基于改進(jìn)干擾觀測(cè)器的穩(wěn)定平臺(tái)擾動(dòng)抑制技術(shù)
2019-08-01 02:24:52丁祝順蔣鴻翔來(lái)新曉
導(dǎo)航與控制 2019年3期
丁祝順,李 潔,蔣鴻翔,來(lái)新曉
(1.北京航天控制儀器研究所,北京100039;2.國(guó)防科技大學(xué),長(zhǎng)沙410073)
0 引言
航空遙感主要被應(yīng)用于資源勘查、地理測(cè)繪等領(lǐng)域,用于獲取高分辨率的遙感數(shù)據(jù)。由于在飛行過程中受到大氣湍流、突風(fēng)等因素的影響,載機(jī)難以保持自身姿態(tài)的平穩(wěn),使得遙感相機(jī)的視軸低頻晃動(dòng),成像質(zhì)量下降。同時(shí),載機(jī)發(fā)動(dòng)機(jī)的高頻振動(dòng)使得遙感相機(jī)的成像質(zhì)量進(jìn)一步降低[1]。作為航空遙感系統(tǒng)的重要組成部分,穩(wěn)定平臺(tái)采用被動(dòng)或主動(dòng)隔振的方式濾除發(fā)動(dòng)機(jī)的高頻振動(dòng)。利用機(jī)/電伺服控制方案隔離載機(jī)的低頻角運(yùn)動(dòng),以及隔離穩(wěn)定平臺(tái)自身由裝配等原因帶來(lái)的不平衡擾動(dòng)和摩擦等擾動(dòng),可使相機(jī)視軸始終保持垂直指向[2-4]。
穩(wěn)定平臺(tái)的伺服控制精度決定了相機(jī)的視軸穩(wěn)定性,因此,研究平臺(tái)的擾動(dòng)抑制方法具有重要的意義。經(jīng)典的PID控制方法采用了速度環(huán)/位置環(huán)的雙環(huán)控制方案,可以抑制擾動(dòng)的影響。但是,由于受限于陀螺及位置姿態(tài)系統(tǒng)等傳感器本身的精度,伺服控制的精度往往難以滿足要求。本文在對(duì)不平衡擾動(dòng)、摩擦和基座角運(yùn)動(dòng)等擾動(dòng)進(jìn)行分析的基礎(chǔ)上,設(shè)計(jì)了一種改進(jìn)干擾觀測(cè)器的控制策略。通過觀測(cè),得到穩(wěn)定平臺(tái)的各種擾動(dòng),將其反饋到控制端,最終實(shí)現(xiàn)對(duì)擾動(dòng)的抑制。相比經(jīng)典控制方法,控制精度提高了2~3倍。
1 穩(wěn)定平臺(tái)簡(jiǎn)介
