水流載荷作用下的潛艇潛望鏡力學特性實測與分析
2019-07-30 06:47:00王延林張大勇趙煜岳前進
船舶力學 2019年7期
王延林, 張大勇, 趙煜, 岳前進,2
(1.大連理工大學 海洋科學與技術學院,遼寧 盤錦124221;2.大連理工大學 工業裝備結構分析國家重點實驗室,遼寧 大連116023)
0 引 言
潛望鏡是潛艇的重要組成部分,被人們比喻為潛艇的“眼睛”。利用潛望鏡,艇上人員可以環視海面,測定目標的距離和方位,同時利用潛望鏡還可以測量天體以便對潛艇進行定位[1]。如果潛艇在航行的時候艇員使用潛望鏡進行觀察(潛望狀態),潛望鏡由于水流的作用會產生彎曲、振動等問題。潛望鏡彎曲后將影響其測量精度,尤其對于導航潛望鏡,將嚴重影響其測天精度。常規潛艇在低于12 kns航速航行時,不至于影響潛望鏡的性能[2],但是當潛艇航行中對水面情況進行觀察(潛望)或發現敵情需要緊急下潛(潛躍)的時候,由于航速較快,潛望鏡會受到較大的水流力的作用并產生彎曲、振動等問題。潛望鏡與潛望鏡套管屬于精密構件,在較大荷載及振動情況下會產生磨損、疲勞等問題,此外潛望鏡的振動影響艇員觀察海面情況,強烈的振動甚至會損壞潛望鏡的光學元件而造成功能失效等問題。
綜上所述,潛望鏡的力學性能是保證潛望鏡正常工作的重要指標。掌握潛望鏡在水流載荷作用下的結構振動及變形響應情況對于艇上人員正確操作潛望鏡及新型潛望鏡及其光學器件的設計都具有一定的指導意義。潛艇潛望鏡近似為一光滑圓柱體,很多學者對圓柱體在均勻流場內的受力情況進行了大量的數值模擬及模型實驗研究[3-5],并將數值及實驗結果進行了對比分析,很多工作都具有借鑒意義。但是海上環境復雜,干擾因素較多,因此數值模擬和模型實驗的方法都存在其局限性,和真實環境中的潛望鏡受力情況差別較大。海上實艇實驗無疑可以獲得最真實的實驗數據,再結合數值模擬等方法,就可以準確評估真實環境中的潛望鏡的力學性能。因此本文通過現場實艇實驗的方法,獲取潛望鏡在潛望及潛躍狀態下的結構動應變響應信息,再結合理論分析與數值模擬的手段,對潛望鏡在水流載荷作用下的力學特性進行實測與分析。而在實驗設計時,考慮到常規應變測量技術都是在結構表面粘貼應變片或者焊接封裝好的應變式傳感器[6-7],如果直接粘貼應變片,需要考慮現場防水等問題,不便于操作;其次由于潛艇潛望鏡屬于精密構件,表面光滑度需要滿足一定的要求,因此傳感器的安裝和拆卸過程不能破壞潛望鏡的光滑表面,也不可以進行例如焊接等操作;同時實艇試驗都是在實驗海區進行的,由于對實驗時間要求比較嚴格,因此現場需要能夠快速安裝和快速拆卸傳感器。綜合考慮各種因素,本文選用了裸光纖光柵(FBG)應變傳感器[8],并采用了準分布式測量技術[9]。同時,為了現場便于快速定位和安裝,還在實驗室設計了光纖光柵快速安裝的方法,實現了現場對潛艇潛望鏡動應變響應的快速測量。通過對實測數據的分析,對潛艇潛望鏡的靜力與動力特性進行了分析,并將實測結果與Morison公式計算結果以及Fluent數值模擬結果進行了對比分析。
