液壓爬模施工技術在超高層建筑工程中的應用
2019-07-22 11:30:06萬瑞魏春春
中國港灣建設 2019年7期
萬瑞,魏春春
(中交一航局第四工程有限公司,天津 300456)
0 引言
在超高層豎向結構施工中,爬模技術得到了廣泛的應用。它具有操作方便、結構簡單、穩定性好、高空作業安全[1],且爬升速度快的特點;又因組裝靈活、結構適應強,即可垂直爬升,也可沿斜面爬升;爬架按其附著方式、提升方式分類也較多。采用液壓提升的方式又為爬架的同步提升提供了較為穩定的動力。
依據建筑結構的特點,設計相應的機位,配置合理的模板結構。為超高層豎向結構的施工提供較好的工作環境。
1 工程概況
中交匯通橫琴廣場主塔樓結構為鋼管混凝土框架+核心筒+伸臂桁架結構。其中核心筒結構高度為299.4 m,21F和42F設有伸臂桁架加強層。核心筒為剪力墻結構,由內、外墻組成3個筒室。具體參見圖1。外墻經過5次變截面,從1 200 mm變至600 mm;內墻經過3次變截面,從600 mm變至400 mm。
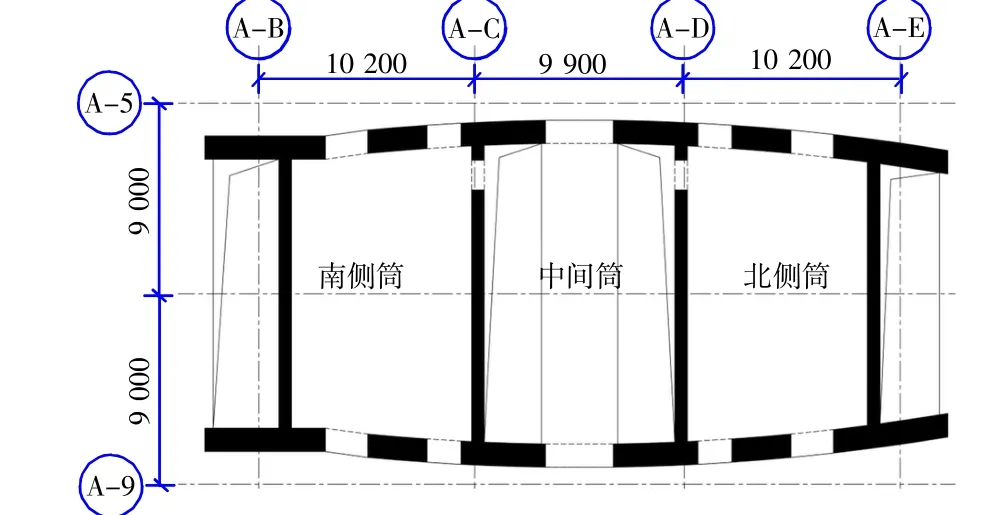
圖1 核心筒平面圖Fig.1 Planeof core tube
2 爬升模板系統簡介
在選用液壓爬模系統時,綜合考慮了核心筒的結構變化、平面形狀、混凝土布料等因素,設計了內外分區獨立的爬模體系。主要包括分布在核心筒外側、南北內筒的SKE50架體及中間筒CLIMBING80架體;各架體相互獨立,可各自單獨整體爬升[2]。此爬模系統主要由3個系統組成,分別為架體系統、爬升系統及模板系統組成[3],這3個系統相互組合成整體負責完成核心筒豎向結構的施工。
2.1 架體系統
1)架體構造