如圖1所示,穩(wěn)定平臺(tái)由外至內(nèi)依次為橫滾框、俯仰框和方位框,遙感相機(jī)與位置姿態(tài)系統(tǒng)(POS)被安裝在最內(nèi)框。作為穩(wěn)定平臺(tái)控制回路的傳感器件,POS敏感平臺(tái)的姿態(tài)信息,并通過數(shù)字伺服控制器驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),保持視軸的指向。
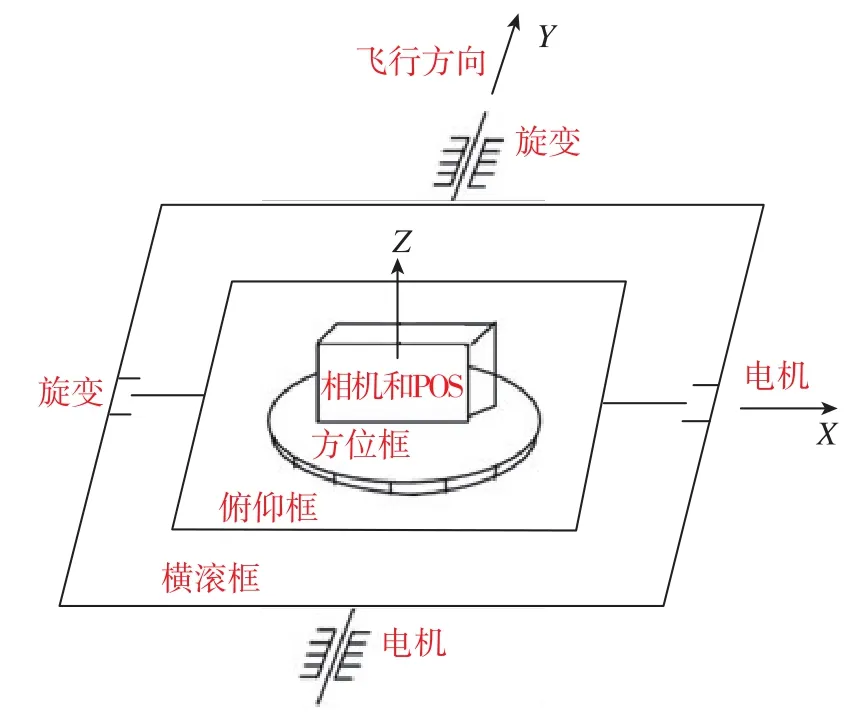
圖1 穩(wěn)定平臺(tái)原理框圖Fig.1 Principle block diagram of stabilized platform
穩(wěn)定平臺(tái)控制系統(tǒng)采用雙環(huán)控制:內(nèi)環(huán)為速度環(huán),能夠使穩(wěn)定平臺(tái)保持慣性穩(wěn)定;外環(huán)為位置環(huán),能使穩(wěn)定平臺(tái)跟蹤地理水平。穩(wěn)定平臺(tái)的控制框圖如圖2所示。
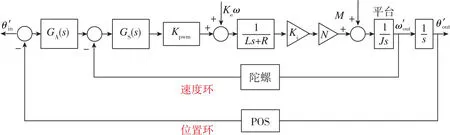
圖2 穩(wěn)定平臺(tái)控制框圖Fig.2 Control block diagram of stabilized platform
在圖2中,1/(Ls+R)為電機(jī)模型,Ki為電機(jī)力矩系數(shù),N為齒輪傳動(dòng)比,J為穩(wěn)定平臺(tái)轉(zhuǎn)動(dòng)慣量,Kg為陀螺標(biāo)度因數(shù),KA為慣組標(biāo)度因數(shù),Gs(s)為速度環(huán)控制器,GA(s)為位置環(huán)控制器,M為穩(wěn)定平臺(tái)的干擾力矩。干擾力矩的存在會(huì)使穩(wěn)定平臺(tái)的指向精度及視軸穩(wěn)定精度變差,因此需要對(duì)其進(jìn)行分析。
2 穩(wěn)定平臺(tái)干擾分析
由于機(jī)械結(jié)構(gòu)設(shè)計(jì)和加工精度的影響,穩(wěn)定平臺(tái)框架的質(zhì)心與幾何中心偏離,產(chǎn)生不平衡力臂,進(jìn)而在重力加速度和載體運(yùn)動(dòng)干擾加速度的共同作用下產(chǎn)生不平衡力矩[5]。不平衡力矩可以表示為

在式(1)中,m為穩(wěn)定平臺(tái)的質(zhì)量,g為重力加速度,a為干擾加速度,f為干擾加速度的頻率,l為不平衡力臂。
作為承載慣性穩(wěn)定平臺(tái)的基座,飛行載體在飛行過程中會(huì)受到大氣湍流等外界擾動(dòng)因素的影響,使得載體發(fā)生運(yùn)動(dòng)。對(duì)于慣性穩(wěn)定平臺(tái)而言,這便產(chǎn)生了基座角運(yùn)動(dòng)。由于基座角運(yùn)動(dòng)是由飛行載體受到各種內(nèi)外擾動(dòng)因素作用而形成的,其作用形式是多樣的,在分析過程中可將其看作典型的正弦形式的擾動(dòng),故其可表示為