1 實艇實驗方案設計與實施
1.1 實艇實驗方案設計
實驗方案設計的目的是通過實測潛望鏡上動應變響應情況來分析評估潛望鏡的水動力特性。潛望鏡在升起時可以簡化為懸臂梁結構,在水流載荷作用下的結構最大應變發生在潛望鏡根部與上導套(如圖3)接觸部位。同時潛望鏡部分管體在導流罩內部,可以認為不受水流力的作用。因此潛望鏡在導流罩內部的結構受力可以簡化為受到集中載荷作用的懸臂梁,其應變分布規律是線性的。故實驗方案設計為測量導流罩內盡量靠近根部的彎曲應變響應。測量方案分別在前后潛望鏡靠近根部的某一截面上每隔90°安裝一光纖光柵應變傳感器,布置方向為沿著潛望鏡管方向。這樣既可以準確定位潛艇的縱向與橫向位置,又可以兩兩互為補償,消除溫度的影響。其中每個潛望鏡的四個傳感器通過傳輸光纖串連,前后潛望鏡的兩根傳輸光纖一起經由填料函密封處理后進入潛艇的艙內,連接到SI425光柵解調儀的兩個通道上,并通過筆記本電腦與SI425通訊與數據采集。實驗方案布置如圖1所示。由于本次實驗需要潛艇行駛到指定實驗海域進行實艇實驗,因此潛艇行駛過程中潛望鏡需要收起,待到達實驗海域后升起進行實驗。故傳感器需要在到達實驗海域后進行快速的安裝,實驗完成后還需要快速清除傳感器,便于潛望鏡收起后駛離實驗海域。因此實驗方案設計為在岸邊進行線纜的布設,待到達實驗海域后再進行傳感器的安裝和實驗。
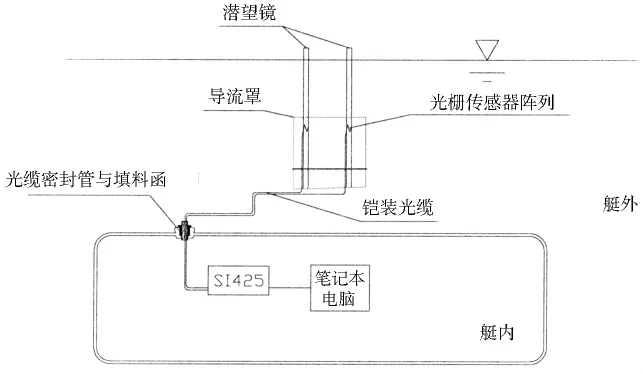
圖1實艇實驗方案布置圖Fig.1 Experiment layout
1.2 光纖光柵水下應變測量方案設計
在水下進行應變測量需要保證傳感器防水。潛望鏡表面光滑,為便于潛望鏡的升降,所以要求選用的傳感器便于安裝和拆卸,而且此過程中還不能破壞潛望鏡表面的光滑程度。針對上述問題與要求,本文選用了裸光纖光柵,其優點是:二氧化硅介質,不怕海水的影響;裸光纖直徑只有125 μm對結構影響小;只需要用502膠水粘貼于結構上,安裝與拆卸都很方便,因此十分適合本實驗要求。
此外,由于實驗需要準確測量潛望鏡在水流載荷作用下的應變響應情況,所以傳感器布點位置設計為沿著潛艇行駛的方向,每隔90°布設一光纖光柵應變傳感器。為了在現場安裝的時候保證傳感器安裝的精度與速度,本實驗進行了充分的前期準備。首先,準備一塑料薄板,長度為潛望鏡的周長,并在每隔1/4周長位置割一豎向橢圓鏤空,然后將事先準備好的光纖光柵串布置到塑料板上,如圖2所示。安裝的時候將塑料板圍在潛望鏡的鏡管上固定好,以保證安裝位置的準確性。然后再在鏤空處將光柵粘貼在鏡管上,以保證傳感器的快速安裝與準確布設。而且裸光柵比較脆弱,安裝不小心會將傳感器折斷,經封裝之后,可保障傳感器的安全。通過上述設計,保證了傳感器現場安裝過程的安全、準確與快捷。

