考慮轉向的汽車主動避撞控制系統研究
2019-07-19 05:36:48陰培蔣拯民葉茂趙帥周博林
汽車技術 2019年7期
關鍵詞:智能
陰培 蔣拯民 葉茂 趙帥 周博林
(1.長安大學,西安 710064;2.中國汽車技術研究中心有限公司數據資源中心,天津 300300)
主題詞:智能車輛 避撞決策 避撞控制 轉向避撞 制動避撞
1 前言
隨著智能化水平不斷提高,越來越多的汽車集成高級輔助駕駛(ADAS)功能,有效提高了車輛的主動安全性,如何設計避撞控制算法、充分發揮智能車輛的避撞潛力已成為智能車輛安全性研究的重要任務之一。
國內外學者對智能車輛的避撞控制進行了相關研究。文獻[1]~文獻[5]通過對節氣門開度和制動壓力的協調控制實現了車距與車速保持、緊急制動,但對制動過程中乘坐舒適性和道路附著能力限制考慮不足;文獻[6]基于正弦加速度函數建立了避撞換道軌跡,但避撞控制的側向加速度閾值較高且換道穩定性較差;文獻[7]規劃了換道避撞軌跡,設計了模型預測控制(Model Predict Control,MPC)換道控制器,但只考慮了前車勻速工況;文獻[8]~文獻[10]設計了橫向滑模控制器,以前輪轉角作為控制輸出,但滑模控制抖振特性會加劇車輛部件磨損;文獻[11]假設車輛前輪小幅轉動并設計了橫向控制器,與車輛轉向避撞時前輪大幅轉動的工況不符。
由此可見,目前智能車輛避撞控制多將制動和轉向分開研究,且車輛縱向制動避撞系統的研究已經成熟,但采用制動、轉向相結合的研究較少,且涉及兩者協調控制的避撞系統研究尚存諸多不足:文獻[12]分析了前車靜止和運動條件下的制動避撞和轉向避撞所需安全距離和安全收益,模型推導過程中假設以道路-輪胎所能提供的最大加速度進行制動或換道,與實際駕駛工況不符;文獻[13]所研究的制動/轉向避撞系統僅在制動無法避撞時才采取轉向避撞,不能充分發揮避撞潛力;文獻[14]設計了縱向分層制動控制器和側向終端滑模控制器,但未能建立轉向、制動避撞決策機制。上述控制方法都未能考慮制動、轉向加速度約束,影響乘坐舒適性[15]。
本文針對以上研究的不足,將智能車輛避撞限定為僅通過轉向和僅通過制動[16],設計了本車在低速、中速和高速不同工況下的制動/轉向避撞控制方法,提出了基于碰撞時間(Time To Collision,TTC)和跟車時距(Time Head Way,THW)的智能車輛轉向避撞和縱向制動決策機制,并通過Simulink/CarSim聯合仿真驗證智能車輛避撞控制的協調性有效性。
2 整車數學模型及橫、縱向控制系統
2.1 車輛動力學模型
本文將車輛簡化為二自由度汽車模型,建立的車輛動力學模型分析了車輛縱向受力情況,忽略車輛側傾和俯仰運動,忽略懸架和轉向系統,并以前輪轉角作為系統輸入。各車輪受力和整車縱向運動受力分別如圖1和圖2所示。

圖1 車輪受力示意
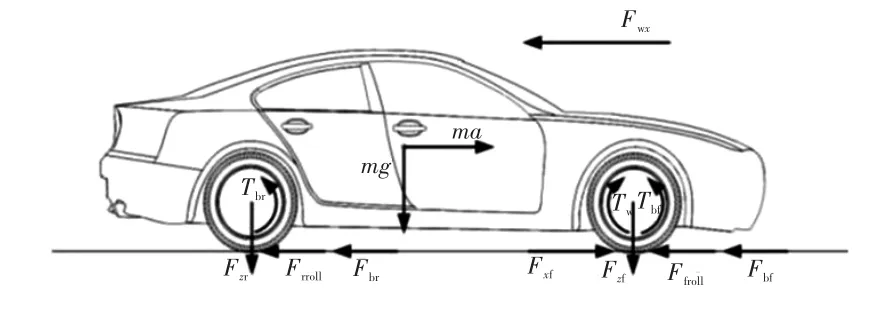
圖2 車輪縱向運動受力分析
圖2中,Fxi和Fyi分別為車輪所受縱向力和橫向力(i=1,2,3,4分別表示左前、右前、左后、右后輪);lf和lr分別為質心至前、后軸距離;δ為前輪轉角;lw為輪距;h為質心距地面高度。車輛縱向運動微分方程為:

