蘋果采摘機(jī)器人末端執(zhí)行器恒力柔順機(jī)構(gòu)研制
2019-07-23 06:14:10苗玉彬鄭家豐
農(nóng)業(yè)工程學(xué)報 2019年10期
苗玉彬,鄭家豐
蘋果采摘機(jī)器人末端執(zhí)行器恒力柔順機(jī)構(gòu)研制
苗玉彬,鄭家豐
(上海交通大學(xué)機(jī)械與動力工程學(xué)院,上海 200240)
為了減少采摘機(jī)器人末端執(zhí)行器在夾持過程中對果實造成的損傷,該文通過在末端執(zhí)行器上設(shè)置柔順機(jī)構(gòu),并對柔順機(jī)構(gòu)力學(xué)性能進(jìn)行計算,求解果實無損采摘所需的柔順恒力特性。首先,基于形狀函數(shù)建立邊界條件約束下的柔順梁非線性常微分控制方程;然后,利用打靶法將上述邊值問題重新描述為初值問題,并結(jié)合遺傳算法進(jìn)行初值優(yōu)化求解,采用序列二次規(guī)劃法優(yōu)化梁的形狀函數(shù),使其在一定變形范圍內(nèi)實現(xiàn)恒力輸出;最后,在給出求解所需參數(shù)和柔順機(jī)構(gòu)初始形狀參數(shù)基礎(chǔ)上,以蘋果采摘為例,通過優(yōu)化計算,使柔順梁對果實的夾持力維持在7.9 N左右,非線性有限元計算和力-位移特性試驗驗證了計算結(jié)果的準(zhǔn)確性,多次蘋果夾持試驗的抓取完好率為95%,驗證了該柔順機(jī)構(gòu)無損夾持蘋果的可行性。研究結(jié)果可為不同類型果實的恒力夾持提供參考。
機(jī)器人;末端執(zhí)行器;設(shè)計;恒力柔順機(jī)構(gòu);打靶法
0 引 言
采摘作業(yè)是果蔬生產(chǎn)中最耗時、費力的一個環(huán)節(jié)。隨著農(nóng)業(yè)勞動力的減少,農(nóng)業(yè)生產(chǎn)成本相應(yīng)提高,果蔬采摘機(jī)器人逐漸成為農(nóng)業(yè)機(jī)器人領(lǐng)域的研究熱點[1]。果實的無損采摘是采摘機(jī)器人的關(guān)鍵技術(shù)之一[2-7],主要通過末端執(zhí)行器和作物果實直接接觸。由于果實一般比較脆弱柔軟,形狀及生長狀況比較復(fù)雜,采摘過程中夾持力過大容易造成果實表面或內(nèi)部損傷,而夾持力不足又無法抓牢果實。因此,合理地優(yōu)化設(shè)計末端執(zhí)行器,實現(xiàn)對果實的柔順抓取,是實現(xiàn)果實無損采摘的研究重點。
目前末端執(zhí)行器無損夾持一般基于力的反饋控制實現(xiàn),即利用壓力傳感器實時測量對果實的夾持力,將實際輸出與期望輸出對比構(gòu)成閉環(huán)控制,使夾持力保持恒定。如王學(xué)林等[8]提出基于灰色預(yù)測的增量式比例積分力控制算法,根據(jù)預(yù)測模型的精度調(diào)整預(yù)測力偏差所占的權(quán)重,計算出穩(wěn)定控制夾持力的校正量。周俊等[9]以當(dāng)前抓取力和滑動信號小波變換的細(xì)節(jié)系數(shù)作為控制器的輸入,末端執(zhí)行器閉合的距離作為控制器的輸出,采用混合學(xué)習(xí)算法結(jié)合減法聚類算法進(jìn)行訓(xùn)練,使抓取力超調(diào)量得到有效限制。Dimeas等[10]提出基于模糊控制的分層遞階控制策略,通過模糊控制器調(diào)節(jié)采摘草莓的抓取力。但由于受到成本和使用環(huán)境等因素限制,精確控制的末端執(zhí)行器難以在農(nóng)業(yè)領(lǐng)域得到廣泛應(yīng)用[11]。
近年來,柔順機(jī)構(gòu)引起廣泛關(guān)注。柔順機(jī)構(gòu)是一種依靠機(jī)構(gòu)中柔性構(gòu)件的變形來完成全部運動,從而實現(xiàn)力或能量傳遞的機(jī)構(gòu)[12-16]。柔性構(gòu)件的應(yīng)用使得在一定范圍內(nèi)可以進(jìn)行恒力輸出,減少恒力機(jī)構(gòu)對力傳感和控制的需求。如張贏斌[17]研究了柔順鉗和柔順恒力機(jī)構(gòu)設(shè)計的拓?fù)鋬?yōu)化,采用相對密度法和非線性有限元方法對柔順鉗進(jìn)行了優(yōu)化設(shè)計。Merriam等[18]借助遺傳算法和有限元建模控制柔順伸縮器的結(jié)構(gòu)參數(shù),使其具有一定范圍內(nèi)的恒力輸出。Wang等[19]用打靶法設(shè)計靜平衡機(jī)構(gòu)和恒力機(jī)構(gòu),將它們串聯(lián)得到有穩(wěn)定恒力輸出的恒力夾鉗,并使用有限元模型和實物模型驗證結(jié)果。Pham等[20]參考柔性雙穩(wěn)態(tài)機(jī)構(gòu)設(shè)計人字形柔順屈曲梁,通過非支配排序遺傳算法優(yōu)化梁的形狀實現(xiàn)輸出力的調(diào)節(jié)。Liu等[21]采用傾斜的基于彎曲梁的柔性雙穩(wěn)態(tài)機(jī)構(gòu)來構(gòu)造負(fù)剛度機(jī)構(gòu),設(shè)計了一種新型的柔性鉗,并采用非開關(guān)變結(jié)構(gòu)控制算法克服滯后效應(yīng)。
顯然,如果能利用恒力柔順機(jī)構(gòu)對果蔬采摘機(jī)器人的末端采摘夾持器進(jìn)行合理設(shè)計,在保持對果實可靠夾持的同時將夾持力控制在一定范圍,則既可以降低末端夾持裝置的復(fù)雜度,也能減少甚至避免對果實的夾持損傷。但現(xiàn)有的柔順恒力機(jī)構(gòu)往往存在恒力區(qū)間相對機(jī)構(gòu)尺寸小的缺陷,難以應(yīng)用在果實采摘等要求結(jié)構(gòu)設(shè)計緊湊的場合。為此,本文針對果實柔順夾持問題,在末端執(zhí)行器的驅(qū)動機(jī)構(gòu)和夾鉗之間設(shè)置柔順屈曲梁,并結(jié)合打靶法、遺傳算法計算求解柔順機(jī)構(gòu)的數(shù)學(xué)模型,利用序列二次規(guī)劃法設(shè)計優(yōu)化柔順機(jī)構(gòu)的相關(guān)參數(shù),使末端執(zhí)行器在一定位移輸入范圍內(nèi)具有恒力輸出特性,并可根據(jù)夾持力大小調(diào)整,從而實現(xiàn)對果實的恒力夾持。
1 柔順夾持機(jī)構(gòu)設(shè)計與分析
1.1 采摘夾持器柔順設(shè)計
末端執(zhí)行器按手爪個數(shù)可分為2指和多指型,用于蘋果等球狀果實的夾持器通常為弧形二指或三指結(jié)構(gòu)[8,22-23],夾持手指采用弧面結(jié)構(gòu)以增大和果實的接觸面積、減少損傷。這種夾持器一般使用電動或氣動裝置驅(qū)動手指抓取果實,手指弧面上安裝有壓力傳感器獲取夾持力反饋,用以調(diào)節(jié)位移輸入。
以二指式末端執(zhí)行器為例,圖1為二指式果實夾持末端執(zhí)行器模型。當(dāng)二指機(jī)構(gòu)與果實接觸時,假定2指相對平行,則果實每側(cè)所受擠壓合力方向與該側(cè)機(jī)械手指的位移輸入方向相同,如圖1a所示。如果在驅(qū)動機(jī)構(gòu)和弧面手指之間設(shè)置屈曲梁或類似柔順機(jī)構(gòu),當(dāng)柔順機(jī)構(gòu)的形狀滿足特定條件時,在一定位移輸入范圍內(nèi)柔順機(jī)構(gòu)變形,產(chǎn)生類似“超彈性”效果,使弧面手指保持恒力夾持,如圖1b所示。