在架體設計上,考慮到工程特點并方便各專業能夠安全有序施工,共設計5層操作平臺,依次有混凝土修補平臺、液壓操作平臺、退模平臺、對拉螺桿操作平臺和鋼筋綁扎平臺組成(由下至上)。爬模架體構造如圖2。因本工程結構外沿變化較多,尤其是東西兩側墻體為弧形,因此,在每層架體之間設置平臺板連接,平臺板之間采用調節絲桿和型鋼桁架連接,通過調節絲桿可以自由伸縮,便于調整平臺板的平整度和傾斜度。
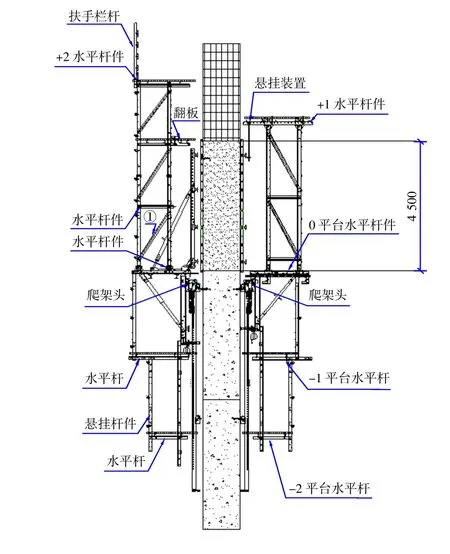
圖2 爬模架體構造圖Fig.2 Structural map of climbing formwork frame
2)爬模架體布料機平面布置
本工程2臺布料機布置在中間筒內,此處爬模架體選用CLIMBING80架體。布料機平面布置如圖3。
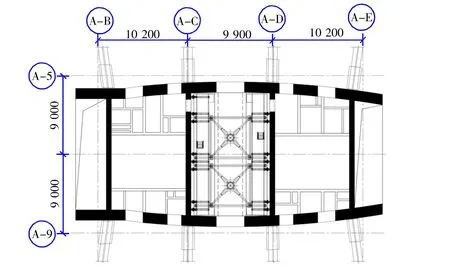
圖3 布料機平面布置圖Fig.3 Plane layout of the feeder
3)爬模架體通道布置
爬模體系各層操作平臺之間設計樓梯[4],共6處,其中電梯井筒內爬梯為下掛爬梯,通過中筒的水平結構層與施工電梯銜接,可通行至施工作業層。
2.2 機位及爬升系統
二層組裝時,內外筒共布設76個機位,根據核心筒結構變化,位于25層、46層機位做出適當調整,爬升至相應樓層時拆除多余爬模架體,共減少12個機位。
動力裝置、爬升導軌、爬升器、預埋爬錐及懸掛靴等共同組成了爬模的爬升系統[5]。采用多組液壓千斤頂作為動力裝置,通過千斤頂油缸伸縮提升導軌及架體,導軌和架體交替爬升得以完成爬模系統的爬升[6]。
2.3 模板系統
模板結構形式為鋼框木模板。鋼框圍檁采用Q235鋼板制作,面板采用厚度18 mm厚維薩建筑模板;模板尺寸依據標準層高度4 500 mm進行配置,長度根據核心筒尺寸進行深化設計。具體見圖4。
為保證結構外觀成型質量及陰角部位尺寸,結構的轉角部位專門設計了轉角模板[7-8],主要有兩種,一種是陰角模板,一種是連接角模,其長度與平面模板相匹配;門洞口側模板與連梁底模板,首層及非標準層采用木膠合板進行散拼,水平部分采用鋁合金模板體系。