式中,m為整車質量;vx、vy分別為縱向和橫向車速;ω為橫擺角速度;Fx為車輛縱向受力;Ft為驅動力;Ff、Fw和Fb分別為滾動阻力、空氣阻力和車輛制動力。
2.2 橫向控制系統
2.2.1 轉向避撞軌跡規劃
車輛轉向避撞所處的道路環境如圖3所示。圖3中,M為本車,B為本車轉向避撞時相鄰車道的車輛,C為本車轉向避撞時前方車輛。以C靜止為例,假設B及時發現M的轉向動作,以減速度aB制動,為避免B與M可能產生的追尾碰撞,M轉向避撞時必須與B保持的最小縱向距離為:

式中,L為車身長度;vB為B的車速;T為車輛完成轉向動作的時間;d0為兩車相對靜止時需保持的安全距離。
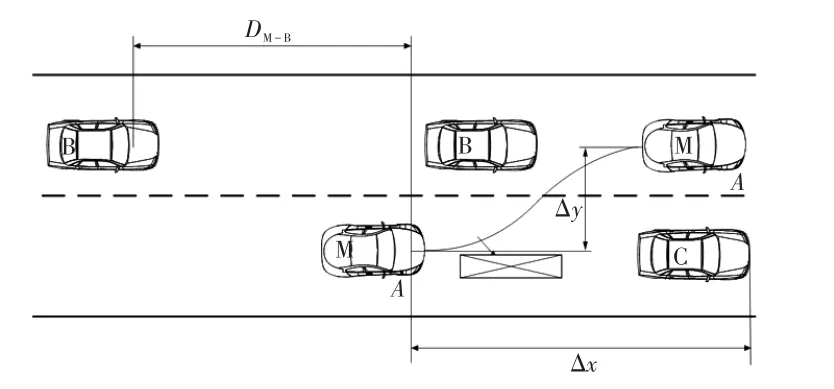
圖3 車輛轉向避撞道路環境
只有當M與B的縱向距離Dadj≥DM-B且道路和周圍環境滿足轉向避撞決策條件時,M采取轉向避撞動作。大量的實車試驗數據也表明,多項式可以很好地逼近駕駛員真實轉向運動軌跡[17],本文選取五次多項式進行避撞軌跡規劃。
規定車輛轉向起點到終點的縱向距離為Δx,側向距離為Δy,構造五次多項式避撞參考路徑:

式中,yref和xref分別為車輛在轉向過程中行駛的側向距離和縱向距離;c0~c5分別為各項系數。
以本車坐標系為參考,起始時刻車輛的橫向位移、側向速度和側向加速度均為0,車輛以vx的速度勻速行駛。因此yref的一階、二階、三階導數均為0。代入式(4),可得:c0=c1=c2=0,c3=10Δy/(Δx)3,c4=15Δy/(Δx)4,c5=6Δy/(Δx)5。
此處車輛以勻速轉向,將xref=vx·t代入式(4),得到避撞參考路徑關于時間t的表達式:

將式(5)對時間求導可得:

由式(6)可知,為提高車輛橫向運動的乘坐舒適性,規劃避撞軌跡時只需調節T和Δy即可將最大側向加速度限制在一定范圍內。
2.2.2 帶預瞄路徑跟蹤模型
帶預瞄路徑跟蹤方法基于轉向幾何學理論,研究車輪轉角與預瞄點(gx,gy)處期望軌跡間的關系,如圖4所示。
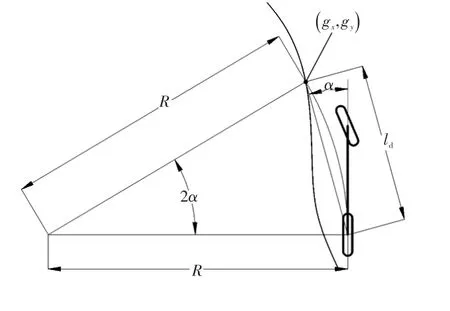
圖4 帶預瞄路徑跟蹤模型
預瞄點為從當前車輛后軸中心出發,到目標路徑距離為ld的一點,同時定義車輛后軸中心到預瞄點(gx,gy)的橫向距離為橫向循跡誤差eld,由幾何關系可得:

預瞄距離ld與車速vx呈正相關:

式中,k為調整系數;α為車輪轉角;R為轉向半徑。
期望前輪轉角為:

將式(7)~式(9)代入式(10)中,可得帶預瞄路徑的跟蹤控制律為:

2.3 縱向避撞分層控制系統
2.3.1 LQR期望加速度控制器
當車輛采取縱向制動避撞時,首先需要獲取期望加速度,自車與前車的相對距離為:

式中,Xf為前車縱向位置;Xc為自車縱向位置。
定義ε為臨界制動距離與實際車距的差值,為前車與自車的速度差,構建含自車實際加速度的狀態向量為,控制量為u=[a],其中a為自車加速度,前車加速度干擾量為ω,得到離散形式的車輛縱向制動狀態空間模型:

依據最優控制理論,設計性能指標函數為:

聯立式(13)、式(14),得到加速度為:

