未知量測噪聲分布下的CBMeMBer算法
2019-07-20 06:44:14胡建旺
火力與指揮控制 2019年6期
關(guān)鍵詞:實(shí)驗(yàn)
胡建旺 ,董 青 ,張 鐵 ,吉 兵
(1.陸軍工程大學(xué)石家莊校區(qū),石家莊 050003;2.北方聯(lián)創(chuàng)通信有限公司,南昌 330000)
0 引言
近年來,基于隨機(jī)有限集(Random Finite Set,RFS)[1]的目標(biāo)跟蹤技術(shù)發(fā)展迅速[2-4]。2008 年 Mahler提出了基于多伯努利隨機(jī)集的多目標(biāo)多伯努利(Multi-Target Multi-Bernoulli,MeMBer)跟蹤算法[5]。針對MeMBer會高估目標(biāo)數(shù)目的問題,Vo提出了勢均衡多目標(biāo)多伯努利(Cardinality Balanced MeMBer,CBMeMBer)濾波算法[6]。在目標(biāo)跟蹤過程中,由于電磁環(huán)境、溫度和其他因素影響,量測噪聲概率分布難以準(zhǔn)確獲取。針對此問題,部分學(xué)者基于隨機(jī)集理論,對該問題進(jìn)行了一定的研究[7-10]。
本文針對未知量測噪聲分布下的目標(biāo)跟蹤問題,引入代價參考粒子濾波(Cast Reference Particle Filter,CRPF)[11-13]思想,提出一種基于風(fēng)險評估的CBMeMBer 算 法 (Risk Evaluation CBMeMBer,RE-CBMeMBer)。算法引入風(fēng)險函數(shù)計(jì)算CBMeMBer粒子風(fēng)險值,之后對粒子風(fēng)險值進(jìn)行評估,用評估結(jié)果替代似然函數(shù),以此實(shí)現(xiàn)粒子的權(quán)值更新。仿真結(jié)果表明,本文所提算法在運(yùn)行速率,穩(wěn)定性上都優(yōu)于SMC-CBMeMBer算法。
1 SMC-CBMeMBer濾波器
根據(jù)k時刻的后驗(yàn)多目標(biāo)密度表達(dá)式可知,CBMeMBer算法的核心思想是遞推包含存在概率和后驗(yàn)概率密度的多個集合。采用粒子實(shí)現(xiàn)形式時,SMCCBMeMBer算法傳遞包含權(quán)重和粒子的集合,每個集合表示1條假設(shè)軌跡。假設(shè)k-1時刻的CBMeMBer近似為一族帶權(quán)粒子
1.1 預(yù)測

則預(yù)測項(xiàng)分別為:

1.2 更新
假定k時刻預(yù)測的多目標(biāo)密度為:


則更新項(xiàng)分別為:

其中


2 未知量測噪聲分布下的粒子CBMeMBer算法
根據(jù)式(21)可知,標(biāo)準(zhǔn) SMC-CBMeMBer算法必須在多維量測空間中計(jì)算似然函數(shù)。然而該操作存在兩點(diǎn)不足:一是針對未知復(fù)雜的量測噪聲,其概率分布通常難以獲取,而概率分布不準(zhǔn)確將嚴(yán)重影響算法性能;二是多維量測空間中進(jìn)行似然函數(shù)計(jì)算需要消耗較多的計(jì)算時間。而解決這些問題的途徑之一是避開似然函數(shù)計(jì)算。
2.1 風(fēng)險函數(shù)與評估函數(shù)
首先經(jīng)風(fēng)險函數(shù)表達(dá)式(22)計(jì)算,當(dāng)粒子與量測值距離較近時,賦予該粒子較小的風(fēng)險值,反之,則賦予較大風(fēng)險值。