注:Fin為輸入力,N;yin為位移輸入,cm;L1、L2分別為2段梁的長度,cm;t為柔順梁寬度,cm;w為柔順梁厚度,cm;n1、n2、n3為柔順梁節(jié)點,下同
由于結(jié)構(gòu)的對稱性,取一側(cè)柔順機(jī)構(gòu)進(jìn)行計算,如圖1c所示。柔順機(jī)構(gòu)由長為1和2的2段柔順梁組成,記為梁1和梁2,每段柔順梁均具有矩形橫截面,其中梁厚度為,寬度為以點1為坐標(biāo)原點保持不動,點3處有豎直方向的位移量in。
圖2為柔順梁的大撓度變形模型,未變形的柔順梁由形狀函數(shù)()描述[24],其中∈[0,1],是沿中性軸的無量綱弧長,表示柔順梁相對軸的傾斜角度,rad。當(dāng)受到外部負(fù)載時,偏轉(zhuǎn)梁由另一個函數(shù)()表示,rad。柔順梁受到的和方向的外力分別表示為F和F,N。中性軸上的任意點(,)表示為:
式中(0),(0)表示無量綱弧長=0時的坐標(biāo),cm;為梁的長度,cm。
注:F和F分別為和方向的支反力,N;∈[0,1],是沿中性軸的無量綱弧長;()表示未變形梁和軸的夾角,rad。()表示變形梁和軸的夾角,rad。
Note:FandFare reaction forces in theanddirections respectively, N;∈[0,1] is the dimensionless arc length along the neutral axis;() represents the angle between the undeformed beam and the-axis, rad;() represents the angle between the deformed beam and the-axis, rad.
圖2 柔順梁的大撓度非線性變形模型
Fig.2 Nonlinear large deformation model of compliant beam
將未變形梁的形狀函數(shù)利用多項式進(jìn)行參數(shù)化處理,如式(2)所示。

其中系數(shù)c0~c表征第段梁的形狀,將其描述為+1次多項式曲線。
根據(jù)文獻(xiàn)[25],柔順梁的控制方程為:

式中為梁的抗彎剛度,其中是彈性模量,MPa;截面慣性矩=312,cm4;和分別等于F和F,N。
梁上的應(yīng)力(MPa)如式(4)所示。

1.2 柔順梁變形模型的打靶法求解
以無量綱弧長為自變量,由式(1)、式(3)可得到控制梁變形的常微分方程組為:

式中下標(biāo)=1,2分別表示圖1c中長度為1和2的2段梁。根據(jù)梁的力平衡、力矩平衡、轉(zhuǎn)角連續(xù)和幾何約束等條件,式(5)須滿足以下初始條件和邊界條件:
1)在點1處:

2)在點2處:

3)在點3處:

取梁形狀參數(shù)中=2,此時梁形狀曲線為三次多項式曲線,已能保證梁形狀的多樣性。當(dāng)梁的控制參數(shù)10,11,12,20,21,22,1,2確定時,記未知初值1¢(0)為,整理得初值條件為


終值條件為

式(5)、(9)~(11)組成的非線性二階常微分方程組中含2個未知參數(shù)、和1個未知初值,其終值處有3個邊界條件,故可求解。本文采用打靶法[26]將邊值問題轉(zhuǎn)換為初值問題求解該微分方程組。為保證初值問題的求解精度,使用Matlab中的ode45函數(shù)[27],即變步長的龍格庫塔法求解。將求解的結(jié)果終值與式(11)聯(lián)立得到三元非線性方程組。
該三元非線性方程組的求解需要給出適當(dāng)?shù)某踔担駝t容易陷入局部收斂。為此本文將此方程組的求解視作優(yōu)化問題,首先使用具有全局優(yōu)化能力的遺傳算法[28]得到一組可行解,并將該組解作為初值,代入到Matlab的fsolve函數(shù),最終得到方程組的解。
方程組的解中等于y,為節(jié)點3在位移至in處時該點沿位移輸入方向的支反力。將求得的解代入初值問題過程量中,得到、、¢,進(jìn)而得到位移輸入下柔順梁的形狀和梁上應(yīng)力。柔順梁模型的求解過程如下:
1)給定梁優(yōu)化的初值1、2、1、2。
2)通過ode45函數(shù)建立三元非線性方程組。
3)通過fsolve函數(shù)結(jié)合遺傳算法求解步驟2)中的非線性方程組得到未知參數(shù)、和未知初值。
4)將步驟3)中的解代入ode45函數(shù)數(shù)值求解每一步的函數(shù)值得到¢。
5)以¢建立1.3節(jié)中優(yōu)化的目標(biāo)和約束。
6)在優(yōu)化過程中重復(fù)步驟1)~4),直至達(dá)到局部最優(yōu)的1、2、1、2值,即最優(yōu)柔順梁模型。
1.3 柔順梁模型優(yōu)化
由式(1)~(2)可知,柔順梁模型的控制參數(shù)為10,11,12,20,21,22,1,2,為使一定位移輸入內(nèi)的輸出力F保持恒定,使和這2個位移輸入下的輸出力盡量接近,定義函數(shù)()表示輸出力和位移輸入的關(guān)系,則柔順梁的優(yōu)化模型可定義如下:

其中n1,n1,n3,n3分別為節(jié)點1和3的坐標(biāo),1,1,2,2分別為2段梁各點坐標(biāo),在梁模型求解步驟4)求得,cm。固定節(jié)點位置可以控制梁的設(shè)計邊界和坐標(biāo)取值范圍,確保2段梁保持在一定邊界內(nèi),防止2段梁互相交叉。限制2段梁的長度1和2,可以防止梁發(fā)生自身交叉。上述變量的約束如圖1c中的虛線框所示,可根據(jù)柔順梁在末端執(zhí)行器上的尺寸調(diào)整。位移輸入為時的應(yīng)力c由式(4)求得,用于限制最大變形時梁的最大應(yīng)力不超過許用應(yīng)力,y是屈服應(yīng)力,MPa。SF是安全系數(shù)。
式(13)為模型的約束條件,以保證優(yōu)化后的柔順梁形狀能夠滿足末端執(zhí)行器大小需求。梁模型優(yōu)化為非線性最優(yōu)化問題,采用序列二次規(guī)劃法(SQP,sequence quadratic program)[29]求解。但SQP為局部最優(yōu)化算法,其初值的選取會影響最終優(yōu)化結(jié)果,故此首先需要根據(jù)柔順機(jī)構(gòu)特點定義梁的相對合理的初始形狀,再利用SQP算法進(jìn)行優(yōu)化。
2 柔順梁優(yōu)化與試驗
2.1 柔順梁模型優(yōu)化
采用前述優(yōu)化算法對蘋果夾持末端執(zhí)行器柔順梁模型進(jìn)行優(yōu)化和求解。根據(jù)柔順梁3D打印使用的聚甲醛材料和期望的恒力輸出區(qū)間,設(shè)定優(yōu)化的相關(guān)參數(shù)為:彈性模量=2.6 GPa,屈服應(yīng)力y=76 MPa,安全系數(shù)SF=1.5,=0.7 cm,=2 cm,最大允許應(yīng)力下的位移輸入=2.2 cm,梁寬度=10 mm,梁厚度=1 mm。