與轉向避撞施加乘坐舒適性約束類似,文獻[18]在統計了125名駕駛員的制動過程后指出,制動減速度小于2 m/s2時,乘坐舒適性較好,制動減速度大于4 m/s2時,乘坐舒適性較差,據此將制動強度分級如表1所示。
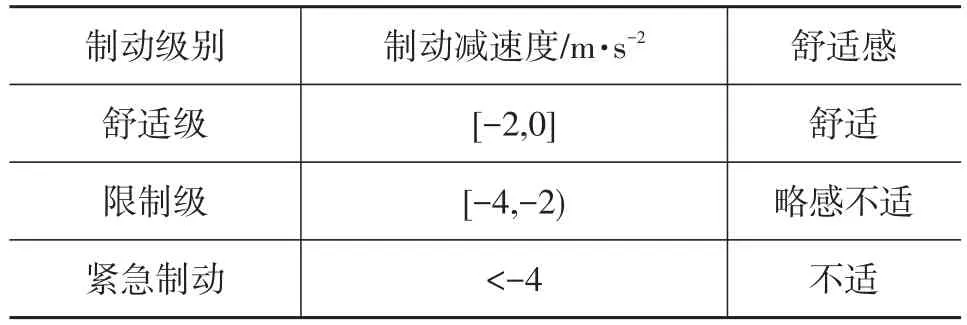
表1 制動強度分級
車輛采取制動避撞時,首先由式(15)計算期望制動減速度,為降低縱向制動時的不舒適感,將期望加速度ades限制在相應制動強度級別內:

式中,ψ為地面最大附著系數。
2.3.2 節氣門/制動壓力邏輯切換
車輛采取制動避撞時,設計含狀態保持層的節氣門/制動壓力切換邏輯曲線[13],如圖5所示。該曲線由車輛節氣門開度為0的初始減速度決定。
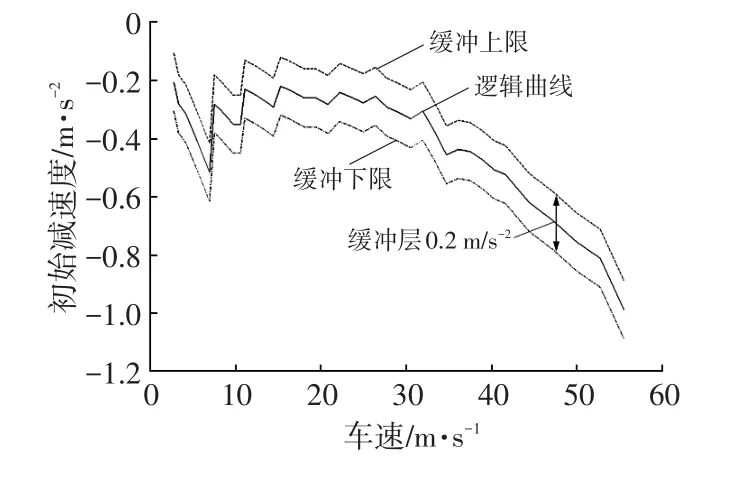
圖5 節氣門與制動壓力切換邏輯
設計含有緩沖層的切換邏輯為:
a.ades-a0>0.1 m/s2時,進行節氣門控制,制動壓力為0。
b.ades-a0<-0.1 m/s2時,節氣門開度為0,進行制動壓力控制。
c.|ades-a0|≤0.1 m/s2時,狀態保持,維持上一時刻的制動壓力和節氣門開度。
其中,a0為當前車速下初始減速度。
2.3.3 動力傳動系統逆向控制
本文以期望加速度作為模型輸入,以期望制動壓力和節氣門開度作為模型輸出,動力傳動系統逆向控制結構如圖6所示。
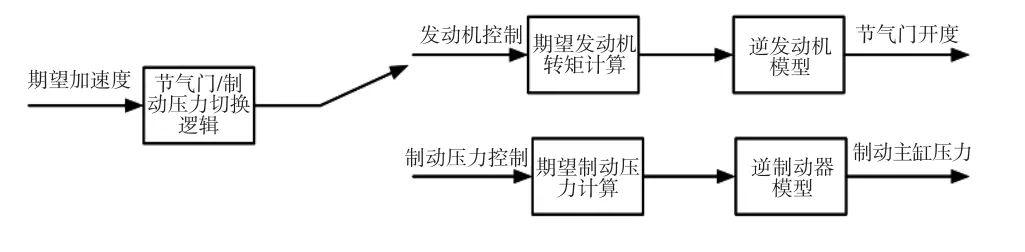
圖6 傳動系統逆向動力學模型
假設發動機經液力變矩器、變速器、主減速器傳遞到車輪上的驅動力為Ft,參看文獻[13]的計算過程最終得到期望制動主缸壓力為:

式中,Kb為制動力和制動壓力的比例系數;Fwx為縱向空氣阻力;Froll為滾動阻力。
3 避撞控制系統設計
3.1 避撞控制系統結構
智能車輛避撞控制系統結構如圖7所示,是包含風險預判、轉向控制和制動控制的綜合控制系統。

圖7 避撞控制系統結構
圖7中,基于風險預判的避撞決策機制根據前方道路曲率信息、自車速度、引導車輛速度、加速度等,計算不同工況下的碰撞風險,決策車輛所要采取的制動或轉向動作。帶預瞄路徑跟蹤模型研究車輪轉角與預瞄點(gx,gy)處期望軌跡間的關系,得到前輪轉角。制動控制器以LQR計算的期望加速度作為輸入信號,根據傳動系統逆動力學模型計算制動壓力。
3.2 避撞決策機制
本文針對前車靜止和勻速工況建立相應的避撞決策機制,從確保道路交通安全的角度出發,暫不討論智能車輛近距離跟隨前車的情況。以TTC和THW共同表征碰撞風險:
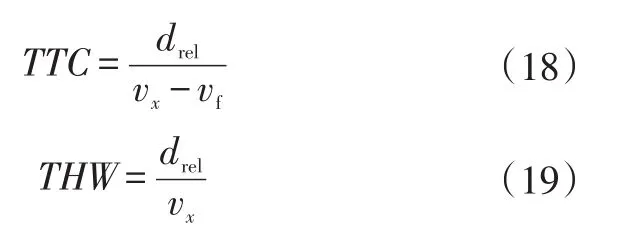
式中,vf為前車速度。
考慮到轉向避撞,為滿足橫向乘坐舒適性和穩定性約束,依據前文提到的轉向路徑分析,此處規劃留給轉向避撞的時間T=2 s。不同工況下,TTC和THW變化情況不同。
3.2.1 前車靜止
在此工況下,采取制動/轉向避撞動作的臨界點為:

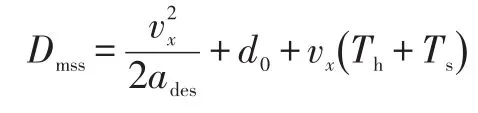
以Th=0.1 s,Ts=0.28 s,d0=3 m為例,制動/轉向避撞TTC和THW的比較曲線分別如圖8所示。

圖8 靜止障礙物制動/轉向避撞TTC/THW比較
3.2.2 前車勻速運動
只有在自車速度高于前車時,才有碰撞風險,此種工況下采取制動/轉向避撞動作的臨界TTC和THW為:

以vf=20 m/s、Th=0.1 s、Ts=0.28 s、d0=3 m為例,制動/轉向避撞TTC比較曲線如圖9所示。

圖9 前車勻速制動/轉向避撞TTC比較
以vf=10 m/s、Th=0.1 s、Ts=0.28 s、d0=3 m為例,制動/轉向避撞THW比較曲線如圖10所示。
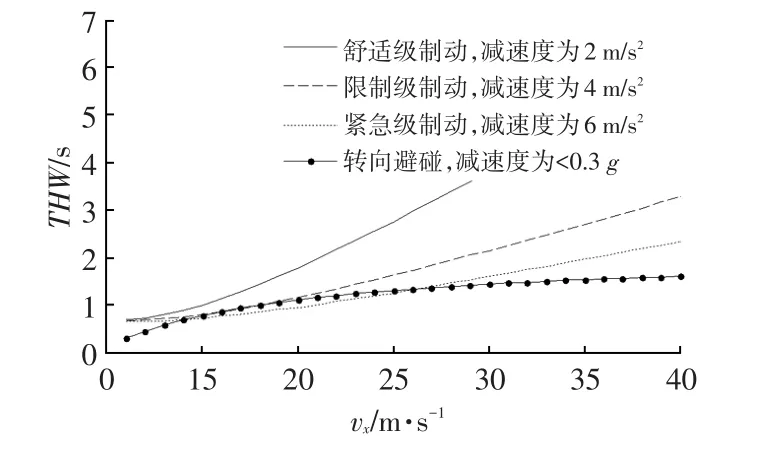
圖10 前車勻速制動/轉向避撞THW比較
本文選取兩輛試驗車輛,采取前后跟隨的方式在試驗場或選定的路段進行車輛避撞控制試驗,采集危險發生過程中的TTC和THW,并根據自車車速和相對車速的不同,選擇適當的制動避撞或者轉向避撞。根據試驗數據分析,建立如圖11所示的決策機制,確定TTC1=0.8 s,TTC2=2.5 s,TTC3=3 s,THW1=0.5 s,THW2=1.5 s,THW3=3 s。并且,通過試驗發現當車輛在行駛過程中制動避撞失效時,路面附著系數、側向加速度、橫擺角速度以及質心側偏角等滿足轉向條件,可以選擇轉向避撞。可得如下結論:
a.當車速在(20,30)m/s范圍內,轉向不存在危險時,轉向避撞較制動避撞更舒適。因為該車速下車輛制動控制所需的制動距離較大,可能與前車發生碰撞。此外,高速行駛的車輛在緊急制動過程中,由于制動減速度過大,會使駕駛員及乘客產生嚴重的不舒適感。
b.當車速≥30 m/s時,緊急情況下轉向會更加危險,所以選擇制動避撞。
c.當車速≤20 m/s時,緊急制動會使車輛在最短的時間內停止。所以,相比于轉向避撞,制動避撞更加安全,且對駕駛員的駕駛技術要求更低。
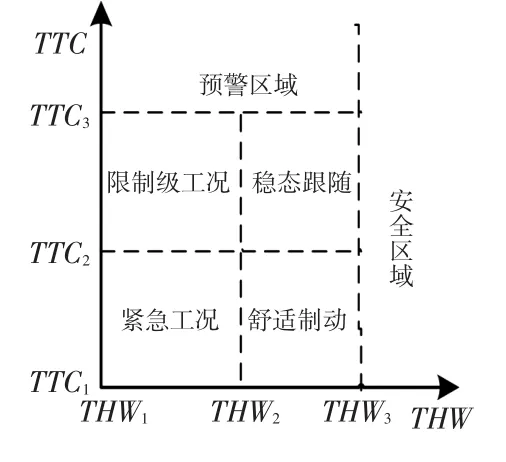
圖11 避撞決策機制
4 仿真及結果分析
選取某車型為仿真對象,其整車參數如表2所示。采取前述的避撞控制算法和仿真參數,分析智能車輛在幾種特殊工況下的轉向避撞路徑跟蹤誤差、側向加速度、質心側偏角、制動避撞的車間縱向距離誤差。