為驗(yàn)證指數(shù)函數(shù)作為粒子質(zhì)量評估函數(shù)的有效性,采用式(24)對似然函數(shù)和評估函數(shù)對粒子分辨能力進(jìn)行對比。式中,σ(0,ε)表示以 0為中心,半徑為 ε 的鄰域,ε表示評估函數(shù)與似然函數(shù)對粒子分辨能力的接近程度。實(shí)驗(yàn)得出,在量測噪聲分布為N(0,1),=1時,風(fēng)險評估函數(shù)與似然函數(shù)對粒子的分辨能力差別為ε=0.002 5,分辨能力相當(dāng)。
此外,由于真實(shí)場景下,噪聲環(huán)境并非固定不變,因此,評估函數(shù)參數(shù)的取值也應(yīng)不同。目前理論推導(dǎo)參數(shù)的取值比較困難,只能根據(jù)經(jīng)驗(yàn)確定的取值區(qū)間。實(shí)驗(yàn)結(jié)果表明,在不同的量測噪聲環(huán)境中,參數(shù)的取值與噪聲大小成反比。參數(shù)的經(jīng)驗(yàn)取值區(qū)間為:噪聲較小時,∈[1.2,1.4];噪聲適中時∈[0.9,1.1];噪聲較大時,∈[0.6,0.8]。
從原理上看,風(fēng)險評估函數(shù)的作用等同于似然函數(shù),即都是用來評估粒子質(zhì)量,但風(fēng)險評估函數(shù)不需要知道量測噪聲分布情況,只需在一維量測空間中計(jì)算新息范數(shù)和指數(shù)函數(shù),一定程度上克服了狀態(tài)估計(jì)對粒子的依賴。
2.2 RE-CBMeMBer濾波算法
1)預(yù)測
根據(jù)重要性采樣函數(shù)抽取粒子并進(jìn)行粒子預(yù)測,并通過式(5)~式(8)計(jì)算粒子權(quán)值得到
2)風(fēng)險計(jì)算和評估
利用式(22)計(jì)算粒子風(fēng)險值,并將粒子風(fēng)險值代入式(23)對粒子風(fēng)險進(jìn)行評估。
3)粒子更新
利用式(17)、式(18)分別計(jì)算漏檢和量測更新的目標(biāo)的粒子權(quán)值,并進(jìn)行歸一化處理;利用式(11)、式(13)計(jì)算假設(shè)軌跡的存在概率,得到更新的多伯努利隨機(jī)集為
4)軌跡修剪、重采樣和狀態(tài)提取。
3 仿真實(shí)驗(yàn)
3.1 仿真參數(shù)設(shè)置
本文仿真場景設(shè)置為:仿真時間為80 s;仿真步長為 1 s;觀測區(qū)域?yàn)?x-y二維平面區(qū)域[-2π,2π]*[0,2 000 m]。先后出現(xiàn)6個做轉(zhuǎn)彎運(yùn)動(CT)的目標(biāo)。狀態(tài)方程和量測方程分別為:


3.2 算法性能分析
本仿真中目標(biāo)的真實(shí)軌跡如圖1所示,其中圓圈○表示目標(biāo)軌跡起點(diǎn),三角形△表示目標(biāo)軌跡終結(jié)。
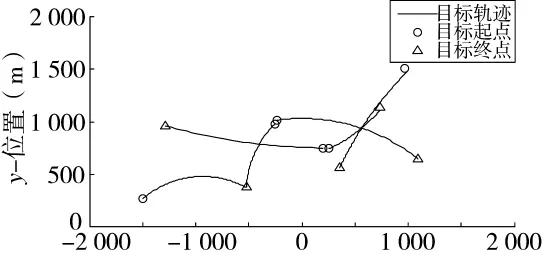
圖1 目標(biāo)實(shí)際軌跡圖
1)仿真實(shí)驗(yàn)1:量測噪聲先驗(yàn)已知,且為高斯分布
當(dāng)量測噪聲為高斯分布且分布已知。假設(shè)量測噪聲實(shí)際概率分布為 wk~N(0,R0),其中

仿真實(shí)驗(yàn)1中,假設(shè)SMC-CBMeMBer算法掌握的量測噪聲概率分布為N(0,R),其中R=R0。圖2給出了SMC-CBMeMBer算法和改進(jìn)算法的跟蹤軌跡圖。從圖2可以看出,在量測噪聲先驗(yàn)已知的情況下,SMC-CBMeMBer和RE-CBMeMBer算法都能較為精確地跟蹤到所有目標(biāo),且跟蹤精度相差不大。
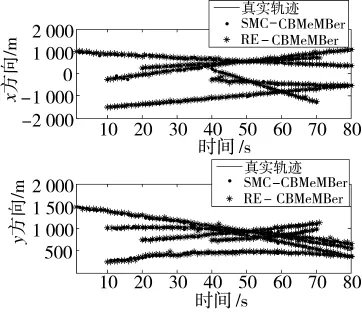
圖2 仿真實(shí)驗(yàn)1的多目標(biāo)跟蹤軌跡圖