優(yōu)化后得到梁的形狀參數(shù)為:
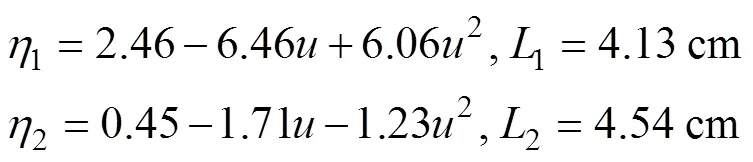
根據(jù)梁模型求解步驟4)得到優(yōu)化后柔順梁的初始形狀和受到位移輸入作用后的變形形狀,如圖3所示。柔順梁的3個節(jié)點位置和2段梁的位置受優(yōu)化模型中的約束條件限制,約束取值可按需求設(shè)置。柔順梁的最大應(yīng)力出現(xiàn)在節(jié)點1處。柔順梁存在恒力輸出段的原因如下:由圖4中梁2的變形趨勢可見梁2在位移輸入方向上的剛度(抵抗變形的能力)隨位移輸入而減小,由正剛度結(jié)構(gòu)變?yōu)樨?fù)剛度結(jié)構(gòu)。由梁1變形趨勢可見梁1始終為正剛度結(jié)構(gòu),梁1起到輔助梁2變形的作用。當(dāng)2段梁在位移輸入方向上的剛度之和接近零剛度時,將存在一段輸出力不隨位移輸入發(fā)生變化的范圍。

