Trimble RTX技術性能測試與應用分析
2019-07-23 08:59:36吳建梅房新玉
水道港口 2019年3期
關鍵詞:測量
吳建梅,柯 敏*,房新玉
(1.交通運輸部天津水運工程科學研究所,天津 300456;2.天津水運工程勘察設計院 天津市水運工程 測繪技術重點實驗室,天津 300456)
星站差分技術是近年來快速發展起來的一種定位技術,相對于現有已較為成熟的偽距差分RTD(Real Time Dynamie)和載波相位差分RTK(Real Time Kinematic)技術,前者屬于星基差分定位技術,而后者屬于陸基差分定位技術,這使得星站差分技術可不受地域條件限制,應用范圍更為廣泛。
目前,星站差分技術在國內工程測量領域應用較為廣泛,在系統分類方面,主要包括Navcom公司的StarFire技術、Fugro公司的Starfix技術、Hexagon公司的TerraStar技術、Trimble公司的OmniSTAR及RTX技術[1]、日本的QZSS技術。在技術應用方面,劉亮以StarFire技術為例,分析星站差分技術相對傳統差分技術優勢,探討其在水運工程測量領域的應用與優勢[2];張振軍、許捍衛等通過StarFire技術在內河航道水深測量定位中的應用測試,表明其能穩定、高效、高精度地應用于大比例尺水下地形測量[3-4];安云松采用OmniSTAR技術在國內外兩地采集三組數據進行分析,得出滿足采樣率及觀測時長要求的星站差分靜態單點定位坐標均值精度較高,滿足石油勘探測量起算點的精度要求[5];萬家歡等利用StarFire技術開展遠海島礁控制測量,并與PPP成果進行比對,得出StarFire技術平面精度達到厘米級,可替代PPP來快速獲取符合精度要求的控制點坐標[6]。
由于對StarFire及OmniSTAR等差分技術已有大量文獻資料進行介紹說明,而對RTX技術系統介紹及精度統計分析較少,因此本文對Trimble RTX技術進行相關性能測試,并結合水運工程測量現狀,對其應用領域進行分析說明。
1 RTX系統介紹
1.1 RTX技術簡介
RTX(Real-Time eXtended)實時差分擴展技術是Trimble新近開發的一種定位技術,通過將多種創新技術融合在一起,使得用戶能夠在不采用各類基準站電臺或網絡參考站鏈接的情況下,實現在地球表面任何地方進行厘米級定位。其系統組成見圖1。

圖1 RTX系統組成Fig.1 RTX system composition
RTX系統工作原理為:利用分布于全球的約100個跟蹤站,連續獲得實時衛星(包括時鐘誤差、軌道誤差)和大氣數據,通過高度準確的模型和算法來生成RTX差分數據,然后將差分數據以CMRx格式進行壓縮后注入L波段對地靜止衛星或互聯網后廣播到GNSS接收機,從而提高其定位精度。