圖3 仿真實(shí)驗(yàn)1的目標(biāo)數(shù)目估計(jì)
圖3 表示真實(shí)目標(biāo)數(shù)目和兩種跟蹤算法對目標(biāo)數(shù)目估計(jì)結(jié)果。可知當(dāng)量測噪聲先驗(yàn)分布與真實(shí)分布匹配時,兩種算法對目標(biāo)數(shù)目的估計(jì)能力相當(dāng)。
為充分比較兩種算法的跟蹤性能,本仿真實(shí)驗(yàn)采用OSPA距離來評定兩種算法的跟蹤誤差。由圖4可知,兩種算法誤差距離相當(dāng)。由于算法具有隨機(jī)性,單次濾波結(jié)果具有差異性,因此,通過100次蒙特卡洛仿真,從統(tǒng)計(jì)意義上比較算法平均運(yùn)行時間t和平均OSPA距離d。

圖4 OSPA距離

表1 兩種算法平均運(yùn)行時間和OSPA距離比較
由表1可知,兩種算法跟蹤精度相當(dāng),但由于RE-CBMeMBer算法在粒子更新時,避開多維空間中似然函數(shù)的求解,RE-CBMeMBer的運(yùn)行時間近似為SMC-CBMeMBer運(yùn)行時間的。
2)仿真實(shí)驗(yàn)2:量測噪聲先驗(yàn)未知,且為伽馬分布
由于真實(shí)環(huán)境下噪聲分布常為非高斯形式,因此,仿真實(shí)驗(yàn)2在非高斯量測噪聲環(huán)境下對SMC-CBMeMBer和RE-CBMeMBer算法性能進(jìn)行比較。假設(shè)實(shí)際量測噪聲分布為伽馬分布:。假設(shè)SMC-CBMeMBer算法獲得的量測噪聲的先驗(yàn)分布為N(0,R1),其中,R1=diag(0.1,0.5)。
下頁圖5為多目標(biāo)跟蹤軌跡圖,可知SMC-CBMeMBer算法僅在前幾個時刻跟蹤到目標(biāo),這是由于量測噪聲的先驗(yàn)分布與實(shí)際分布不匹配,誤差迅速累積,導(dǎo)致目標(biāo)丟失。相比而言,RE-CBMeMBer算法能較好地跟蹤目標(biāo),具有較好的穩(wěn)定性和魯棒性。

圖5 仿真實(shí)驗(yàn)2的多目標(biāo)跟蹤軌跡圖
從圖6可知,SMC-CBMeMBer濾波算法僅在前6個時刻準(zhǔn)確估計(jì)到目標(biāo)數(shù)目,其余時刻均產(chǎn)生錯誤估計(jì),而RE-CBMeMBer濾波算法除個別時刻估計(jì)錯誤之外,大部分時刻均做到準(zhǔn)確估計(jì)目標(biāo)數(shù)目。經(jīng)過50次蒙特卡洛仿真,采用多次仿真中算法的發(fā)散次數(shù)來衡量算法穩(wěn)定性,結(jié)果顯示,SMC-CBMeMBer濾波算法總共發(fā)散 36次,而RE-CBMeMBer濾波算法未發(fā)散。

圖6 仿真實(shí)驗(yàn)2的目標(biāo)數(shù)目估計(jì)
實(shí)驗(yàn)結(jié)果表明:當(dāng)量測噪聲先驗(yàn)分布與真實(shí)分布不匹配時,SMC-CBMeMBer濾波算法穩(wěn)定性難以保證,由于RE-CBMeMBer濾波算法不依賴于量測噪聲的先驗(yàn)分布,因此,具有更高的穩(wěn)定性。
4 結(jié)論
本文提出了一種能在量測噪聲分布未知的情況下進(jìn)行多目標(biāo)跟蹤算法,與傳統(tǒng)的SMC-CBMeMBer濾波算法相比,該算法不依賴于量測噪聲先驗(yàn)分布,能在未知且復(fù)雜的量測噪聲分布環(huán)境下進(jìn)行多目標(biāo)跟蹤,此外該算法避免了在多維量測空間計(jì)算似然函數(shù),與SMC-CBMeMBer算法相比,節(jié)省了近40%的時間,算法實(shí)時性得到提高。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55