基于高斯混合模型的航跡抗差關聯算法
2019-07-18 03:49:52李保珠董云龍丁昊關鍵
航空學報 2019年6期
關鍵詞:關聯
李保珠,董云龍,丁昊,關鍵
海軍航空大學 信息融合研究所,煙臺 264001
在分布式多雷達信息融合系統中,航跡關聯是信息融合的一項關鍵技術,旨在確定哪些局部航跡源于同一目標[1]。當雷達存在不完全相同的監視區域、漏探、隨機虛警時,造成雷達上報目標不完全一致,導致在另一雷達上報的航跡集合中不存在對應航跡,使得原本復雜的航跡關聯問題難度增大。此外,系統誤差普遍存在于雷達探測過程中,且受到多種因素影響,造成目標的位置狀態估計與真實目標位置之間存在偏差[2-4],使得傳統的航跡關聯算法性能惡化嚴重。
為解決系統誤差下雷達航跡關聯問題,文獻[5-8]利用目標的相對位置信息,提出了基于目標參照拓撲的航跡關聯算法,此類算法認為目標間的相對位置關系不受系統誤差的影響,但未考慮坐標系的轉換中系統誤差隨目標與雷達的相對位置變化,且無法在理論上給出關聯門限。Mori等[9]在目標運動特性的基礎上綜合利用目標屬性特征信息,提出了基于輔助特征的航跡關聯算法。文獻[10]基于等價量測一階泰勒展開推導出全局直角坐標系下目標狀態估計分解方程。文獻[11-12]在此基礎上利用真實狀態對消得到目標間的航跡矢量,采用航跡矢量檢驗算法實現雷達目標航跡抗差關聯。此外,由于航跡關聯與誤差配準相互耦合[13],使得關聯和配準的聯合求解成為一種新的解決策略。文獻[14]將系統誤差引入到原始的雷達量測中,構建了一種混合整數非線性規劃模型,并對系統誤差進行了估計。文獻[15]采用多初始點局部搜索的方法,尋找最優系統誤差估計值,聯合解決航跡關聯和雷達誤差配準問題。文獻[16]采用K-best方法進行航跡關聯,同時采用最大似然估計的方法求解系統誤差。基于圖像匹配的航跡關聯算法[17-20]在一定程度上解決了航跡關聯問題,成為一種新的航跡抗差關聯算法。
受圖像匹配中點模式匹配模型的啟發,本文將非剛性點集匹配理論引入到雷達航跡抗差關聯中,提出了一種基于高斯混合模型的航跡抗差關聯算法,首先推導了系統誤差下目標測量方程,利用非剛性變換表征航跡集合間的位置關系;其次采用高斯混合模型與航跡間拓撲信息相結合的方法,建立對非同源航跡具有魯棒性的高斯混合模型,根據航跡間的鄰域拓撲信息決定高斯混合模型中各高斯組成部分的初始權重;接著利用期望最大值(EM)算法求解高斯混合模型的最優閉合解,在期望步(E-step)階段求解航跡的對應關系的概率分布,在最大化步(M-step)階段求解非同源航跡比例,然后通過航跡關聯判決以獲得關聯結果,最后通過仿真驗證各種場景下算法的有效性和魯棒性。
1 問題描述
圖1為某時刻雷達及目標位置分布圖,以雷達A為原點建立全局直角坐標系,設雷達A、B的位置坐標分別為 (0,0)、(xB,0),目標T 分別為雷達A、B探測到的第i、j個目標。圖中TAi、TBj分別表示目標T相對于雷達A、B的量測位置。由于雷達在探測過程中存在系統誤差和隨機誤差,雷達測量與目標的真實距離、方位角存在偏差。雷達A對目標T的量測為

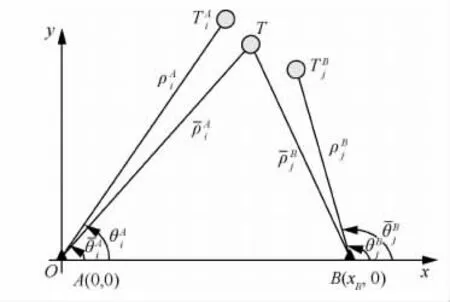
圖1 雷達及目標分布Fig.1 Location of radars and targets