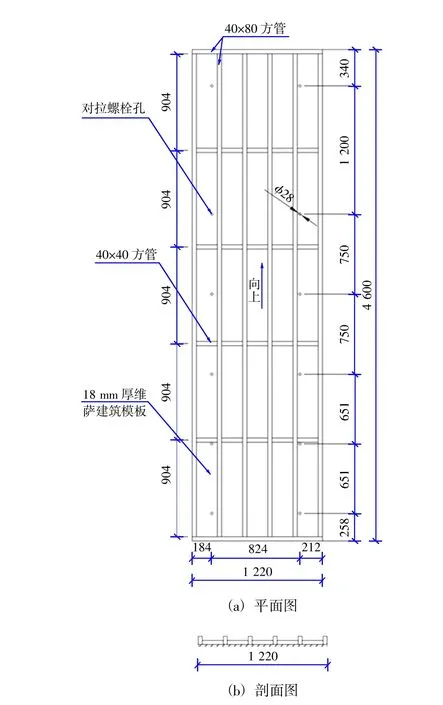
圖4 鋼框木模板尺寸圖Fig.4 Dimension figure of steel frame and wood formwork
3 爬模施工工藝
3.1 爬模安裝工藝流程
通常在施工完首層后安裝爬模體系。安裝工藝流程為:預埋爬錐寅吊裝下掛平臺寅安裝導軌寅吊裝上掛平臺寅綁扎鋼筋寅吊裝鋼框木模寅螺栓加固寅澆筑混凝土。
3.2 爬模爬升工作流程
爬模爬升工作流程如圖5。
3.3 動臂塔吊與爬模交替爬升技術
根據爬模爬升規劃,本工程爬模共爬升64次,其中21和42層加強層分別爬升2次,其余樓層各爬升1次。
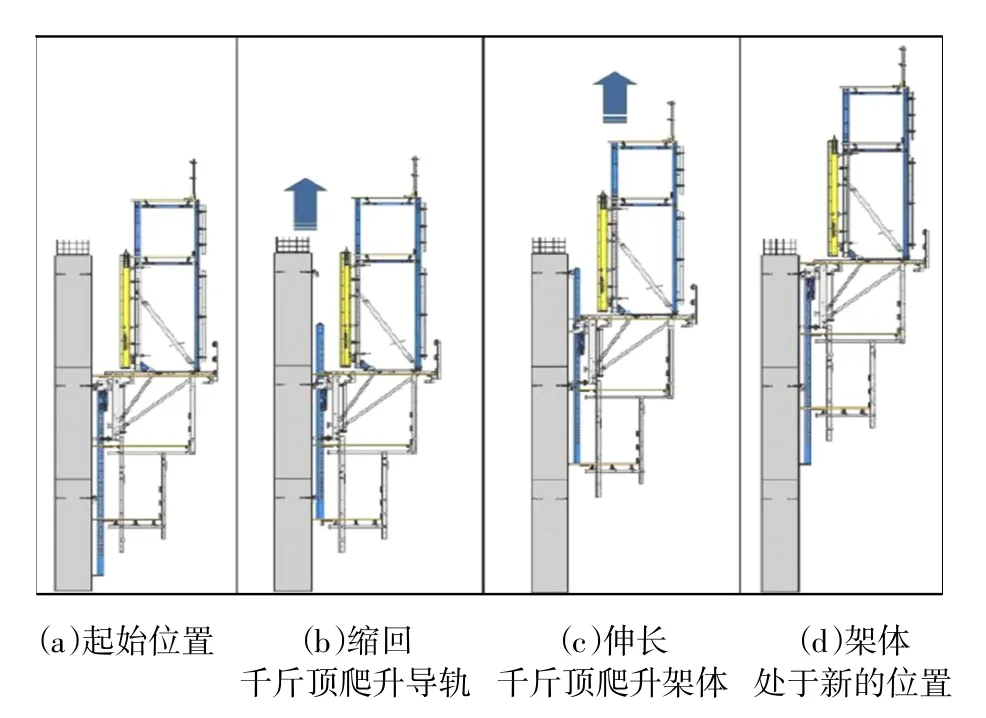
圖5 爬模爬升工作流程示意圖Fig.5 Sketch diagram of climbing work flow of climbing formwork
本工程采用2臺動臂塔吊進行作業,塔吊規劃爬升17次,爬升步距為18 m,爬模每爬升4層約18 m,根據層高變化和爬模爬升規劃,調整動臂塔吊鋼梁預埋位置,在牛腿埋件對應部位內側架體處,設置翻板平臺覆蓋,塔吊牛腿可在架體-2層平臺進行焊接。塔吊爬升時打開爬架翻板,保證爬模施工與動臂塔吊頂升互不沖突。塔吊爬升和架體爬升必須遵從塔吊優先爬升,保證架體或核心筒內鋼結構與塔吊的安全距離。動臂塔吊處翻轉平臺如圖6。
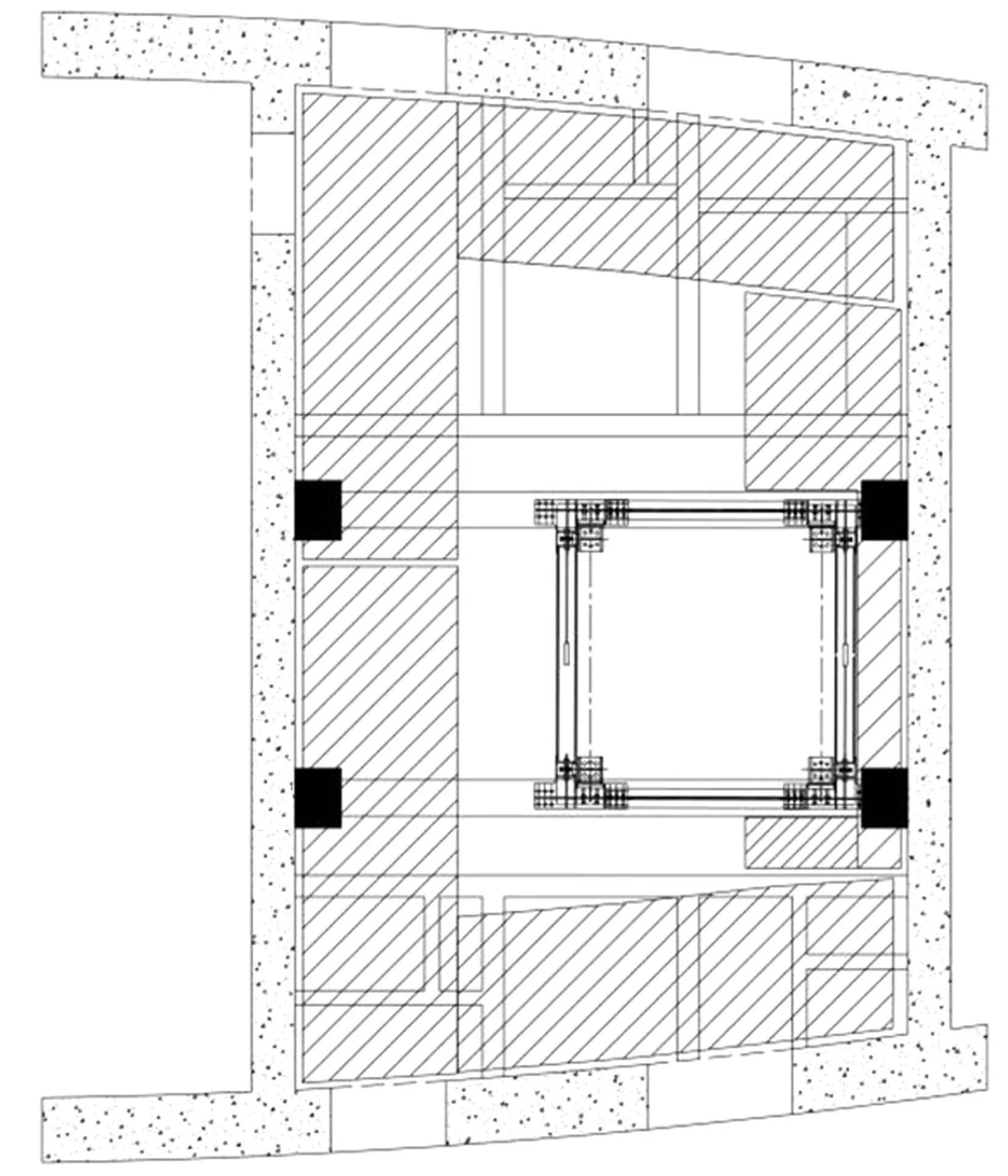
圖6 動臂塔吊處翻轉平臺示意圖FIg.6 Schematic diagram of overturning platform at lifting point of movable arm tower crane
翻轉平臺 動臂塔吊
3.4 結構變化層架體拆改技術
核心筒北側外墻體翼墻從25層由3 200 mm收縮為500 mm,南側外墻體翼墻垛從46層由3 500 mm收縮為500 mm。針對翼墻變化架體進行了局部拆改組裝。架體拆改前、后平面如圖7、圖8。
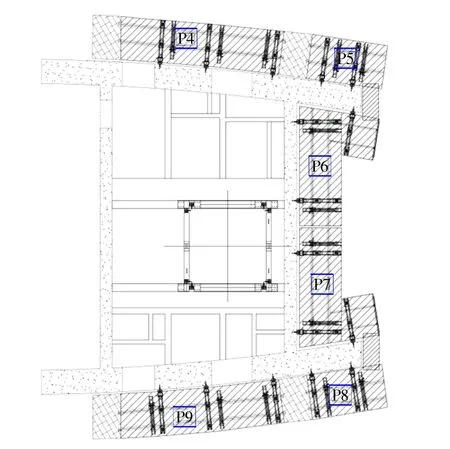
圖7 架體拆改前平面圖Fig.7 Planar view before frame body disassembly and modification
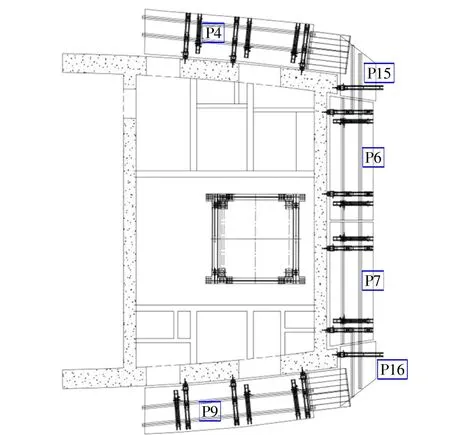
圖8 架體拆改后平面圖Fig.8 Planar view after frame body disassembly and modification
架體拆換流程為:24層墻體澆筑完成寅拆除舊架體的模板寅將拆除的架體與其它架體斷開寅其它架體爬升至25層寅拆除的架體吊裝至地面寅新架體吊裝到位寅安裝架體防護網片寅吊裝封頭鋼框木模并安裝。
將拆解后的架體材料重新拼裝成2個單獨機位的小架體。
4 結語
液壓爬模施工技術在高層建筑施工中,以其安全、快捷、方便操作等特點而應用廣泛。但因建筑結構、架體類型的不同,所遇到的問題也會各種各樣。本項目通過運用這些技術,通過本工程液壓爬模施工技術的介紹,針對結構變化和架體特點,提供了一些方法和思路,以期對類似工程提供參考。成功地解決了整體爬升技術難題,保證了工程有序推進,提高了施工效率,加快了施工進度,達到了預期的安全、質量、經濟指標,積累了寶貴經驗,為以后同類工程應用液壓爬模技術提供了一定的借鑒經驗。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
現代企業(2015年9期)2015-02-28 18:56:50
