一種由分立導引頭集成構建的復合末制導系統*
2019-07-20 06:44:04王學偉
火力與指揮控制 2019年6期
王學偉
(濰坊科技學院,山東 濰坊 262700)
0 引言
高技術條件下的現代海戰中,反艦導彈面臨的作戰環境越來越復雜,不僅艦載攔截武器迅速發展,構成了對反艦導彈的層層攔截,以硬殺傷手段來削弱反艦導彈的突防能力,而且各種有源干擾、無源干擾、隱身技術以及電子誘餌的使用進一步削弱了反艦導彈的突防能力[1]。因此,隨著戰場環境的日益復雜和水面艦艇綜合防護能力的提高,單一體制的制導方式已難以適應日益復雜的戰場環境[2]。發展多模復合導引頭,提高目標選擇判別能力、抗干擾能力和突防能力是反艦導彈的必然趨勢[3]。
文獻[4]針對單一制導模式抗干擾能力弱的缺點,對主動雷達/紅外復合制導在典型干擾情況下的數據融合抗干擾性能進行了仿真。文獻[5]提出了一種雷達與紅外的融合跟蹤方法,運用卡爾曼粒子濾波算法對目標狀態進行初估計,將雷達和紅外得到的目標狀態估計采用協方差加權融合得到目標最終的狀態估計。文獻[6]研究了激光/紅外復合導引頭的抗干擾策略,結合激光獲取的目標距離信息,提出了復合抗干擾策略。文獻[7]針對復合制導中不同測量系統時鐘不匹配將會產生較大誤差的問題,使用線性插值時間校準方法來完成時間校準,并通過仿真分析了時鐘匹配的影響。文獻[8]分析了主動雷達/紅外成像復合制導的抗干擾機理,討論了改進型復合誘餌干擾方式。文獻[9]構建了雷達/紅外復合導引頭抗干擾指標體系,并對指標因子進行了建模分析。文獻[10]提出了一種基于單模導引頭實現復合制導對抗試驗的方案,并分析了時空配準、數據關聯和融合檢測識別等關鍵技術的解決方法。
主動雷達導引頭和紅外成像導引頭提供的信息具有互補性,兩者復合能夠有效提高對目標的檢測、判別和跟蹤能力[11]。本文采用分立的主動雷達導引頭和紅外成像導引頭構建復合制導處理系統,模擬反艦導彈主動雷達/紅外成像復合導引頭對艦船目標的探測跟蹤過程,主動雷達導引頭提供的目標信息包括:距離、速度、方位、戰斗指令,紅外成像導引頭提供的目標信息包括:方位角、俯仰角。復合制導處理系統接收主動雷達導引頭和紅外成像導引頭輸出的目標信息,經過綜合處理,得出對目標的復合判斷。本文采用分立導引頭集成構建復合目標探測系統,涉及如下關鍵技術:空間對準、數據關聯[12]、目標判別。
1 空間對準
對某型主動雷達導引頭和某型紅外成像導引頭進行空間對準,以減小系統誤差。安裝原則為主動雷達導引頭和紅外成像導引頭輸出的方位角偏差最小,參照圖1所示。
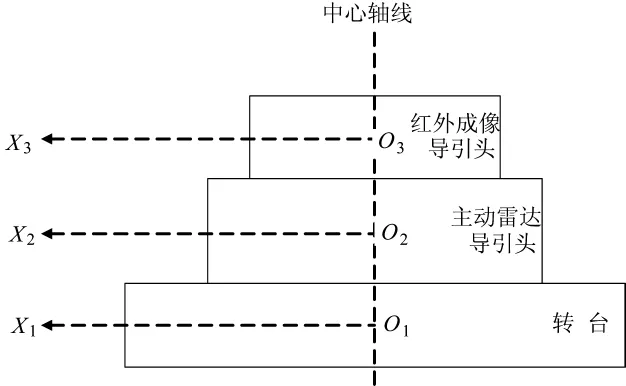
圖1 主動雷達導引頭和紅外成像導引頭空間對準示意圖
1)采用紅外成像導引頭在上,主動雷達導引頭在下的布局,固定在同一轉臺上;
2)保證轉臺的中心O1、主動雷達導引頭的中心O2、紅外成像導引頭的中心O3在同一鉛垂線上;
3)保證在零位狀態下,轉臺的零位軸O1X1、主動雷達導引頭的電軸O2X2、紅外成像導引頭的光軸O3X3平行,且在同一鉛垂面上;