在式(2)中,A為基座角運(yùn)動(dòng)幅值,ω為基座角運(yùn)動(dòng)頻率。
摩擦廣泛存在于慣性穩(wěn)定平臺(tái)系統(tǒng)中,會(huì)使平臺(tái)在低速運(yùn)行時(shí)產(chǎn)生不平穩(wěn)現(xiàn)象。Stribeck模型可以描述慣性穩(wěn)定平臺(tái)系統(tǒng)中存在的靜摩擦、動(dòng)摩擦及低速運(yùn)動(dòng)時(shí)摩擦隨速度增加而減小的性質(zhì)。因此,采用Stribeck模型來(lái)描述慣性穩(wěn)定平臺(tái)系統(tǒng)中存在的摩擦現(xiàn)象[6]。Stribeck摩擦模型可以表示為

在式(3)中,Mc為庫(kù)倫摩擦力矩,Ms為最大靜摩擦力矩,ω為接觸面之間的相對(duì)角速度,σ為粘性摩擦系數(shù),ωs為Stribeck速度。
3 改進(jìn)干擾觀測(cè)器
干擾觀測(cè)器(Disturbance Observer,DOB)可以將由外界擾動(dòng)而引起的被控對(duì)象的輸出與標(biāo)稱模型的輸出之間產(chǎn)生的差異輸入到控制輸入端,并將其與實(shí)際的外界擾動(dòng)做差,實(shí)現(xiàn)對(duì)擾動(dòng)的完全抑制[7-8]。干擾觀測(cè)器的原理圖如圖3所示。
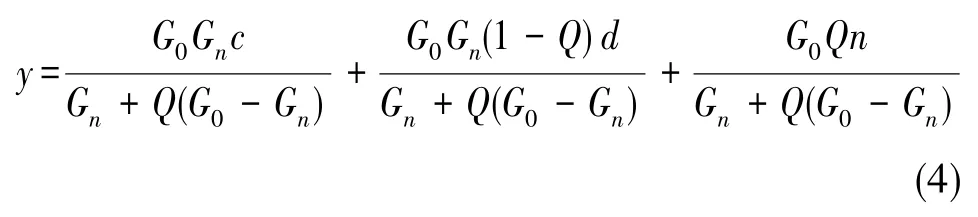
在圖3 中,Q(s)為低通濾波器,G0(s)為被控對(duì)象傳遞函數(shù),為被控對(duì)象標(biāo)稱模型的逆,由圖3可得
將Q(s)設(shè)計(jì)為低通濾波器,故在低頻段Q(s)≈1時(shí),系統(tǒng)可以實(shí)現(xiàn)對(duì)頻率較低的外界擾動(dòng)的抑制;而在高頻段Q(s)≈0時(shí),系統(tǒng)能抑制測(cè)量噪聲的影響。
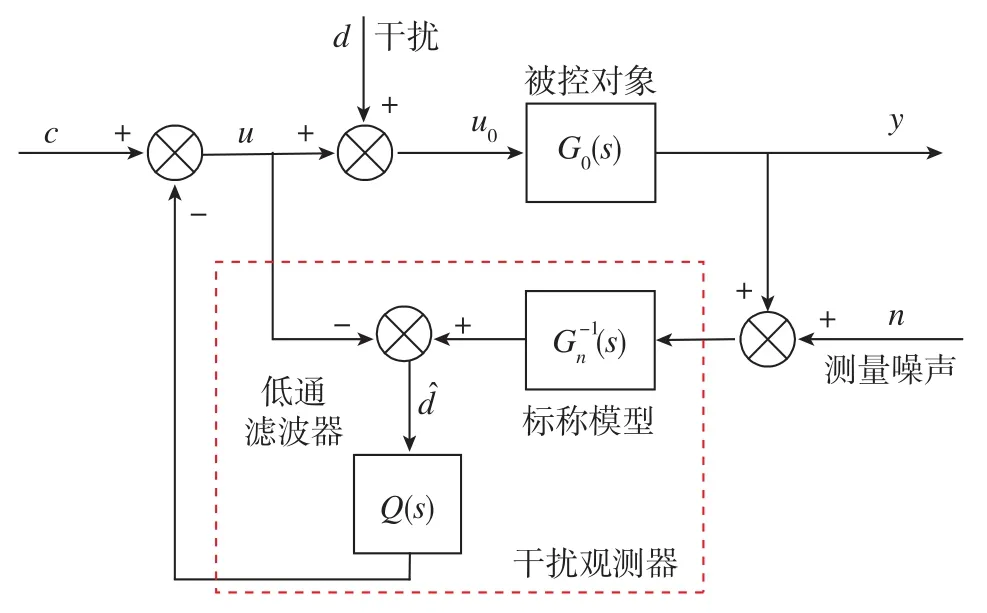
圖3 干擾觀測(cè)器的原理圖Fig.3 Schematic diagram of disturbance observer
低通濾波器Q(s)的具體表達(dá)形式為
根據(jù)圖1可得,被控對(duì)象為


將干擾觀測(cè)器代入到慣性穩(wěn)定平臺(tái)系統(tǒng)中,可以表示為如圖4所示的形式。