圖3 柔順梁變形過程圖
圖4為優(yōu)化前后柔順梁的力-位移曲線,其中()=3.911 6 N,()=3.960 5 N,并在最大位移處達(dá)到許用應(yīng)力48.1 MPa。當(dāng)夾持器夾取果實時,在0~位移范圍內(nèi)夾持力持續(xù)增加,在~范圍內(nèi)夾持力保持基本恒定,從而在不需要力反饋的條件下,實現(xiàn)了對果實的恒力柔順夾取。其恒力范圍可根據(jù)式(12)、式(13)進(jìn)行調(diào)整。相比之下,優(yōu)化前的柔順梁無“零剛度”段,夾持力隨位移輸入增大而明顯變化,無法實現(xiàn)恒力夾持。
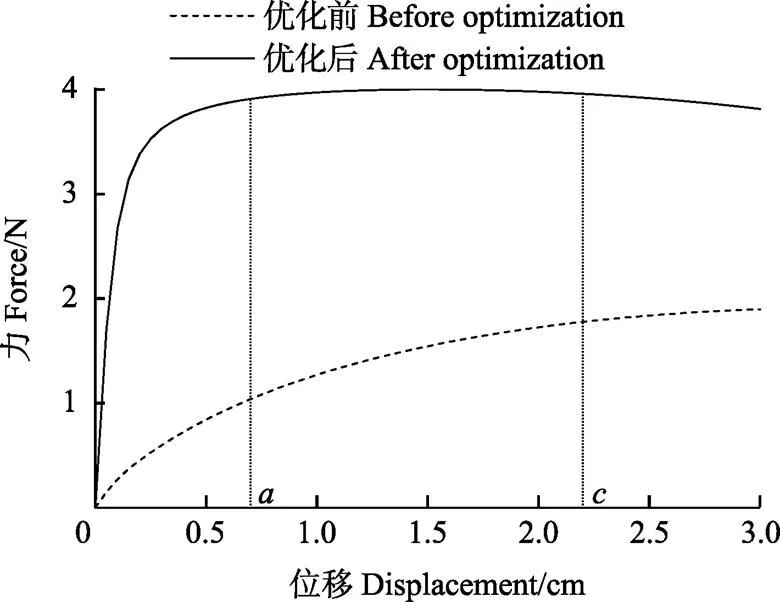
注:a~c表述優(yōu)化時設(shè)定的恒力位移區(qū)間。
此外,由圖4中~恒力段數(shù)據(jù),單側(cè)柔順梁對蘋果的夾持力約為3.95 N左右,夾持合力約為7.9 N,波動誤差不超過0.1 N。根據(jù)文獻(xiàn)[30]中的蘋果抓持試驗,以300 g蘋果為例,與夾持指摩擦系數(shù)為0.5時穩(wěn)定抓取的力不小于3 N,當(dāng)夾持力超過20 N(生物屈服力)后蘋果的內(nèi)部組織將受到損傷,本文的優(yōu)化結(jié)果滿足蘋果無損穩(wěn)定采摘要求。當(dāng)需要調(diào)整恒力大小時,不改變梁優(yōu)化形狀即可實現(xiàn),由式(3)知相同位移輸入下的支反力大小與抗彎剛度正相關(guān)。通過改變梁厚度或?qū)挾瓤墒沽壕哂胁煌目箯潉偠龋瑥亩{(diào)整優(yōu)化后柔順梁提供的恒力大小,使其適應(yīng)不同種類果實的無損采摘需求。需要注意的是,梁厚度將影響梁受到的應(yīng)力,當(dāng)取較大值時,相同載荷下的應(yīng)力增大,將限制柔順機(jī)構(gòu)的操作范圍。
2.2 柔順梁力-位移特性仿真與試驗
為驗證本文方法的正確性,分別利用非線性有限元仿真和柔順梁力-位移特性試驗對上述結(jié)果進(jìn)行對比驗證。為了加工方便和便于觀察試驗效果,對恒力結(jié)構(gòu)進(jìn)行了適當(dāng)放大。實際使用時,一方面可結(jié)合連桿機(jī)構(gòu)將柔順梁設(shè)置在合理位置而不是夾鉗上,另一方面可以將恒力結(jié)構(gòu)的尺寸和恒力范圍縮小,通過機(jī)構(gòu)并聯(lián)的方式實現(xiàn)期望的輸出特性,從而大大減小結(jié)構(gòu)尺寸。
試驗裝置如圖5所示,柔順梁形狀參數(shù)與文中優(yōu)化結(jié)果相同,使用聚甲醛材料通過3D打印加工而成,其彈性模量和屈服應(yīng)力與優(yōu)化時的材料參數(shù)設(shè)置一致。位移輸入裝置為步進(jìn)電機(jī)驅(qū)動的線軌滑臺模組(盛斯達(dá)T6/4-200 mm,精度0.1 mm,水平最大負(fù)載2.5 kg)。裝置中柔順梁、絲桿導(dǎo)軌和數(shù)顯百分表(型號為BFQ-350A,量程50.8 mm、精度±0.02 mm)均固定,載物平臺在步進(jìn)電機(jī)驅(qū)動下在絲桿導(dǎo)軌上移動并通過拉壓力傳感器(型號為JLBS-M2-3KG,量程3 kg,精度0.05%)對柔順梁施加位移輸入,力傳感器測量作用力數(shù)值,數(shù)顯百分表測量位移數(shù)值,力與位移一一對應(yīng)得到力-位移曲線。