同理,在雷達B處有

若兩航跡源于同一目標(珚x,珔y),則

令θ0=ΔθA-ΔθB,由式(4)和式(5)得
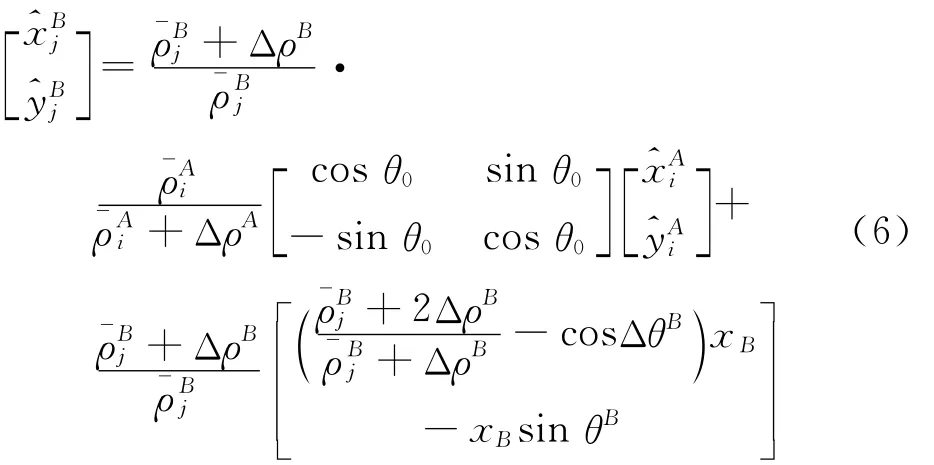
在雷達遠距離探測情況下,由于目標相對于雷達的距離遠大于測距系統誤差,ΔρA和ΔρB可忽略不計,則式(6)為

由式(7)可知,當測距系統誤差較小時,雷達A、B對同一目標的位置量測可通過剛性變換(旋轉和平移)進行描述;然而,由式(6)可知,較大的測距系統誤差不僅使得兩組航跡位置信息存在旋轉和平移,還造成目標航跡發生非剛性變換,使航跡發生一定程度的整體變形。在分布式雷達監視環境中,探測距離遠、系統誤差時變、上報目標不一致等復雜因素,使得傳統航跡關聯算法不再適用,航跡正確關聯率嚴重下降,需要進一步研究適用于上述復雜環境的航跡抗差關聯算法。
2 算法描述
2.1 航跡的鄰域特征
一般來說,源于同一目標的兩條航跡具有相似的鄰域特征,因此可根據目標航跡的鄰域拓撲信息判斷其對應關系。本文采用最優次模式分配(Optimal SubPattern Assignment,OSPA)距離[21]對目標航跡鄰域信息的差異進行度量。在全局直角坐標系下,分別為雷達A 和B 上報的航跡集合,=分別為雷達A、B對目標航跡i、j的狀態估計,M 和N 分別為雷達A、B上報的航跡數。根據歐式距離,分別選擇目標航跡i、j的K個最近鄰航跡構建鄰域集合。若目標航跡i和j 源于同一目標,則鄰域集合存在一定的相似性。在此,本文采用歐式距離分別對目標航跡的 鄰 域 特 征}進行描述。由于航跡集合中存在非同源目標航跡,因此在集合IAi中選擇l個元素構成子集進行相似性度量。定義目標航跡i、j鄰域信息相似性度量為

式中:OSPA距離定義為

目標航跡的相似性測度可表示為

當兩目標航跡鄰域特征越相似時,目標航跡的相似性測度越大,其航跡源于同一目標的可能性越大。
2.2 高斯混合模型的建立
由于剛性變換是非剛性變化的特殊情況,所以雷達A、B對同一目標的位置量測可通過非剛性變換進行描述。因此,本文將非剛性點集匹配理論引入到雷達航跡關聯中,采用具有較強魯棒性的高斯混合模型(GMM)進行點集的非剛性匹配。將航跡集合XB看作GMM中高斯模型的質心,XA看作GMM產生的樣本點集,使得GMM的質心按照一定的鄰域拓撲結構整體向樣本點集移動。質心與樣本點越近,說明航跡點匹配的概率越大。當達到最佳匹配狀態時,通過后驗概率即可獲得航跡集合的對應關系。因此,樣本點和質心之間的高斯徑向基函數為