從本質上說,RTX是采用精密單點定位技術進行定位的,其既可以實現實時精密單點定位,也可用于事后處理。與其他星站差分系統組成類似,RTX系統主要包含GNSS衛星系統、RTX衛星跟蹤網絡、L波段通信衛星/互聯網系統、用戶系統。
1.2 RTX服務類型

表1 RTX差分改正服務Tab.1 RTX differential correction services
RTX差分改正支持GPS、GLONASS、QZSS及北斗系統,其服務可應用于農業、林業、公用事業、陸地測量、海洋測量等諸多領域,目前RTX星站差分系統提供多種實時差分改正服務,具體見下表1。
上述初始化時間與使用的接收機類型及使用位置有關,表1所列數值為全球范圍內大部分地區初始化時間。在美國部分地區及中、西歐大部分地區,CenterPoint RTX及FieldPoint RTX初始化時間更短,一般優于5 min。如無特殊說明,本文后續所列RTX均特指CenterPoint RTX。
需要注意的是,目前儀器接收的RTX實時差分改正數據采用的坐標參考框架為ITRF2014歷元2005.00,與最新的WGS84(G1762)坐標系存在微小差異。WGS84(G1762)與ITRF2008歷元2005.00基本一致。
2 RTX性能測試
為驗證RTX系統性能,本文通過現場測試進行驗證。現場測試控制點K001位于天津市濱海新區天津港周邊,靠近渤海海域,周邊較為空曠,無明顯遮擋地物,測試儀器采用Trimble R10 GPS雙頻接收機,測試內容包括RTX收斂時間、內符合精度、外符合精度及后處理精度統計。其中內符合精度、外符合精度通過連續觀測模式,采集觀測時間為11 h、采樣間隔為15 s,采用頻率為1 Hz的數據進行統計分析;后處理精度采用靜態觀測模式分別采集2次,每次為2 h的觀測數據通過在線解算進行統計分析。


圖2 RTX平面及高程收斂時間Fig.2 Convergence time of RTX in plane and elevation
2.1 收斂時間
利用RTX進行測量前均存在收斂過程,收斂時間的長短與接收機類型及測量環境相關,當測量環境發生顯著變化時還會存在發散現象[7]。收斂時間包括兩種情形:已知控制點成果下收斂時間和未知控制點成果下收斂時間。經過現場測試,在已知控制點成果情況下,通過將控制點成果輸入儀器中,RTX能在1 min內快速收斂獲得固定解;在未知控制點成果情況下,需等待RTX自動收斂以獲得固定解。本次在同一控制點上,通過同一天內測試三次,每次間隔時間為10 min,分別統計RTX收斂精度及收斂時間,具體見圖2。