4)保證轉臺固定臺面的水平度以及轉臺放置平面的水平度。
安裝完成后,在外場選定一個固定目標作為標定參照物進行標定,主動雷達導引頭和紅外成像導引頭對標定參照物輸出的方位角偏差δ作為系統誤差。
2 數據關聯
末制導復合的前提是兩個導引頭探測到的是同一個目標,如果不是同一目標,則根本無從談及信息互補,更談不到對目標的優化探測。數據關聯的研究內容是保證兩個導引頭探測到的是同一個目標,是復合制導信息處理的基礎。
數據關聯的實質是保證兩個導引頭探測到的是同一目標。為完成正確的數據關聯,需要完成如下兩部分內容的工作:
對于潛在目標,主動雷達導引頭和紅外成像導引頭對其進行探測,都要輸出目標的方位角。兩個導引頭對目標的多次測量構成了測量數據集合,這些測量數據是服從正態分布的。設主動雷達導引頭對目標的測量數據集的標準差為δ1,紅外成像導引頭對目標的測量數據集的標準差為δ2。若主動雷達導引頭和紅外成像導引頭探測到的是同一目標,考慮到空間對準時主動雷達導引頭和紅外成像導引頭之間的系統誤差,則為了減小虛警率,取連續3次測量值進行判別,若連續3次測量值都滿足小于或等于3(δ1+δ2)+δ,這樣就以 0.997 3 的概率保證了主動雷達導引頭和紅外成像導引頭探測到的是同一目標。
對于潛在目標,設主動雷達導引頭對其探測,輸出的方位角為ψ1,標準差為δ1;紅外成像導引頭對其探測,輸出的方位角為ψ2,其標準差為δ2。對于連續的3組測量數據,若

則按概率論的3δ準則,上述兩導引頭輸出的目標方位角之間的差值小于或等于3(δ1+δ2)+δ的概率為0.997 3,則判定主動雷達導引頭和紅外成像導引頭探測到的是同一目標。其中δ為空間對準時主動雷達導引頭和紅外成像導引頭對標定參照物輸出的系統誤差。
若上式不成立,則不是同一目標,這時處理紅外成像導引頭輸出的紅外圖像進行目標判別。通過圖像處理,有兩種情況:
1)紅外成像導引頭跟蹤的是目標:則主動雷達導引頭跟蹤的是非目標,發出重置指令給主動雷達導引頭,主動雷達導引頭接收指令,回到初始位置(即與轉臺零位軸重合),重新進行搜索,捕獲目標后,再和紅外成像導引頭進行數據關聯。
2)紅外成像導引頭跟蹤的是非目標:發出報警指令給紅外成像導引頭,紅外成像導引頭接收指令,回到初始位置(即與轉臺零位軸重合),重新進行搜索,捕獲目標后,再和主動雷達導引頭進行數據關聯。
3 目標判別
本方法綜合利用分立的主動雷達導引頭和紅外成像導引頭提供的目標信息進行目標判別,主動雷達導引頭提供高精度的目標距離信息,紅外成像導引頭提供豐富的目標圖像信息,將兩者復合處理,能夠提高判別置信度,降低虛警率。核心思想是:在由主動雷達導引頭測得的給定距離下,由紅外成像導引頭輸出的目標圖像的像素個數是固定的,并且遵循距離越遠,像素數越少,距離越近,像素數越多的規律。同時,在給定距離下,目標幾何尺寸越大,目標圖像像素數越多,目標幾何尺寸越小,目標圖像像素數越少。這樣,對于特定的目標,通過檢驗距離和像素數的關系,可以對目標進行判別。
方法主要包括如下內容:
1)取合作目標艦船進行標定,建立合作目標艦船圖像像素數與距離關系數據庫。