加入干擾觀測(cè)器可以觀測(cè)出系統(tǒng)中的擾動(dòng),將觀測(cè)出的擾動(dòng)加到控制端,可以實(shí)現(xiàn)對(duì)擾動(dòng)和測(cè)量噪聲的抑制。但是,被控對(duì)象的傳遞函數(shù)一般為真有理分式,這使得其標(biāo)稱模型的逆中包含微分環(huán)節(jié),在物理上難以實(shí)現(xiàn),因此需要對(duì)其進(jìn)行改進(jìn)。從圖4中可以看出


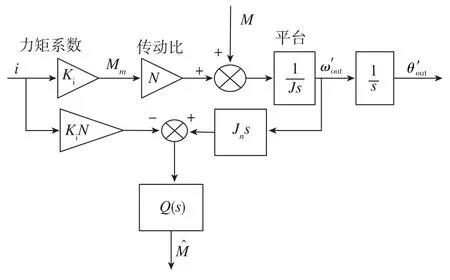
圖4 帶有干擾觀測(cè)器的慣性穩(wěn)定平臺(tái)框圖Fig.4 Diagram of inertial stabilized platform with disturbance observer
從式(9)可以看出,干擾觀測(cè)器包含一階微分環(huán)節(jié),會(huì)導(dǎo)致系統(tǒng)對(duì)高階量測(cè)噪聲敏感。因此,可以對(duì)式(9)進(jìn)行如下變化,避免出現(xiàn)微分環(huán)節(jié)

這樣,改進(jìn)后的干擾觀測(cè)器如圖5所示。
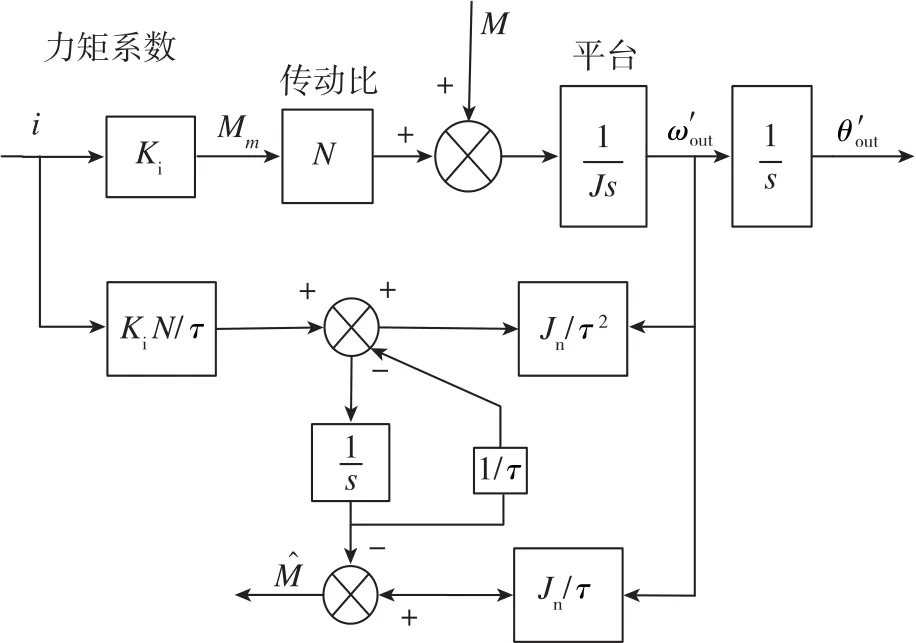
圖5 帶有改進(jìn)干擾觀測(cè)器的慣性穩(wěn)定平臺(tái)框圖Fig.5 Diagram of inertial stabilized platform with improved disturbance observer
4 仿真與分析
穩(wěn)定平臺(tái)的仿真參數(shù)如下:電機(jī)電樞電阻為8.6Ω,電機(jī)力矩系數(shù)為0.25Nm/A,減速比為90,穩(wěn)定平臺(tái)轉(zhuǎn)動(dòng)慣量為2.767kg·m2,陀螺標(biāo)度因子為1.2×106LSB/(rad/s),低通濾波器的濾波時(shí)間常數(shù)為0.002s。
穩(wěn)定平臺(tái)的質(zhì)量為75kg,設(shè)偏心距為1cm,載體運(yùn)動(dòng)干擾加速度的幅值為1g,則不平衡擾動(dòng)的表達(dá)式為Mmass=7.35+7.35sin2πft。
穩(wěn)定平臺(tái)允許的最大角速度幅值為20(°)/s,本文將基座角運(yùn)動(dòng)的幅值取為平臺(tái)運(yùn)動(dòng)最為劇烈的情況,基座角運(yùn)動(dòng)的表達(dá)式為ωb=20sin2πft。