RTX自動收斂過程中,開始時平面及高程精度均較差,瞬時收斂精度均大于1 m,收斂過程中精度受環境影響存在變差情形,但整體呈現逐步收斂至固定狀態,此時平面及高程殘差均優于10 cm。三次時間測試中,第一次收斂時間約為33 min,第二次收斂時間約為17 min,第三次收斂時間約為14 min,收斂時間逐步縮短,收斂速率基本一致。
2.2 內符合精度
內符合精度主要反映了觀測數據的內部質量情況。目前常用的內符合精度統計方法采用各個測量值與組內平均值相比較,即計算所有觀測值的平均值,再與每個觀測值計算較差[8]。設各觀測值li與平均值l得差值為vi=li-l,則內符合精度公式為
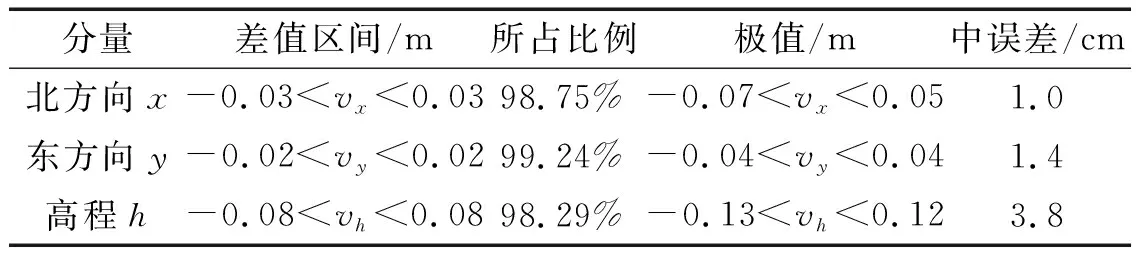
表2 RTX測量內符合精度統計表Tab.2 Statistical of Internal accuracy for RTX measurement

(1)
將測試采集的數據按公式(1)計算,分別得到北方向x、東方向y及高程h的內符合精度統計,具體見表2。
內符合精度統計中,各坐標分量差值的頻率及分布情況見圖3。

圖3 內符合各坐標分量差值統計Fig.3 Difference statistics of coordinate components in internal accuracy
從表2及圖3可知,RTX內符合精度統計中,各坐標分量差值分布較為合理,符合正態分布情況,其中北方向x主要差值區間為-0.03~0.03 m、占比98.75%,東方向y主要差值區間為-0.02~0.02 m、占比99.24%,高程h主要差值區間為-0.08~0.08 m、占比98.29%。平面方向中誤差優于2 cm,高程方向中誤差優于4 cm,內符合精度良好。
2.3 外符合精度
外符合精度主要用于判定系統測量精度,其精度統計采用測量值與真值進行比較,分析RTX系統性誤差。將高等級控制點的坐標成果作為真值,計算各個觀測值與真值之差,設各觀測值li與真值l0的差值為Δi=li-l0,外符合精度公式為
(2)
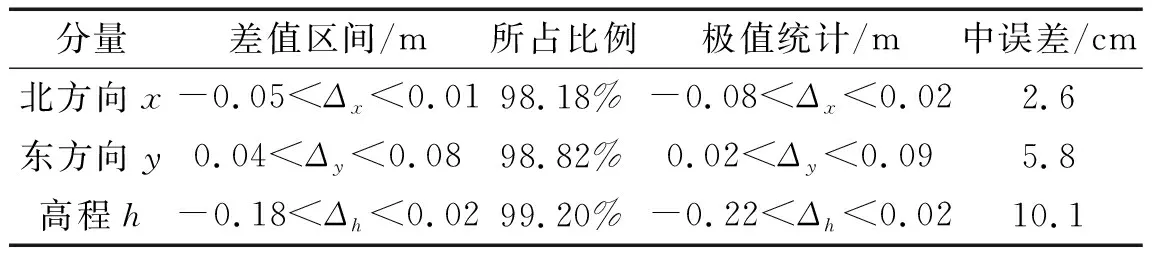
表3 RTX測量外符合精度統計表Tab.3 Statistical of external accuracy for RTX measurement
將測試采集數據按公式(2)計算,分別得到北方向x、東方向y及高程h的外符合精度統計,具體見表3。
外符合精度統計中,各坐標分量差值分布情況見圖4。
從表3及圖4可知,RTX外符合精度統計中,各坐標分量差值存在明顯方向偏差,其中北方向x主要差值區間為-0.05~0.01 m、占比98.18%,東方向y主要差值區間為0.04~0.08 m、占比98.82%,高程h主要差值區間為-0.18~0.02 m、占比99.20%。平面各方向中誤差優于6 cm,高程中誤差約為10 cm,平面方向精度及離散性均優于高程方向。