表2 某車型整車參數
針對本車低、中、高3種車速和前車不同行駛條件,在3種工況下進行仿真,各工況仿真參數如表3所示。通過本車和前車的車速、車間距可計算出兩車的TTC和THW,對比車輛制動/轉向避撞決策機制,選擇合適的避撞機制。
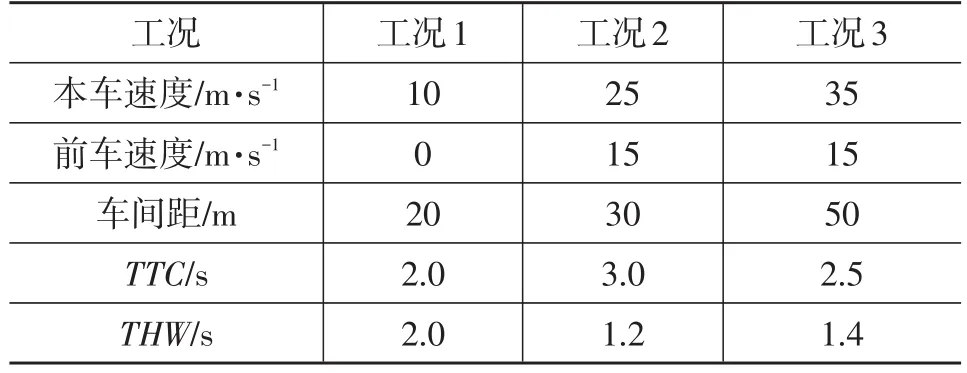
表3 車輛避撞仿真工況
圖12~圖14所示分別為3種工況的仿真結果。由圖12可以看出,本車基本在緊急制動減速度限值內減速,最終在與前車相距2.2 m時停止。由圖13可以看出,車輛完成轉向動作時已經繞過前車且車輛能夠較好地跟蹤避撞參考路徑,由于車輛行駛速度較高,航向角誤差也相應增加,但最大航向角誤差仍不超過1°。由圖14可以看出,車輛在與前車最近相距3.53 m時,自車減速至停止,殘存一定制動力矩以使車輛保持靜止狀態。