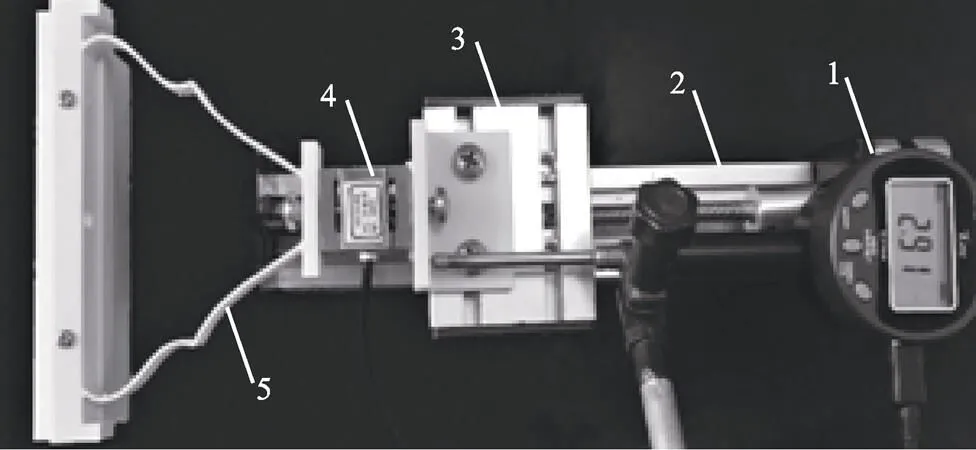
1. 數(shù)字百分表 2. 絲杠導(dǎo)軌 3. 載物平臺 4. 力傳感器 5. 柔順梁
非線性有限元仿真在有限元分析軟件Abaqus中進(jìn)行,以柔順梁優(yōu)化結(jié)果的形狀建立梁單元模型,設(shè)定彈性模量為2.6 GPa(與優(yōu)化參數(shù)相同),邊界條件如圖1c所示(1固支,3設(shè)置位移輸入且限制其他方向自由度),并劃分為866個網(wǎng)格單元,記錄3位移輸入和1相應(yīng)的支反力。
圖6為Abaqus仿真結(jié)果中位移輸入為2.2 cm時梁的應(yīng)力云圖,其中最大應(yīng)力47.87 MPa,與本文算法的實際計算結(jié)果48.10 MPa誤差為-0.48%。Abaqus對梁的力-位移關(guān)系對比驗證結(jié)果如圖7所示,位移輸入范圍0.2~2.8 cm,間隔0.2 cm,共14個點。仿真結(jié)果與計算相比,支反力平均誤差為-0.007 N,平均相對誤差-0.18%,最大誤差為-0.038N,最大相對誤差-0.96%,計算結(jié)果精度較高,表明本文梁模型的計算方法理論可行。
測試試驗的位移輸入范圍0.2~2 cm,間隔0.05 cm,共37個測點。與本文模型計算結(jié)果相比,試驗測得的支反力平均誤差為0.198 N,平均相對誤差5.06%,最大誤差為0.215 N,最大相對誤差5.8%。試驗結(jié)果與計算結(jié)果大致吻合,說明本文梁模型實際可實現(xiàn)。圖中試驗結(jié)果比計算、仿真值稍大,而仿真結(jié)果、計算結(jié)果吻合,其主要原因是仿真分析和計算的理論模型只考慮了中性軸的變形,而實際中存在梁厚度,使得連接處的剛性比理論模型稍大,同時也存在打印加工誤差和材料彈性模量誤差,使試驗結(jié)果相對理論分析值產(chǎn)生偏差。

圖6 位移輸入為2.2 cm時柔順梁應(yīng)力云圖

圖7 力-位移特性驗證結(jié)果
2.3 蘋果抓取試驗
采用文中機(jī)構(gòu)對蘋果進(jìn)行柔順夾持,夾持試驗裝置如圖8所示,力傳感器與驗證試驗相同。夾持指Ⅰ固定不動,夾持指Ⅱ通過力傳感器安裝在載物平臺上。在步進(jìn)電機(jī)驅(qū)動下,載物平臺在絲桿導(dǎo)軌上移動,帶動夾持指Ⅱ與夾持指Ⅰ合攏夾緊蘋果,載荷大小由力傳感器讀取。
以1次抓取試驗為例,圖9為抓取蘋果時柔順梁夾持力隨時間變化曲線,將載荷開始增大的時間記為0時刻。從夾持指Ⅰ開始接觸蘋果時載荷開始迅速增大,當(dāng)夾持力大約達(dá)到8 N時進(jìn)入柔順梁的恒力范圍;隨時間增加,步進(jìn)電機(jī)繼續(xù)驅(qū)動夾持指夾緊,夾持力基本穩(wěn)定。取夾持力穩(wěn)定段4~7 s共150個數(shù)據(jù)點進(jìn)行分析,得到支反力波動范圍為7.46~8.42 N,平均支反力為8.03 N,與模型計算值的誤差為1.6%,與力-位移驗證試驗結(jié)果的誤差為-0.84%。由此可見,實際蘋果夾持時雖然夾持力有一定波動,但夾持恒力與計算結(jié)果基本相符。