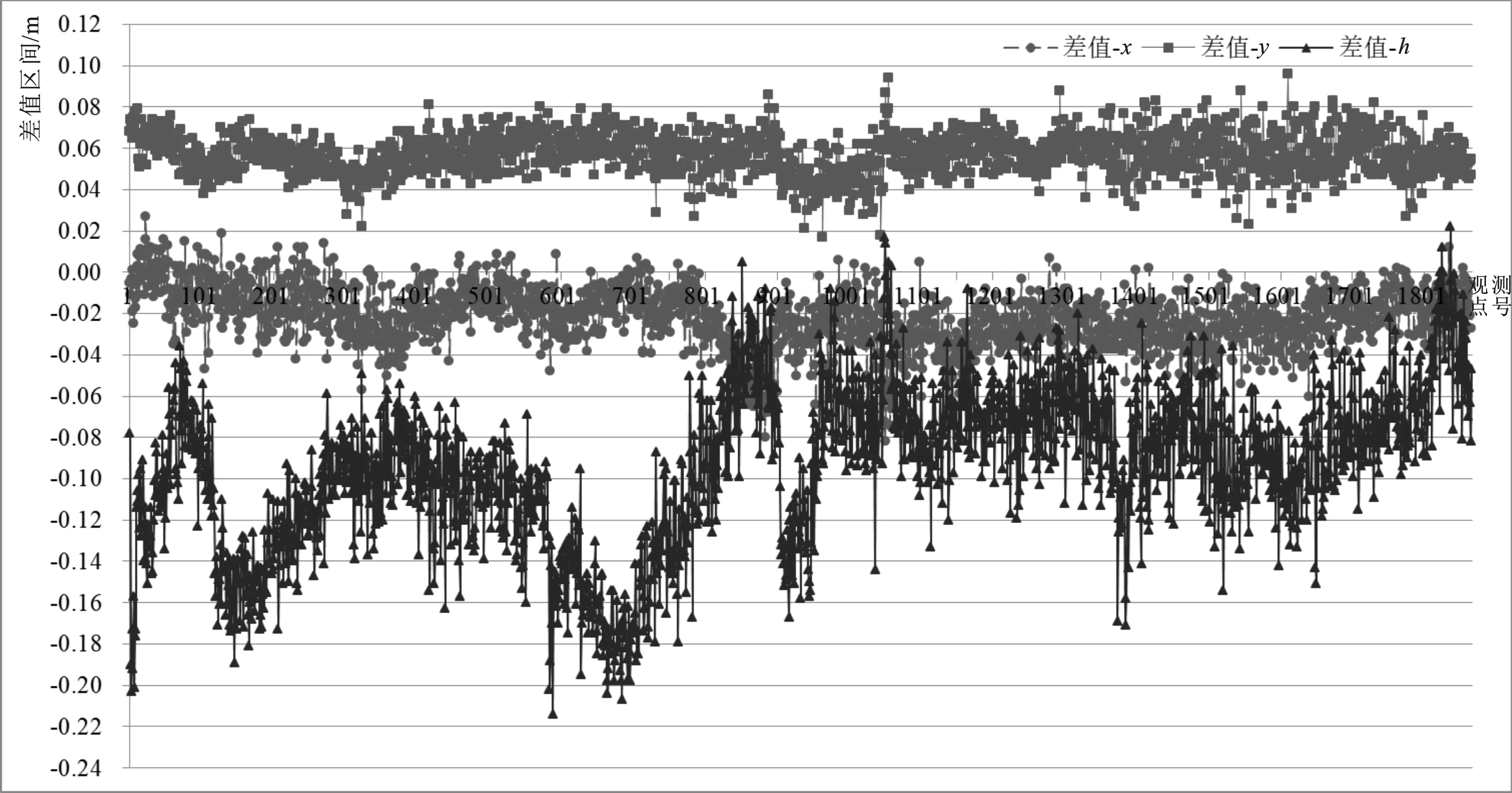
圖4 外符合各坐標分量差值分布Fig.4 Difference distribution of coordinate components in external accuracy
2.4 后處理精度
Trimble CenterPoint RTX post-processing(簡稱RTX-PP)是Trimble公司提供的RTX后處理服務。此應用服務允許用戶在線上傳符合相關觀測要求的靜態GNSS數據至Trimble公司RTX后處理服務中心,通過選擇不同的坐標系統、地殼板塊模型來獲取對應的定位解算成果。RTX-PP后處理通過相關算法模型消除或削弱影響定位的各項誤差,同時還進行如下解算校正:(1)衛星和接收機天線校正;(2)固體潮汐;(3)波浪潮;(4)海潮加載效應;(5)相對論修正;(6)相位疊加;(7)代碼和載波相位偏差[9]。
本次利用在測試控制點K001上采集3次,每次為2 h靜態觀測數據,選取目前國內施行的2000國家大地坐標系下成果進行精度統計,具體步驟如下:
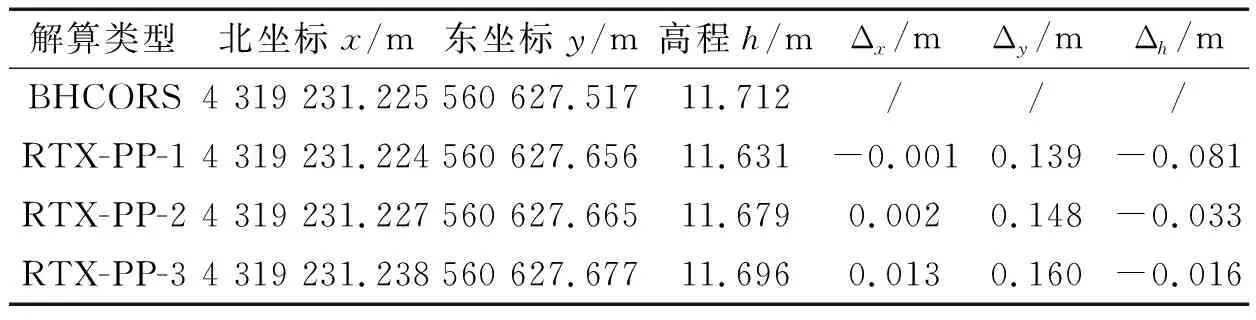
表4 RTX-PP與BHCORS解算結果對比表Tab.4 Comparison of calculation results between RTX-PP and BHCORS
(1)分別將GNSS靜態觀測數據上傳至RTX-PP在線服務中心,坐標系統選擇CGCS2000、地殼板塊選擇自動選取,填寫電子郵件地址后幾分鐘便可收到控制點K001的解算結果。
(2)利用濱海新區連續運行衛星定位綜合服務系統(簡稱BHCORS),通過同步觀測,采用靜態解算方式獲得控制點K001在CGCS2000坐標系下成果。
(3)將BHCORS解算成果作為真值,并與3次RTX-PP解算成果進行比對,結果見表4。
從表4解算結果可以看出:在CGCS2000坐標系下,不同時段3次RTX-PP解算結果平面最大差值為0.025 m,高程最大差值為0.065 m,解算結果符合性較好;RTX-PP解算結果與BHCORS解算結果平面最大差值為0.161 m,高程最大差值為0.081 m,RTX-PP直接解算結果精度為分米級。分析認為,由于RTX-PP解算成果是基于整個歐亞板塊歐拉矢量求得[10],精度不高。如需獲得CGCS2000坐標系下高精度成果,需進行相應的框架變換及歷元變換,利用高精度速度場模型可獲得厘米級解算精度[9]。
3 應用分析