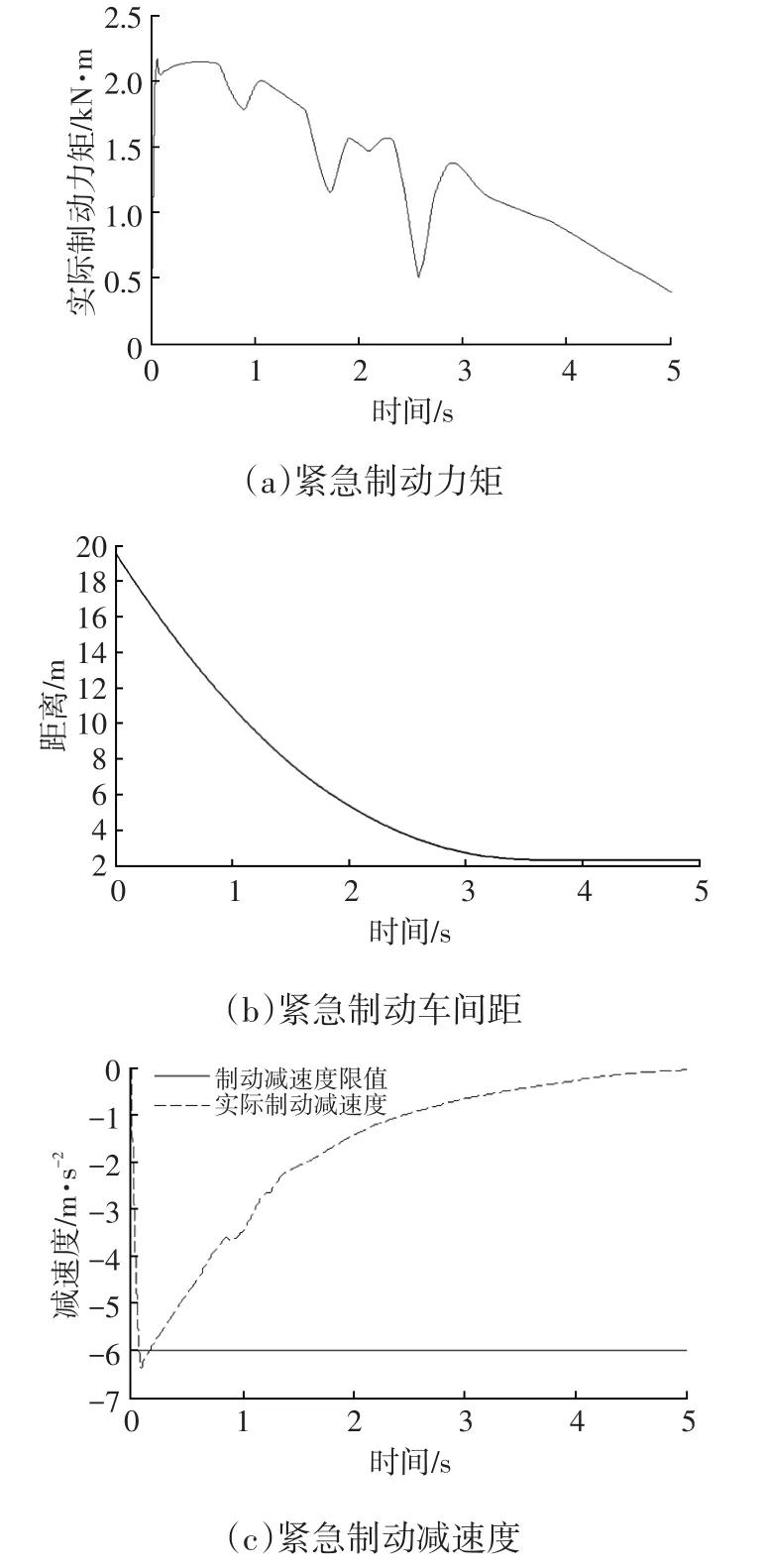
圖12 工況1緊急制動避撞
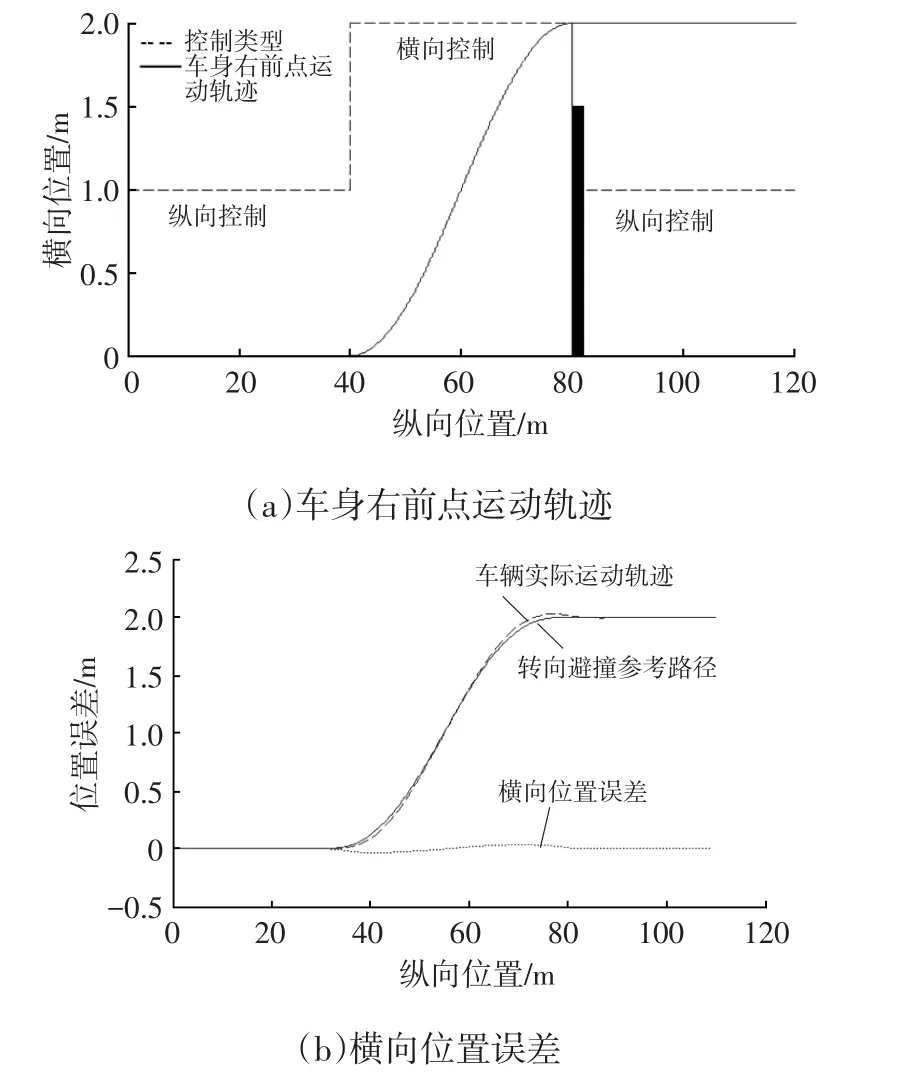
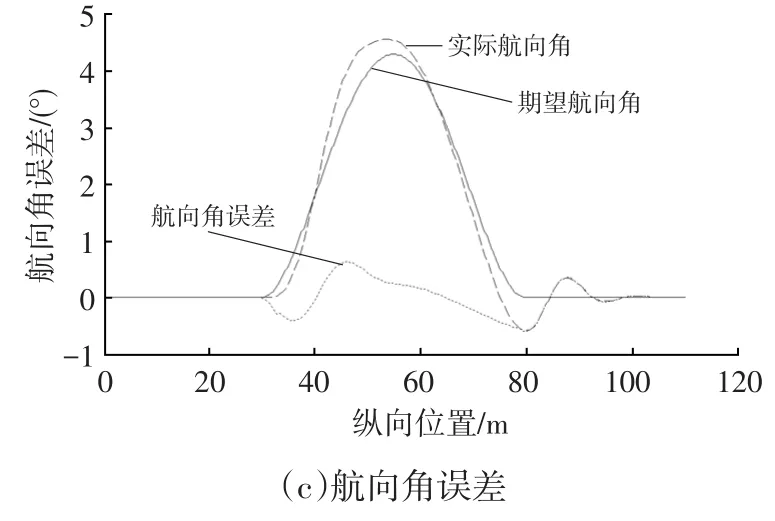
圖13 工況2舒適轉向避撞
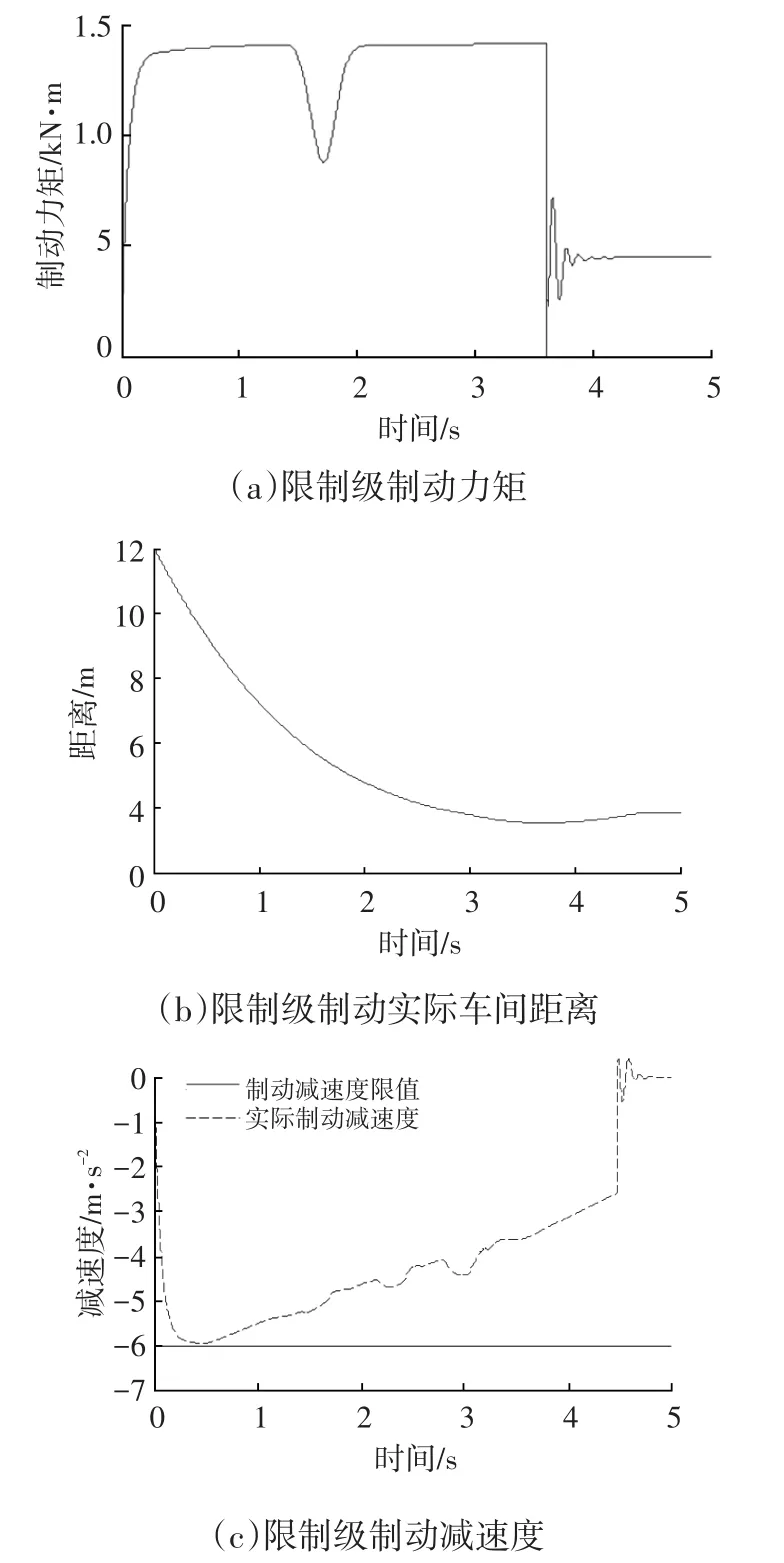
圖14 工況3限制級制動避撞
為了進一步定量比較不同工況下車輛制動/轉向避撞的有效性和舒適性,統計上述仿真結果中車輛與避撞參考路徑的最大橫向位置誤差ecgmax、最大航向角誤差θemax、側向加速度峰值amax、側向加速度均值amean和質心側偏角峰值βmax[19]如表4所示。
由表4可以看出:當預留給轉向避撞的時間為2 s時,ecgmax≤0.05 m,amean≤1 m/s2,βmax≤0.5°,各工況下的車輛轉向動作可以良好地兼顧安全性和乘坐舒適性、轉向穩定性;當車輛采取制動避撞時,相應工況下的車輛最大制動減速度都能保持在制動減速度限值附近,在確保制動安全的前提下,兼顧了不同制動強度下的乘坐舒適性。
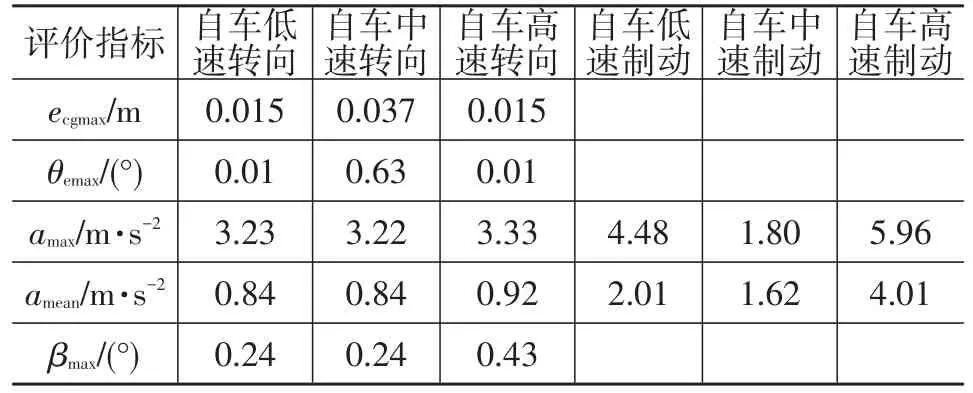
表4 不同工況避撞評價指標
5 結束語
本文針對現有智能車輛僅采用制動方式避撞的不足,提出了融合制動/轉向的避撞控制方法及決策機制,基于五次多項式設計了融合加速度約束的避碰參考路徑,利用帶預瞄路徑跟蹤控制對車輛橫向運動進行控制,采用LQR控制器獲得了被控車輛的期望加速度,基于動力傳動系統逆模型得到期望節氣門開度/制動力矩,構建了完整的智能車輛避撞控制系統結構,提出了基于TTC和THW危險評級的制動/轉向避撞機制,通過試驗確定兩者閾值,并建立避撞決策機制。
仿真驗證結果表明,本文提出的制動/轉向決策機制能夠充分發揮智能車輛的避撞潛力,進一步提高了智能車輛的主動安全性。后續將開展進一步的實車驗證,并在車輛轉向避撞控制中融入主動轉向控制,以期進一步提高轉向穩定性。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