圖2自行設計封裝的光柵串陣Fig.2 Packaged grating arrays
1.3 實艇傳感器安裝
潛艇駛入實驗海域之后,潛望鏡升起并進行了傳感器的安裝。安裝完后,在艇內用測試儀器對安裝的傳感器進行了測試,但是只測量到了后潛望鏡的應變響應,前潛望鏡信號丟失。由于實驗時間限制,無法進行傳感器的更換,故后續實驗結果分析只針對后潛望鏡。后潛望鏡光柵列陣安裝位置在距根部85 cm處,如圖3所示。
1.4 海試實驗工況設計
傳感器與設備安裝、調試完成之后,對潛望鏡進行實艇實驗。實驗分三大工況,分別為主電機雙進一潛望狀態(工況1)、主電機雙進二潛望狀態(工況2)和潛越狀態(工況3)。其中潛望狀態(工況1和2)根據潛望鏡的角度不同,又分成9種不同小工況,實驗時每種工況的實際航速、水深、潛望鏡角度等參數如表1所示。
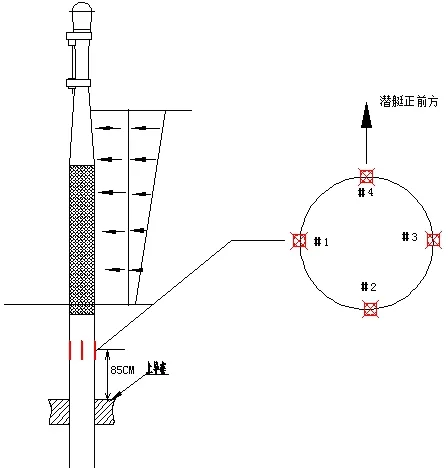
圖3后潛望鏡測點布置示意圖Fig.3 Sensor placement diagram of the downstream periscope
2 實驗結果分析
2.1 實測應變響應與溫度補償
各個工況實驗進展順利,實測應變響應信號良好。首先分析每種工況下每個通道應變變化情況,以工況1-7為例。潛望鏡1、3通道與2、4通道彎曲應變情況如圖4所示。其中1、3通道與2、4通道是相隔180°的一組傳感器,在彎矩的作用下,他們的應變大小應該相等,方向相反,一個受拉,一個受壓,從實測曲線可以發現這種規律。每組的兩個傳感器都是大小相等,方向相反,相位正好相差180°。此外每個通道的應變均值都是負的,這是由于潛望鏡是由水面潛入水下,水面與水下的溫差大,產生負應變的現象,因此需要消除溫度效應對實測應變的影響。
分析實測各個通道應變響應的組成,其中,1、3通道為潛望鏡橫向應變(垂直潛艇行駛方向),2、4通道為潛望鏡縱向應變(沿著潛艇行駛方向),因此有:

式中:εH為潛望鏡橫向彎曲應變;εV為潛望鏡縱向彎曲應變;εT為溫度應變。由于4個通道的溫度效應是一樣的,因此溫度應變也是一樣的,故有

由公式(2)就可以求得潛望鏡測點處消除溫度影響后的縱向和橫向彎曲應變情況。

圖5縱向和橫向彎曲應變時程曲線Fig.5 Time history of vertical and horizontal bending strain

圖6潛望鏡潛越應變時程Fig.6 Strain time history of the emergency dive
分析各工況時程曲線,發現潛望鏡縱向和橫向彎曲應變都存在波動情況。其中工況1和工況2情況下,振動曲線的均值較小,在10~20微應變左右,波動幅度在30微應變左右,如圖5所示。工況3振動情況最劇烈,如圖6所示,最大波動量達140微應變左右,而且橫向振動情況要遠大于縱向的振動情況,分析認為此工況發生了比較強烈的渦激振動問題,具體原因將在后續文中進行詳細的分析。
2.2 潛望鏡動力特性分析
潛望鏡的自振頻率是潛望鏡設計、潛艇操作等環節的重要參考指標。而水中潛望鏡由于受到海水的阻尼力的作用,其自振頻率是變化的。因此分別對空氣中的潛望鏡和水中不同航速下的潛望鏡自振頻率進行分析比較。
2.2.1 潛望鏡水面振動頻率分析
當潛艇在水面漂浮且潛望鏡完全升起的狀態下,對實測到的應變響應進行頻譜分析,得到頻譜如圖7所示。頻譜圖上有兩個峰值分別為0.25 Hz和5.75 Hz。其中0.25 Hz的頻率接近波浪的頻率,因此其為潛艇隨波浪漂浮的頻率,故5.75 Hz即為潛望鏡在空氣中的自振頻率。
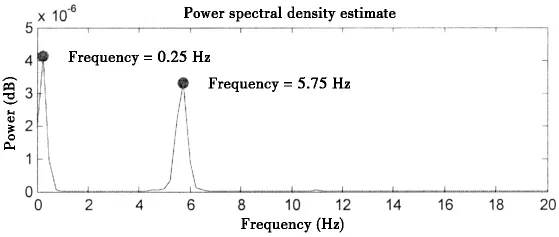
圖7水面飄浮時潛望鏡振動頻譜Fig.7 Vibration spectrum when the periscope floating on the water
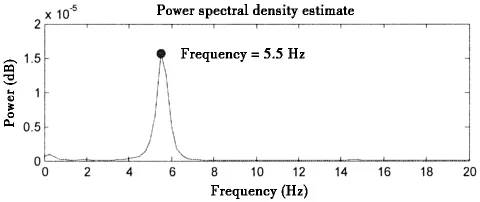
圖8 潛望鏡工況1-5下振動頻譜Fig.8 Periscope vibration spectrum in condition 1-5

圖9工況3-1振動頻譜Fig.9 Periscope vibration spectrum in condition 3-1
2.2.2 潛望鏡水下振動頻率分析
在水下航行的時候,通過實測應變響應時程分析每種工況下潛望鏡的振動頻率。通過分析發現,潛望鏡在工況1和工況2情況下,振動頻率在5.5 Hz左
右,如圖8所示。而工況3-1的振動頻率只有5 Hz,如圖9所示。說明潛望鏡水下振動頻率隨著與水流的耦合作用是發生變化的,流速越大,其自振頻率越小。
2.2.3 潛望鏡渦激振動分析
通過實測應變數據發現,潛望鏡在不同工況下都有不同程度的振動情況。尤其是在3-1工況下,振動尤為劇烈,而且橫向振動幅度要遠大于縱向振動幅度,故認為有可能發生渦激振動現象,如圖6所示。所謂的渦激振動是指:當波浪、海流和風荷載在流經結構(一般是指細長結構)時,在一定的流速條件下,可在結構的兩側交替地形成強烈的旋渦,旋渦脫落會對結構產生一個周期性的可變力,使得結構在與流向垂直方向發生橫向振動[10]。
由于當雷諾數一定的情況下渦激振動形態和強度往往與約化速度有關,下面給出了約化速度的表達式:

式中:Ur為約化速度;U為水流速度;fn為圓柱體的固有頻率;D為圓柱體的直徑。換算得到潛艇不同航速下的約化速度如表2所示。
下面來分析振動原因。由于實測中升起了前后兩個潛望鏡,因此前后兩個潛望鏡可以看做是串列雙圓柱體。在均勻流場中串列雙圓柱體后,在一定雷諾數范圍內的旋渦發放可以產生渦激振動。根據文獻[11] 可知,和單圓柱繞流的情況相比,串列雙圓柱繞流的圓柱周圍流動更加復雜。當圓柱間距比L/D(L為兩圓柱中心的間距,D為圓柱直徑)較小時,下游圓柱的存在會顯著改變上游圓柱的尾流形態,只有當間距比超過臨界值(與雷諾數、圓柱長徑比等有關)時,下游圓柱對上游圓柱的影響才可以忽略。與之不同,上游圓柱對下游圓柱的影響則會一直延續到很大的間距比[12]。圖10與圖11為文獻[11] 給出的無量綱化的不同圓柱間距比L/D情況下的結構最大振幅(上游圓柱與下游圓柱)隨約化速度變化的情況。
表2約化速度列表Tab.2 Reduced velocity of different speeds