現行的JTS131-2012《水運工程測量規范》主要包括控制測量、地形測量、水深測量、變形測量、施工測量,根據RTX技術性能測試結果,其應用分析如下:
(1)控制測量:目前RTX-PP后處理成果經過框架及歷元變換后,其精度可達到厘米級,相較于傳統控制測量,其優勢包括不需要同步觀測,單站采集靜態數據進行單獨處理即可。同時,在CGCS2000坐標系下,可減少對作為起算點的高級控制點的數量要求,采用1組平面、高程控制點作為校核點后便可快速開展測量作業。
(2)地形測量:可滿足中、小比例尺地形圖測量精度要求,傳統RTK測量前需先布設控制網及架設基準站,采用RTX則不需要進行上述作業步驟,直接進行現場地形測量,且不受電臺信號遮擋及傳播距離限制,適用范圍更廣。
(3)水深測量:RTX定位精度為厘米級,現有RBN-DGPS定位精度為分米級,前者定位精度更高,因此采用RTX可提高水深測量定位精度,尤其是在多波束測量作業中。同時,RTX覆蓋范圍為全球,因此其作業范圍更廣,尤其是在深遠海地區及海外欠發達地區,可用性及便捷性更大。
(4)變形測量:由于變形測量的測量精度需達到毫米至亞毫米級,因此RTX目前還不具備在變形測量領域全面推行條件,但RTX-PP后處理精度可達厘米級,可在變形測量特定作業環節中使用。
(5)施工測量:主要涉及施工定位及放樣,目前在疏浚和航道整治施工放樣及水工建筑施工放樣領域定位普遍采用DGPS,由于RTX精度更高,故可滿足此類領域定位精度要求。
4 結論
本文以Trimble RTX技術為例,分別從收斂時間、內符合精度、外符合精度及后處理精度對其進行性能測試及應用分析,主要結論如下:
(1)在已知控制點成果情況下,RTX可快速收斂至固定狀態。在未知控制點成果情況下,RTX自動收斂時間約為30 min,與標定時間基本一致,且后續收斂時間逐步縮短。
(2)RTX內符合精度平面中誤差優于2 cm,高程中誤差優于4 cm;外符合精度各方向中誤差優于6 cm,高程中誤差約為10 cm,與標定精度基本一致。在成果精度及離散性方面,平面方向明顯優于高程方向。
(3)在CGCS2000坐標系下,3次RTX-PP解算結果內符合性較好,平面較差優于3 cm;與BHCORS解算結果相比,平面及高程精度均為分米級。如要獲得高精度的CGCS2000坐標,則需進行框架及歷元變換,其精度可達毫米級,具體方法及參數可從ITRF官網獲取。
(4)星站差分技術作為一種廣域(全球)差分技術,在無基準站或CORS系統的區域,尤其是一帶一路沿線發展中國家并未建立完善的陸基差分改正服務系統,其重要性及優勢十分明顯。RTX技術精度較高,可廣泛應用于水運工程測量領域,提高測量精度及效率,節省工作時間及成本。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00