當(dāng)不平衡擾動(dòng)的干擾角速度頻率和基座角運(yùn)動(dòng)頻率均為1Hz時(shí),在PID控制與改進(jìn)干擾觀測(cè)器的控制下,穩(wěn)定平臺(tái)的角度輸出如圖6所示。當(dāng)不平衡擾動(dòng)的干擾角速度頻率和基座角運(yùn)動(dòng)頻率均為2Hz時(shí),在PID控制與改進(jìn)干擾觀測(cè)器的控制下,穩(wěn)定平臺(tái)的角度輸出如圖7所示。
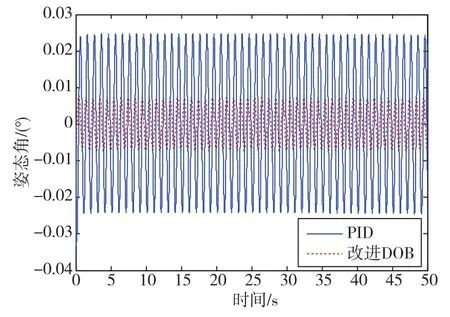
圖6 擾動(dòng)頻率為1Hz時(shí),PID控制與干擾觀測(cè)器的控制效果Fig.6 Effect of PID control and disturbance observer control when frequency of disturbance is 1Hz
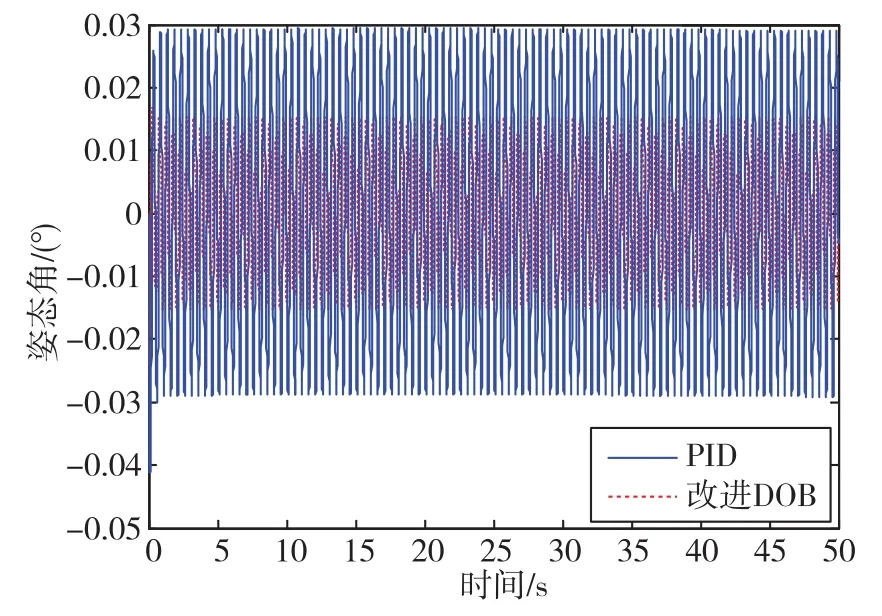
圖7 擾動(dòng)頻率為2Hz時(shí),PID控制與干擾觀測(cè)器控制效果Fig.7 Effect of PID control and disturbance observer control when frequency of disturbance is 2Hz
從圖6可以看出,當(dāng)擾動(dòng)頻率為1Hz時(shí),PID控制下穩(wěn)定平臺(tái)輸出的角度峰值為0.024°。在加入改進(jìn)干擾觀測(cè)器之后,穩(wěn)定平臺(tái)角度輸出峰值約為0.008°,提高了3倍。從圖7可以看出,當(dāng)擾動(dòng)頻率為2Hz時(shí),PID控制下穩(wěn)定平臺(tái)輸出的角度峰值為0.03°。在加入改進(jìn)干擾觀測(cè)器之后,穩(wěn)定平臺(tái)角度輸出峰值約為0.015°,提高了2倍。仿真結(jié)果表明,在不同的擾動(dòng)作用下,改進(jìn)干擾觀測(cè)器的擾動(dòng)抑制效果均優(yōu)于PID控制,大大提升了穩(wěn)定平臺(tái)的穩(wěn)定效果。
5 結(jié)論
本文通過分析航空遙感穩(wěn)定平臺(tái)受到的不平衡擾動(dòng)、摩擦和基座角運(yùn)動(dòng)等擾動(dòng)的形成機(jī)理和作用形式,在介紹干擾觀測(cè)器原理的基礎(chǔ)上,設(shè)計(jì)了一種改進(jìn)干擾觀測(cè)器,并對(duì)其擾動(dòng)抑制效果進(jìn)行了仿真分析。仿真結(jié)果表明,相比傳統(tǒng)PID控制,改進(jìn)干擾觀測(cè)器的擾動(dòng)抑制效果更好,平臺(tái)的穩(wěn)定精度得到了進(jìn)一步提高。