標定的目的是建立數據庫,數據庫包含合作目標艦船在紅外成像導引頭視場一定時,不同距離(由主動雷達導引頭測得)和不同角度(合作目標艦船的運動方向與紅外成像導引頭視線方向的夾角)下的圖像像素數(由紅外成像導引頭輸出的紅外圖像處理得出)。
選取己方艦船作為合作目標,合作目標艦船的幾何尺寸(長、寬、高)是已知的。標定時,主動雷達導引頭和紅外成像導引頭放置在同一轉臺上,轉臺的位置固定。合作目標艦船由近及遠運動。主動雷達導引頭跟蹤目標并鎖定,紅外成像導引頭跟蹤目標并鎖定。為減小標定的工作量,合作目標艦船與導引頭的距離選擇 1 km、2 km、3 km、4 km、5 km、10 km、15 km、20 km 8個量程,上述距離由主動雷達導引頭測得。在每一個距離點上,合作目標艦船的運動方向(從船尾到船頭的艦船縱軸方向)與紅外成像導引頭視線方向的夾角有兩個:0°和90°,即記錄兩種合作目標艦船的運動狀態。記錄每個距離點和合作目標艦船運動狀態下的紅外圖像并進行存儲,經圖像處理運算得到合作目標艦船圖像像素數,并填充到數據庫中,如表1所示。數據庫的格式如下:
合作目標艦船尺寸(m):長×寬×高
紅外成像導引頭視場:方位度數×俯仰度數
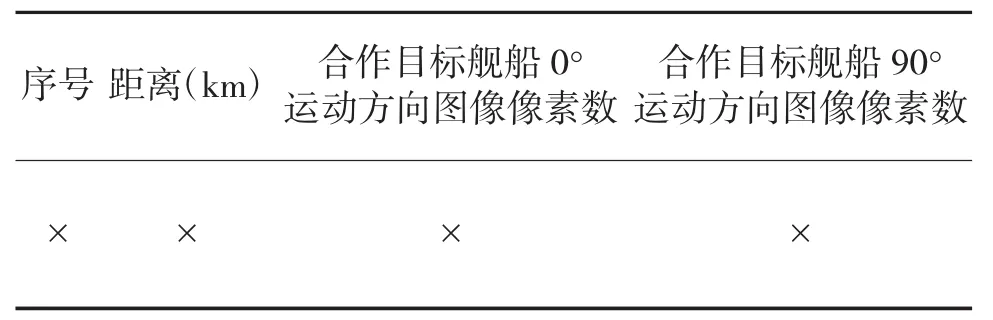
表1 合作目標艦船圖像像素數與距離關系數據庫
填好上表后,就形成了合作目標艦船圖像像素數與距離關系數據庫。
當距離不等于上述給定距離時,采用插值方法求得。
當距離一定時,合作目標艦船運動方向(從船尾到船頭的艦船縱軸方向)與紅外成像導引頭視線方向夾角為0°時,目標圖像像素數最少,為90°時,目標圖像像素數最多。其他夾角時,合作目標艦船圖像像素數應位于上述兩者之間。
2)對于潛在目標,通過計算給定距離上的目標圖像像素數,結合主動雷達導引頭測得的距離進行判斷,檢驗像素數和距離的關系,完成目標判別。
對于潛在目標,根據戰場情報可知其尺寸,在此設為長×寬×高=M(以m為單位,為已知量),通過紅外成像導引頭輸出的圖像處理后得到其圖像像素數為S。設合作目標艦船尺寸長×寬×高=N(以m為單位,為已知量),合作目標艦船0°運動方向圖像像素數為A,合作目標艦船90°運動方向圖像像素數為B。則潛在目標在給定距離上的圖像像素數S滿足下式:

為減小漏報概率,將量程進行如下擴大,即如果下式成立

則認為該潛在目標為待攻擊目標,從而完成目標判別。
否則不是待攻擊目標,需重新選擇。
4 結論
多模復合制導是提高目標檢測識別能力的必然發展趨勢。本文方法立足現有裝備,在空間對準、數據關聯、目標判別3個信息處理流程中,將分立導引頭的冗余信息進行融合處理,該融合處理算法的最大特點是計算量小,實時性好,實現了“信息倍增”的效果。該方法已應用于實際外場裝備中,通過多次外場試驗,顯著提高了海天背景中艦船目標檢測識別的置信度和可靠性。相對于單一的主動雷達和紅外成像處理算法,本文提出的信息融合算法,對由天氣變化、電磁干擾等因素造成的敏感程度顯著降低,可以為集成式復合導引頭的研制提供有益參考。