1. 絲杠導(dǎo)軌 2. 載物平臺 3. 力傳感器 4. 夾持指Ⅱ 5. 夾持指Ⅰ
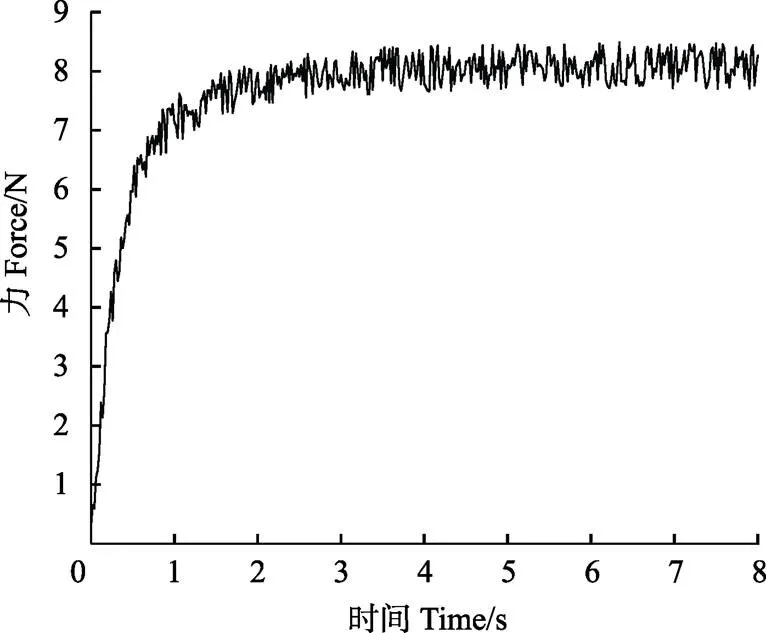
圖9 蘋果抓取試驗夾持力
為進(jìn)一步驗證夾持機(jī)構(gòu)的柔順性,選取大小相近、表面完好的20個蘋果進(jìn)行抓取試驗,夾持持續(xù)時間為 10 s,均沒有發(fā)生滑落現(xiàn)象。將蘋果靜置24 h,人工觀察蘋果表皮只有1個蘋果表面出現(xiàn)壞點抓取完好率為95%。由于夾持力未達(dá)到蘋果的生物屈服力,該蘋果內(nèi)部未發(fā)生損傷,其表面損傷的原因可能是由于表面與夾持指不貼合,導(dǎo)致局部壓強(qiáng)較大。
3 結(jié) 論
1)針對果蔬采摘機(jī)器人無損采摘需求,通過在末端執(zhí)行器上設(shè)置柔順機(jī)構(gòu),并對柔順機(jī)構(gòu)的力學(xué)性能進(jìn)行優(yōu)化計算,獲取果實無損采摘所需的柔順恒力特性。
2)建立柔順梁的變形控制微分方程組,采用打靶法將邊值問題重新描述為初值問題,并結(jié)合遺傳算法優(yōu)化求解初值。在此基礎(chǔ)上,采用序列二次規(guī)劃法優(yōu)化計算梁的形狀函數(shù),使柔順梁對蘋果的恒定夾持力維持在7.9 N左右。
3)分別進(jìn)行非線性有限元仿真和柔順梁力-位移特性試驗,仿真與模型計算結(jié)果相符,試驗與模型計算結(jié)果平均誤差為5.06%。進(jìn)行蘋果抓取試驗,夾持力波動為7.46~8.42 N,平均恒定夾持力約為8.03 N,滿足蘋果無損夾持需求。
4)多次蘋果夾持試驗的抓取完好率為95%,驗證了該柔順機(jī)構(gòu)無損夾持蘋果的可行性。通過適當(dāng)調(diào)整柔順梁的參數(shù),本文算法可適應(yīng)不同類型果實的恒力夾持需求,可為柔順機(jī)構(gòu)在果蔬無損夾持采摘中的有效應(yīng)用提供參考。
[1] 宋健,張鐵中,徐麗明,等. 果蔬采摘機(jī)器人研究進(jìn)展與展望[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2006,37(5):158-162. Song Jian, Zhang Tiezhong, Xu Liming, et al. Research actuality and prospect of picking robot for fruits and vegetables[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(5): 158-162. (in Chinese with English abstract)
[2] Liu F, Ji W, Tang W, et al. Research on grasping planning for apple picking robot’s end-effector[C]//Proceedings of the 2015 Chinese Intelligent Systems Conference. Berlin Heidelberg: Springer, 2016: 95-103.
[3] Bac C W, Hemming J, Van Tuijl J, et al. Performance evaluation of a harvesting robot for sweet pepper[J]. Journal of Field Robotics, 2017, 34(6): 1123-1139.
[4] 徐麗明,劉旭東,張凱良,等. 臍橙采摘機(jī)器人末端執(zhí)行器設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2018,34(12):53-61. Xu Liming, Liu Xudong, Zhang Kailiang, et al. Design and test of end-effector for navel orange picking robot [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 53-61. (in Chinese with English abstract)
[5] 傅隆生,張發(fā)年,槐島芳德,等. 獼猴桃采摘機(jī)器人末端執(zhí)行器設(shè)計與試驗[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2015,46(3):1-8. Fu Longsheng, Zhang Fanian, Yoshinori G, et al. Development and experiment of end-effector for kiwifruit harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 1-8. (in Chinese with English abstract)
[6] Chiu Y C, Yang P Y, Chen S. Development of the end-effector of a picking robot for greenhouse-grown tomatoes[J]. Applied Engineering in Agriculture, 2013, 29(6): 1001-1009.
[7] Kondo N, Yamamoto K, Shimizu H, et al. A machine vision system for tomato cluster harvesting robot[J]. Engineering in Agriculture Environment & Food, 2009, 2(2): 60-65.
[8] 王學(xué)林,姬長英,周俊,等. 基于灰色預(yù)測控制的果蔬抓取系統(tǒng)設(shè)計與試驗[J]. 農(nóng)業(yè)工程學(xué)報,2010,26(3):112-117. Wang Xuelin, Ji Changying, Zhou Jun, et al. Design and experiment of fruit and vegetable grasping system based on grey prediction control[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(3): 112-117. (in Chinese with English abstract)
[9] 周俊,楊肖蓉,朱樹平. 基于自適應(yīng)神經(jīng)模糊網(wǎng)絡(luò)的果蔬抓取力控制[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2014,45(7):67-72. Zhou Jun, Yang Xiaorong, Zhu Shuping. Fruit and vegetable grasping force control based on adaptive neural fuzzy network[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(7): 67-72. (in Chinese with English abstract)
[10] Dimeas F, Sako D V. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting[J]. Robotica, 2015, 33(5): 1085-1098.
[11] 章軍. 六關(guān)節(jié)三指蘋果抓取機(jī)械手的自適應(yīng)柔性分析[J]. 農(nóng)業(yè)工程學(xué)報,2010,26(1):140-144. Zhang Jun. Analysis of adaptive flexibility of three-finger manipulator with six-joint for grasping apple[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(1): 140-144. (in Chinese with English abstract)
[12] Ling M , Cao J , Jiang Z , et al. Development of a multistage compliant mechanism with new boundary constraint[J]. Review of Scientific Instruments, 2018, 89(1): 015009.
[13] Zhang X, Zhu B. Topology optimization of compliant mechanisms[M]. Singapore: Springer Singapore. 2018.
[14] Li Y, Chen Y, Yang Y, et al. Passive particle jamming and its stiffening of soft robotic grippers[J]. IEEE Transactions on Robotics, 2017, 33(2): 446-455.
[15] 張愛梅. 平面梁大撓度非線性問題的完備解與柔順機(jī)構(gòu)精確建模[D]. 西安:西安電子科技大學(xué),2013. Zhang Aimei. Comprehensive Solution to Nonlinear Large-Deflection Problems of Planar Beams and Accurate Modeling of Compliant Mechanisms[D]. Xi’an: Xidian University, 2013. (in Chinese with English abstract)
[16] 李庚. 空間大撓度梁的變形計算及其在空間柔順機(jī)構(gòu)建模中的應(yīng)用[D]. 西安:西安電子科技大學(xué),2016. LI Geng. Deformation Calculation of Spatial Large Deflection Beam and its Application on the Modeling of Spatial Compliant Mechanisms[D]. Xi’an: Xidian University, 2016. (in Chinese with English abstract)
[17] 張贏斌. 拓?fù)鋬?yōu)化法設(shè)計柔順恒力機(jī)構(gòu)[D]. 西安:西安電子科技大學(xué),2012. Zhang Yingbin. Design Compliant Constant Force Mechanism Using Topology Optimization[D]. Xi’an: Xidian University, 2012. (in Chinese with English abstract)
[18] Merriam E G, Colton M B, Magleby S, et al. The design of a fully compliant statically balanced mechanism[C]//ASME 2013 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference. 2013, 6A(7): doi: 10.1115/DETC2013-13142
[19] Wang J Y, Lan C C. A constant-force compliant gripper for handling objects of various sizes[J]. Journal of Mechanical Design, 2014, 136(7): doi: 10.1115/1.4027285
[20] Pham H T, Wang D A. A constant-force bistable mechanism for force regulation and overload protection[J]. Mechanism & Machine Theory, 2011, 46(7): 899-909.
[21] Liu Y, Zhang Y, Xu Q. Design and control of a novel compliant constant-force gripper based on buckled fixed-guided beams[J]. IEEE/ASME Transactions on Mechatronics, 2016, 22(1): 476-486.
[22] 姬偉,李俊樂,楊俊,等. 機(jī)器手采摘蘋果抓取損傷機(jī) 理有限元分析及驗證[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(5): 17-22. Ji Wei, Li Junle, Yang Jun, et al. Analysis and validation for mechanical damage of apple by gripper in harvesting robot based on finite element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(5): 17-22. (in Chinese with English abstract)