式中:D為目標狀態估計的維度;σ2為高斯函數協方差。由于雷達上報目標不一致,航跡集合存在非同源航跡,且目標位置狀態估計存在過程噪聲,因此引入一個均勻分布:

則目標航跡^XAi的GMM概率密度函數為

式中:ω為均勻分布的權重系數。由于航跡目標鄰域拓撲結構越相似,其源于同一目標的可能性越大,因此在GMM中對應高斯組成部分的權重越大,則定義各高斯組成部分的權重概率為

根據GMM概率密度函數參數估計原理,通過極大似然估計解算GMM參數集合,即最大化對數似然函數:

在非剛性點集匹配中,點集集合間的變換關系[22]可表示為

式中:v(XB)為位移函數,為使航跡集合間的變換更加平滑,本文引入一個正則項[22],使航跡集合保持運動一致性進行整體移動。因此,在再生核希爾伯特空間引入正則化函數。根據文獻[22],式(16)關于參數集合與樣本點集的數學期望為

其中:β為平滑性系數。點集集合間的變換關系可表示為XA=XB+GW ,并代入式(18)得
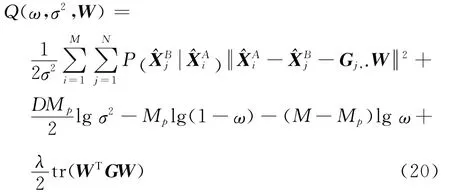
式中:Gj,·為高斯核矩陣的行向量。
2.3 基于EM算法的航跡關聯
為求解式(20)中的參數ρ= (ω,σ2,W),本文采用EM算法。EM算法實質是利用迭代的方法求解參數集合:
1)E-步:EL(ρ,ρ(k))=Q
2)M-步:ρ(k+1)= max EL(ρ,ρ(k))
其中:k為第k次迭代運算。通過上述兩步的不斷迭代,直至收斂得到式(20)的最優解。
2.3.1 E-步
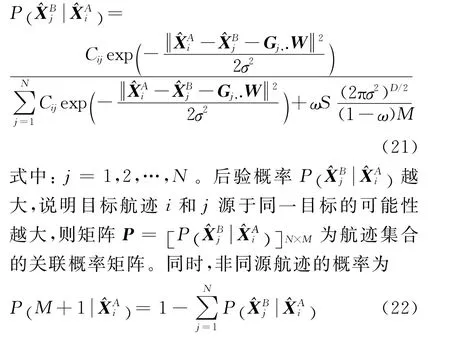
利用參數賦初始值,通過貝葉斯定理[23]計算后驗概率為
2.3.2 M-步

式中:1為全1列向量;I為單位矩陣。同理,解Q/σ2=0,Q/ω=0可得

由于在航跡關聯中非同源航跡比例ω未知,當ω較大時,式(25)在更新過程中存在過擬合現象,為此,本文采用序貫積累,更新得到修正的ω為

式中:ωold為歷史迭代解算的ω值;ωnew為式(25)解算得到的ω值;α=1/k為學習速度。隨著迭代次數k的增加,ω迭代更新速度放慢,有效避免了過擬合問題。因此,非同源航跡的比例ω可通過式(25)和式(26)聯合求解。
最后,定義二進制航跡關聯矩陣C(i,j)(i=1,2,…,M;j=1,2,…,N )。若雷達A 上報目標航跡i和雷達B上報目標航跡j源于同一目標,則滿足:

3 實驗結果與分析
3.1 仿真環境
為驗證在系統誤差時變、上報目標不完全一致等復雜場景下算法的有效性,對本文算法和經典的基于參照拓撲特征的航跡關聯(REP)算法[7]及基于傅里葉變換的航跡對準關聯(FFT)算法[17]進行仿真實驗對比。仿真環境如下:在全局直角坐標系中,兩雷達的位置坐標為(0,0)和(150,0)km,有N=20批目標在區域[72km,75km]×[72km,75km]中均勻分布,目標初始速度服從均勻分布且勻速運動,vo~U(5m/s,200m/s),目標的初始航向均勻分布在[0,2π]范圍內,兩雷達的量測誤差標準差分別為σAρ=60m,σAθ=0.4°,σBρ=80m,σBθ=0.3°,雷達系統誤差緩變,且均勻分布在0到誤差上限的范圍內,雷達的系統誤差上限分別為ΔρA=1 000m,ΔθA=-1°,ΔρB=1 000m,ΔθB=1°,雷達采樣周期為2s,目標跟蹤周期數為T=100,雷達的探測概率分別為PA=0.9,PB=0.7。在仿真初始化中,λ=2,β=2。為對比算法的關聯性能,本文采用平均正確關聯率作為評價指標[8],即實驗結果由100次蒙特卡羅仿真求均值得到正確關聯的目標數與同源航跡數的比值。圖2為目標真實航跡及雷達上報的目標航跡圖。
3.2 仿真結果分析
圖3為某時刻航跡關聯前后的對比圖,通過關聯前后對比可以看出,當雷達存在系統誤差時變、上報目標不完全一致的情況下,所提算法能夠有效進行航跡抗差關聯。
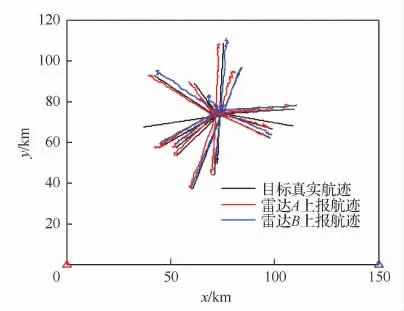
圖2 雷達上報目標航跡Fig.2 Target tracks reported by radar

圖3 某時刻航跡關聯前后的對比Fig.3 Tracks before and after association at moment
圖4 為不同測角系統誤差下所提算法性能對比圖,在仿真過程中只改變雷達測角系統誤差,測角系統誤差上限在0°~2°等間隔變化,其他參數不變。由圖可知,隨著測角系統誤差的不斷增大,FFT算法的平均正確關聯率明顯下降,所提算法和REP算法性能相對穩定,且所提算法正確關聯率達到0.9左右。圖5為不同測距系統誤差下所提算法性能對比圖,在仿真過程中只改變雷達測距系統誤差,測距系統誤差上限在0~2km等間隔變化,其他參數不變。由圖5可知,所提算法與REP算法性能較好。
通過圖4和圖5可知,隨著系統誤差的增大,所提算法與REP算法性能相對穩定,且所提算法性能略優于REP算法。FFT算法通過不斷地估計航跡間的旋轉和平移量進行補差,忽視了非同源航跡的影響,當系統誤差較大時,目標位置偏差變化較大,造成與非同源航跡錯誤關聯。REP算法以目標相對位置關系為關聯依據,在局部坐標系下,系統誤差對目標相對位置關系影響較小,系統誤差對REP算法的關聯性能影響較小。所提算法在考慮航跡集合整體位置變換關系時,還考慮到目標間相對鄰域拓撲信息與非同源航跡的比例,能更好地抵消系統誤差對航跡關聯的影響。
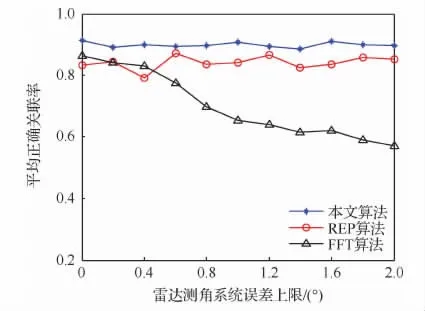
圖4 不同測角系統誤差下算法性能Fig.4 Algorithms performance via different azimuth biases