圖10上游圓柱最大振幅隨約化速度變化情況Fig.10 Variation of the maximum amplitude with the reduced velocity at different spacing ratios of upper cylinder
由于兩潛望鏡之間的距離L=1.565 m、直徑D=0.18 m,所以可得L/D=8.7。與單圓柱相比,串列雙圓柱的下游圓柱鎖定區間開始的約化速度要大于單圓柱的情況,鎖定區間的范圍也明顯更寬。下游圓柱振幅達到最大值以后,隨著約化速度的增加,振幅出現不同程度的下降,間距比越小,其下降速度越慢。這說明潛艇以8.3 kns航速潛望時,潛望鏡的振動相對較小,沒有發生頻率鎖定現象;而潛艇在以10 kns的航速運動的時侯,約化速度為4.9,同時發生流向共振和橫向共振。而且橫向振動情況大于流向振動情況。以上對渦激振動分析的結論與實測現象相吻合,說明3-1工況下確實發生了渦激振動現象。
2.3 擬靜水流力分析
2.3.1 潛望鏡水流載荷分析
根據實測應變數據可以看出,潛望鏡在水流力的作用下會發生振動問題。因此所測應變是動應變。根據實測動應變曲線,可以得到不同工況下的被測截面應變的最大值,但得到的被測截面的最大應變值并不是整個潛望鏡的最大應變。由分析可知,潛望鏡危險截面即應變最大點在上導套與潛望鏡接觸處。所以需要根據實測數據推算潛望鏡的最大應變值。

圖11下游圓柱最大振幅隨約化速度變化情況Fig.11 Variation of the maximum amplitude with the reduced velocity at different spacing ratios of downstream cylinder
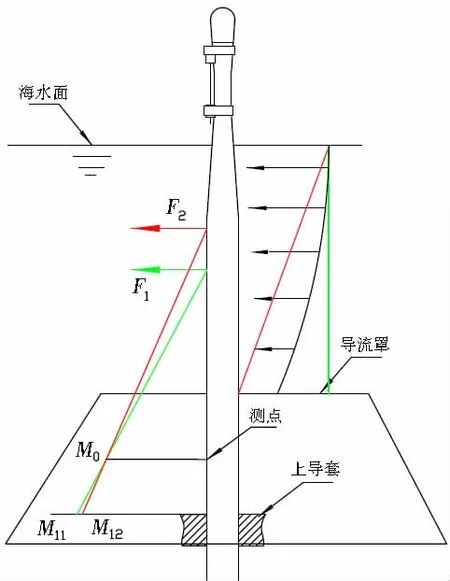
圖12潛望鏡水流力分析示意圖Fig.12 Analysis diagram on flow force
分析被測截面與危險截面之間的關系,如圖12所示。由于水流分布比較復雜,無法給出準確的水流分布情況。水流力的分布形式介于三角形荷載與均布荷載之間[13]。其中均布荷載可以等效為(只考慮導流罩內潛望鏡的受力情況)作用在距底面1/2處的集中荷載(F1);三角形荷載可以等效為距底面1/3處的集中荷載(F2)。根據測量到的應變值是不變的,即被測截面所受的彎矩的大小M0是不變的。所以在這兩種等效荷載作用下,導套處的彎矩是不同的,而導套處的真實彎矩Mmax應該是介于這兩種情況之間的,即

由幾何條件推導得到:


故實際的擬靜水流載荷F介于上述兩種載荷之間,即:

由上述公式得到不同工況下潛望鏡上導套處最大應變、應力及擬靜水流力數據如表3所示。通過比較可以發現,工況3-1的擬靜水流力最大,可達4.5 kN,對應的最大應力為44.1 MPa,占許用應力(166 MPa)的26.6%,仍滿足強度要求。
進而得到對應的均布載荷F1和三角載荷F2分別為:

表3潛望鏡根部最大應力應變情況Tab.3 Maximum stress and strain of the periscope
2.3.2理論計算與數值模擬結果的對比分析
通過Morison公式[13]和Fluent軟件分別對潛望鏡所受的水流力進行估算。計算時分別取8.3 kns和10 kns航速。
(1)水流載荷計算Morison公式
一般來說當只考慮海流作用時,對圓形構件單位長度上的海流荷載F可由下式計算:

式中:F為海流力(kN/m),Uc為海流速度(m/s),Cd為水流力系數,ρ為海水密度(kg/m3),A為單位長度構件在與流向垂直平面上的投影面積(m2),海流力的作用方向與海流方向相同。對于圓柱體來說Cd取為0.73;海水的密度ρ為1 020.24 kg/m3。
(2)水流力數值模擬軟件Fluent
Fluent是目前處于世界領先地位的CFD軟件之一,它是一個用于模擬和分析在復雜幾何區域內的流體流動與熱交換問題的專用CFD軟件。本次計算模型采用的水域是20 m×20 m×20 m正方體,潛望鏡模型通過真實的潛望鏡尺寸建立。由于潛望鏡的尺寸相對于整個水域來說很小,所以在離潛望鏡周圍較遠處的水域采用六面體單元來劃分網格,在潛望鏡附近的水域采用四面體為主六面體為輔的網格來劃分,這樣也比較接近實際的情況(如圖13)。對于海水密度,黏度動力系數,摩擦系數等參數都采用實測值設置。由于整個水域比較大,所以在模型的前后左右均設為速度邊界條件,在模型的上表面采用壓力出口邊界條件,潛望鏡處和模型的地面設為Wall邊界條件。求解器選為隱式非藕合穩定求解器,最后通過迭代2 000次達到收斂。計算得到的潛望鏡壓力分布云圖如圖14所示。

