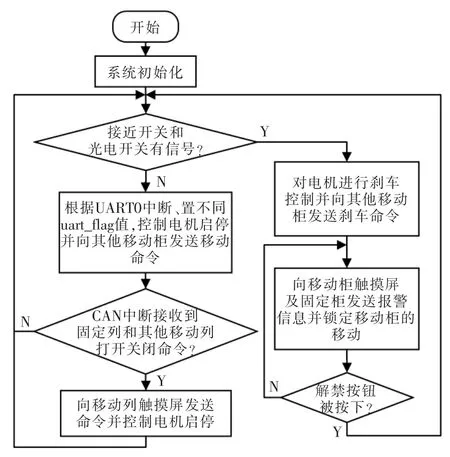
圖5 移動柜主程序流程Fig.5 Main program flow chart of mobile cabinet
在移動柜軟件設計中,設置了3個中斷,即UART0中斷、CAN中斷、外部中斷。①UART0中斷用于接收液晶觸摸屏發來的消息,根據不同命令置uart_flag為不同的值,MCU處理后通過MCP2515給固定柜和其他移動柜發送命令。②CAN中斷接收其他列發來的消息,根據其他列發來消息的不同,置全局標記位flag為不同的值,并做出相應的反應。③外部中斷用于檢測接近開關和紅外光電開關的狀態,判斷有無遮擋物。若有遮擋物,則移動柜緊急剎車,并向固定柜和其他移動柜發送報警信息。
在此選用顯控科技的EA-070B液晶觸摸屏,采用SATOOL組態軟件進行開發。液晶觸摸屏的設計類似于固定柜的AK-121SA液晶觸摸屏[8]的設計。
4 設計結果及分析
將設計的移動柜控制板與液晶觸摸屏連接,調試結果如圖6所示。

圖6 液晶觸摸屏界面Fig.6 LCD touch screen interface
由圖可見,觸摸屏上有“打開”“關閉”“停止”“禁止”4個按鍵。其中,“打開”“關閉”適用于控制移動柜移動方向;“停止”用于將移動中的架子暫停下來;“禁止”不僅將移動中的架子暫停下來,而且鎖定其他按鍵,不能操作移動列的“打開”或者“關閉”移動。
當移動柜在運動時檢測到人員在通道中,會使系統處于禁止狀態,此時必須按下圖6所示“解禁”按鈕,系統才能繼續工作。經調試檢驗固定柜與移動柜通信穩定。
5 結語
所設計的的智能型密集架移動柜,具有良好的人機界面,并采用接近開關及光電開關以保障工作人員安全。CAN總線通以保障了移動柜與固定柜之間通信的穩定性和實時性,具有很好的實用價值。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