圖5 不同測距系統誤差下算法性能Fig.5 Algorithms performance via different range biases
圖6 為不同探測概率下所提算法性能對比圖,在仿真過程中只改變雷達探測概率,探測概率在0.55~1.00等間隔變化,其他參數不變。由圖6可知,隨著雷達探測概率的不斷增大,在目標數量一定的場景下,雷達上報的航跡中存在的共同觀測目標不斷增多,使得FFT算法受到非同源航跡影響變小,平均正確關聯率明顯提高。所提算法與REP算法以航跡集合與目標間相對位置關系的相似性為判斷依據,綜合利用航跡集合與局部拓撲鄰域信息,對非同源航跡的魯棒性較強,特別是所提算法實時估計非同源航跡比例,更加有效抵消非同源航跡的干擾。因此,雷達探測概率對所提算法與REP算法影響較小,隨著探測概率增加,平均正確關聯率逐步升高且趨于穩定。所提算法平均正確關聯率上升至0.9以上,性能優于REP算法。
圖7為不同目標分布密度下所提算法性能對比圖,保持目標分布區域大小不變,仿真場景中目標數量在15~50逐步增加。可以看出,隨著目標數量的增加,FFT算法的關聯性能明顯降低,REP算法雖然性能良好,但正確關聯率緩慢降低,而所提算法相對穩定,平均正確關聯保持在0.9左右。因為,隨著目標密集程度的增大,非同源航跡增多且相對密集,能達到同源航跡間的拓撲關系,且非同源航跡增多,致使FFT算法與REP算法性能下降,而所提算法通過航跡間相對鄰域拓撲信息及自適應的統計門限進行航跡關聯的判決,且實時估計非同源航跡的比例,降低非同源航跡對航跡關聯的影響。

圖6 不同探測概率下算法性能Fig.6 Algorithms performance via different detection probabilities

圖7 不同目標數量分布密度下算法性能Fig.7 Algorithms performance via the total number of targets

圖8 雷達系統誤差的均方根誤差Fig.8 RMSE of radar sensors bias
圖8 為雷達系統誤差的均方根誤差對比圖。由圖可知,所提算法對雷達系統誤差的估計精度明顯優于REP算法和FFT算法。當測角系統誤差為2°時,所提算法的平均估計偏差小于0.08°,所提算法測角系統誤差的估計精度較高。在估計測距系統誤差時,3種算法對測距系統的估計精度一般,但所提算法的估計精度優于REP算法和FFT算法。隨著系統誤差的增加,算法對系統誤差的估計精度逐步降低。這由于FFT算法易受非同源航跡的干擾,造成錯誤關聯。REP算法通過目標間的相對位置關系進行尋優,而忽略了航跡集合的整體配對。所提算法通過迭代尋優,獲得較為精確的航跡偏差。因此,所提算法優于REP算法和FFT算法。
圖9為本文算法參數λ、β對關聯性能的影響。在仿真過程中,正則項權重系數λ在0.1~8內等間隔變化,平滑性系數β在0.1~5內等間隔變化。可以看出,隨著λ的增大,本文所提算法平均正確關聯率略微降低且趨于平穩;當β≤1.5時,隨著β的增大,本文所提算法平均正確關聯率略微上升;當β≥1.5時,平均正確關聯率隨著β的增大而緩慢增大,同時在λ逐步增大過程中趨于穩定。雖然λ,β的取值對算法性能有所影響,但變化浮動相對較小。所以,當0.1≤λ≤5且1.5≤β≤4時,對應的航跡關聯性能達到最優化,且λ、β的對算法影響較小。
為驗證算法的實時性,本文基于如下配置進行仿真實驗:操作系統為 Windows 7;CPU為Intel(R)Core(TM)i7-4790CPU @3.60GHz;RAM為8GB。由表1的運行時間對比可以看出,隨著目標數目的增加,各算法平均運行時間逐漸增加。FFT算法利用匹配矩陣和目標位置不斷交替迭代,REP算法通過計算OSPA距離進行匹配矩陣的求解,兩經典算法用時均較小。本文算法每次進行航跡關聯時,EM算法估計過程需要進行不斷迭代更新,算法運行時間相對較長。

圖9 不同λ、β下算法性能Fig.9 Algorithms performance via differentλ,β

表1 算法平均運行時間Table 1 Average running time of algorithm
4 結 論
1)針對系統誤差條件下的航跡關聯問題,推導了系統誤差下目標測量方程,利用非剛性變換表征航跡集合間的位置關系。
2)本文將非剛性點集匹配理論引入到雷達航跡關聯中,建立對非同源航跡具有魯棒性的高斯混合模型,在不同系統誤差、目標分布密度、探測概率等環境下具有較好有效性和魯棒性,明顯優于傳統算法。
3)雖然在系統誤差條件下關聯性能較好,但算法的實時性有待于改善,這主要是因為在算法進行EM迭代尋優過程中具有一定的復雜性,這也將是下一步工作重點。
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42