圖13劃分網格后的模型圖Fig.13 Mesh model
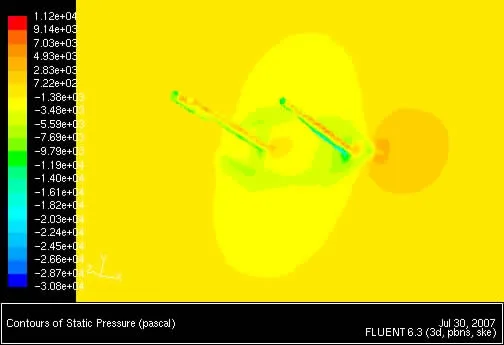
圖14潛望鏡壓力分布云圖Fig.14 Pressure contours of periscopes
(3)結果對比分析
用Morison公式和Fluent軟件進行計算的結果與實測數據進行比較,如表4所示。
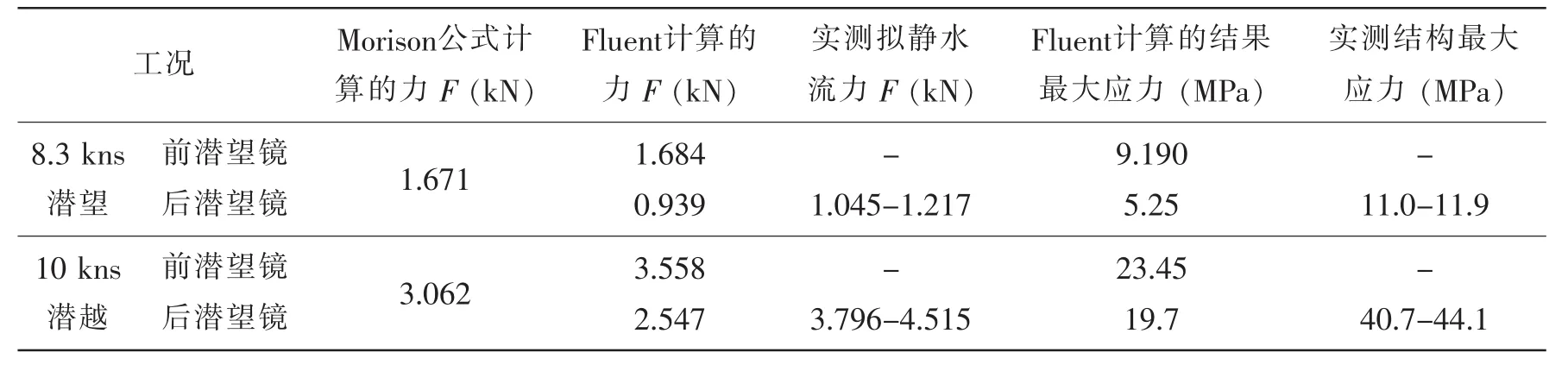
表4水流力結果對比Tab.4 The flow forces comparison
由上面的結果可看出在8.3 kns潛望狀態下,用Fluent計算前潛望鏡的水流力(1.671 kN)與Morison公式計算的(1.687 kN)很接近,而后潛望鏡的水流力偏小(0.939 kN)。這說明Morison公式與Fluent模擬的結果比較接近,而由于前潛望鏡的遮蔽效應,后潛望鏡的水流力要小于前潛望鏡的水流力,而Morison公式沒有考慮到遮蔽效應。進而與實測后潛望鏡的擬靜水流力比較,實測水流力(1.045~12.17 kN)要大于數值結果(0.939 kN)。分析其原因:一方面實測水流力不但包含潛艇航行時候產生的水流影響,還包含了現場波浪、海流等因素的影響,這些因素都會增加潛望鏡受到的水流載荷;另一方面擬靜水流力是將實測動應變簡化為擬靜力作用下的應變,進而推導得到的水流力,故其比真實水流載荷也要偏大一些,因此實測結果與計算結果也比較吻合。再比較Fluent計算的結構最大應力(5.25 MPa)與實測最大應力(11 MPa),實測最大應力要遠大于數值模擬的結果,具體原因還有待進一步分析。但是實測值要遠大于數值模擬結果(接近二倍的關系),這一現象需要重點關注和進行更加深入的分析。
此外,在10 kns潛躍的情況下,用Fluent計算前潛望鏡的水流力(3.558 kN)與Morison公式計算的(3.062 kN)有一些差別,可能是由于潛躍情況下潛望鏡頂端不是規則的圓柱體,故Morison公式計算結果偏差較大。由于前潛望鏡的遮蔽效應,后潛望鏡的水流力偏小,而與實測水流力進行比較發現,實測水流力要遠遠大于數值結果,甚至大于Fluent計算的前潛望鏡的水流力(3.558 kN)。同時實測結構的最大應力也遠大于數值結果。由本文前面論述可知,在10 kns潛躍的工況下,潛望鏡發生了比較強烈的渦激振動問題,故實測水流力及結構最大應力都很大。而數值模擬結果沒有考慮到渦激振動的問題,故結果偏小。由上述分析可知,在10 kns航速情況下,潛望鏡所受的擬靜水流力和結構應力都比較大,結構振動響應也比較劇烈,潛望鏡存在較大的風險,可能造成潛望鏡的功能失效甚至是結構損傷。故潛艇在超過10 kns航速運行的時候應避免升起潛望鏡進行潛望或進行緊急下潛的操作。
3 結 論
潛望鏡是潛艇上的重要設施,其力學特性的分析對于潛望鏡的改良、制造或使用都具有重要參考意義。本文通過實艇實驗對潛望鏡在不同工況下的應變響應進行了測量。通過對測量數據的分析,對潛望鏡的靜力與動力特性進行了分析,主要結論歸納如下:
(1)潛艇在低于10 kns航速航行的時候,潛望鏡在水流的作用下會發生振動問題,但是振動幅度較小,對潛望鏡結構及功能影響較小。
(2)潛艇在高于10 kns航速航行的時候,潛望鏡會發生強烈的渦激振動問題。潛望鏡的振動會增加結構的應力響應及損傷情況。潛躍工況下結構的振動尤為強烈,需要盡量避免在潛望鏡升起的情況下進行緊急下潛操作。
(3)在沒有發生渦激振動問題的情況下,潛望鏡的數值模擬結果與實測結果吻合較好,可以用數值方法對潛望鏡進行分析,但是實測最大應力情況要偏大一些,這一點需要重點關注。而在10 kns以上航速航行時候,數值結果偏小,需要結合實測結果進行設計與分析。
(4)實驗中沒有實測到前潛望鏡的數據,對于前潛望鏡的分析可以參考后潛望鏡的實測結果并結合數值模擬的方法進行相關分析。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