[23] 姬偉,羅大偉,李俊樂,等. 果蔬采摘機(jī)器人末端執(zhí)行器的柔順抓取力控制[J]. 農(nóng)業(yè)工程學(xué)報,2014,30(9):19-26. Ji Wei, Luo Dawei, Li Junle, et al. Compliance grasp force control for end-effector of fruit-vegetable picking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(9): 19-26. (in Chinese with English abstract)
[24] Lan C C, Wang J H, Chen Y H. A compliant constant-force mechanism for adaptive robot end-effector operations[C]// Proceedings of the IEEE International Conference on Robotics and Automation. IEEE, 2010: 2131-2136.
[25] Lan C C, Cheng Y J. Distributed shape optimization of compliant mechanisms using intrinsic functions[J]. Journal of
Mechanical Design, 2008, 130(7): 3-11.
[26] Yin X, Lee K M, Lan C C. Computational models for predicting the deflected shape of a non-uniform, flexible finger[C]//Proceeedings of the IEEE International Conference on Robotics and Automation. IEEE, 2004: 2963-2968.
[27] 薛定宇,陳陽泉. 高等應(yīng)用數(shù)學(xué)問題的MATLAB求解[M]. 北京:清華大學(xué)出版社,2004.
[28] John H. Mathews, Kurtis D Fink. 數(shù)值方法(MATLAB版)[M]. 北京:電子工業(yè)出版社,2005.
[29] 馬昌鳳. 最優(yōu)化方法及其Matlab程序設(shè)計[M]. 北京:科學(xué)出版社,2010.
[30] 唐偉. 蘋果采摘機(jī)器人末端執(zhí)行器無損主動抓取技術(shù)研究[D]. 鎮(zhèn)江:江蘇大學(xué),2017. Tang Wei. Research on Non-destructive and Active Grasp Technology for End-Effector of Apple Picking Robot[D]. Zhenjiang: Jiangsu University, 2017. (in Chinese with English abstract)
Development of compliant constant-force mechanism for end effector of apple picking robot
Miao Yubin, Zheng Jiafeng
(,,200240,)
In order to reduce the damage caused by end effector of picking robot during fruit clamping process, non-destructive fruit picking has gradually become a key technology of fruit harvesters. The application of compliant constant-force mechanism may enable a constant output force within a certain range of operating displacement. The existing compliant constant force mechanism has the defect that the constant force interval is small relative to the size of the mechanism, which makes it difficult to apply in the situations requiring compact structure design such as fruit picking. In this paper, a method to generate compliant constant-force mechanism is introduced. Firstly, based on the shape function, a set of nonlinear ordinary differential equations for buckling deformation of compliant beams under boundary conditions is established. Secondly, the boundary value problem is redescribed as the initial value problem by applying the shooting method combined with the Runge-kutta method, the 3D nonlinear equations are obtained according to three boundary conditions, two unknown variables and one unknown initial value. Thirdly, the nonlinear equations is solved as an optimization problem. To avoid the optimization problem falling into local convergence, the genetic algorithm is employed to globally find the appropriate initial values of the three unknowns in the nonlinear equations, the solution of the differential equations is obtained according to the principle of the shooting method. Finally, the sequential quadratic programming method is implemented to optimize the parameters of the shape function, the optimization objective is to achieve a constant output force within a certain range of displacement input, and the constraints are the design boundary and the maximum permissible stress of the beams. A two-finger apple picking end effector is taken as an example, the initial shape parameters of the compliant mechanism are set and the algorithm is realized in Matlab. After optimization, the constant clamping force of the compliant beam to the fruit is about 7.9 N. In order to verify the correctness of the method, the non-linear finite element simulation is carried out in Abaqus, and the force-displacement experiment is carried out. The simulation results agree well with calculations, compared to the calculations, the average error of force-displacement test is 5.06%, which is acceptable. The main reason for the error may be that the theoretical model only considers the deformation of the neutral axis. The apple picking test is designed to verify the practicality of the method. At constant-force range, the clamping force fluctuates from 7.46-8.42 N, and the average clamping force is about 8.03 N. The clamping force is basically consistent with the calculation results though a certain fluctuation exists. To further verify the flexibility of the clamping mechanism, 20 apples of similar size and intact surface are selected for clamping test. The result shows that the ratio of non-destructive grasping is 95%, no slipping occurred, the compliant mechanism designed can achieve stable clamping of apples. The algorithm can meet the requirements of constant force clamping for different types fruit by properly adjusting the parameters of the compliant beam. The research provides a reference for the effective application of the compliant mechanism in non-destructive fruit-picking.
robots; end effectors; design; compliant constant force mechanism; shooting method
10.11975/j.issn.1002-6819.2019.10.003
TP241
A
1002-6819(2019)-10-0019-07
2018-12-12
2019-01-15
上海市科研計劃項目(16391901700);滬農(nóng)科推字(2018)第1-2號、(2015)第4-1號;上海市工程技術(shù)研究中心建設(shè)專項(17DZ2252300)
苗玉彬,副教授,主要從事智能裝備、智能傳感器研究。Email:ybmiao@sjtu.edu.cn
苗玉彬,鄭家豐.蘋果采摘機(jī)器人末端執(zhí)行器恒力柔順機(jī)構(gòu)研制[J]. 農(nóng)業(yè)工程學(xué)報,2019,35(10):19-25. doi:10.11975/j.issn.1002-6819.2019.10.003 http://www.tcsae.org
Miao Yubin, Zheng Jiafeng. Development of compliant constant-force mechanism for end effector of apple picking robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(10): 19-25. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.10.003 http://www.tcsae.org
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00