一種基于描繪輔助線的對于復雜背景下的星圖識別方法
2019-07-16 11:55:38王潤豐樊桂花張廷華
電子技術與軟件工程 2019年8期
王潤豐 樊桂花 張廷華

摘要:針對復雜背景下的星圖識別率不高的問題,提出了一種基于描繪輔助線的方法進行星圖識別,通過描繪星點間的輔助線,來增加星點間的紋理,使星圖變成了一般圖片識別可以檢測到特征點的圖片,從而使星圖可以使用傳統算法進行識別處理,并且不會使非星點部位的特征點信息丟失,解決了復雜背景下的星圖識別問題。
[關鍵詞]星圖識別輔助線復雜背景
圖像識別,是指利用計算機對圖像進行處理、分析和理解,以識別各種不同模式的目標和對像的技術;特征點的檢測和匹配,則是計算機視覺中非常重要的技術之一。在有紋理和明暗的圖像中,特征點檢測與匹配技術一般利用了圖像的紋理信息構建特征方程而檢測到圖像的特征點的方式進行圖像識別,經典算法有Sift,Surf,Orb等算法。而星圖則有別于一般圖像。星圖是以恒星為觀測目標所獲得的星空圖,有別于一般圖像,他只有一系列的點的明暗,而沒有紋理。直接使用經典算法會報錯,因為使用傳統算法會出現檢測不到特征點的問題。針對星圖的識別方法目前有很多種,近幾十年來,國內外學者在星圖識別算法方面進行了大量的研究,提出了很多星圖識別算法。例如:三角形算法、各種改進三角形算法、金字塔算法、柵格算法、遺傳算法和神經網絡的算法等。但概括起來可以分為兩大類,子圖同構法和模式識別方法。前者以觀測星圖中星點為頂點,星角距作為邊,構造匹配特征或特征組。后者通常由某一個恒星一定鄰域范圍內恒星的幾何分布特征構造匹配特征或匹配組。而在實際用相機觀測星空的時候,往往會發現實際觀測時星空圖有時不完全是沒有紋理的亮點,比如有時會有月亮,有時會有極光,有時會觀測到銀河,還有時為了追蹤目標,會拍到地面。這時就會對我們觀測星空產生一定的干擾。而且極端情況如在特定背景下只能夠觀測到極少星點信息,這時如果使用三角形算法進行匹配識別則會因為星點太少而失敗,而直接使用傳統算法的話如在處理只含有稀疏星點的圖像的時候則會導致匹配失敗,從而導致無法連續的對所拍攝的視頻進行識別處理。為了解決在復雜背景下使星圖圖像匹配,使之達到較理想的方式,本文提出了一種基于描繪輔助線的方式來進行星圖識別,通過在稀疏星點之間描繪輔助線,從而增加稀疏星點區域的紋理信息,進而使該區域可以使用經典算法來檢測特征點,而達到星圖識別的目的。
1基于描繪輔助線的星圖識別方法
1.1星點質心提取
對星圖進行星點提取,實際上是點狀圖像定位技術的應用,是數字圖像處理技術的一個重要內容。星點提取包括星點和背景分離、星點之間的分離、質心定位等處理過程。提取星點質心的方法有很多種,包括基于質心中心的雙正交小波變換法、交叉投影星點提取算法、高斯曲面擬合的質心提取方法;基于灰度的星點定位代表方法為質心法,質心法包括傳統質心法、帶閾值的質心法和平方加權質心法等。其中,高斯曲面擬合法,從星圖成像原理出發,利用高斯函數模擬成像過程的擴展函數模糊效應(PSF),進而進行目標中心定位,該方法是一種較為精確的目標中心定位算法,同時具有較高的穩定性,是目前最為常用的目標質心提取算法。
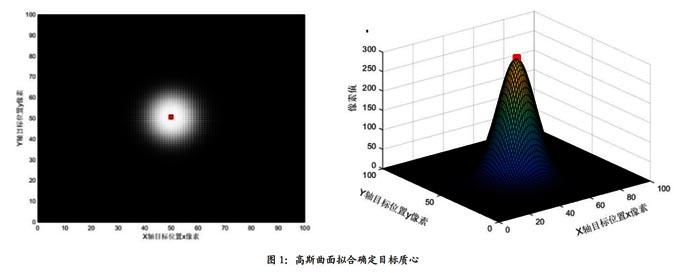
采用高斯曲面擬合方法確定星點質心的前提是:星點在圖像中有較亮的斑點,受傳感器的硬件限制、成像特性以及大氣的干擾等,成像過程具有PSF模糊效應。受PSF模糊的影響,目標表現出從中心四周灰度逐漸降低的彌散效應,如圖1(a),(b)所示:受成像傳感器及成像條件的影響,點目標在圖像中表現為從中心向四周灰度逐漸降低的斑點,圖中紅色斑點為目標位置。高斯曲面擬合方法將成像過程的PSF使用高斯函數擬合,假定f(x,y)為圖像1中位于(x,y)的亮度值,(xo,Yo)為目標中心,則目標的彌散處的像元亮度可用如下模型表示:
式中A為固定系數,可認為等于目標中心亮度值;σ為高斯函數均方差,由成像條件和參數決定,影響PSF模糊效應的程度。利用高斯曲面擬合的方法確定目標質心的過程就是利用目標及其周圍像素通過(1)式分別求解。A、σ以及(xo,yo)。因此至少需要4個目標像素才可求解,一般而言,目標及其彌散的周圍像素多于4個,此時采用最小二乘法求取使得均方誤差最小的參數。最終(xo,Y)就是目標的質心。高斯曲面擬合方法求解目標質心比其他方法具有更高的精度,并且可以定位至亞像素精度。
1.2星間輔助線描繪
先描述輔助線的繪制方法,然后給出結果圖。首先復制一份星圖來處理星點信息。
然后在這份星圖中,通過前文提到的高斯曲面擬合方法確定出星點質心的具體位置(如圖2所示)。
然后遍歷星點,為了保持星圖的尺度不變性,以每顆星的最小星間距的一個固定倍數為閾值,小于該距離的星點與該星進行輔助線的描繪。如圖3所示。
在這里如果每兩顆星之間都描繪輔助線雖然不用對每兩顆星之間的距離進行排序,但這會產生一些問題在兩幅圖星點缺失的時候,描繪全圖輔助線會影響到整幅圖的紋理,從而使星圖的匹配誤差增大。所以,在這里我們采用局部星點輔助線的描繪。當然,如果在匹配的兩幅圖像確定尺度不變的情況下,也可以使用一個固定值(如該圖像對角線的十分之一)用來作為繪制輔助線的閾值,這樣可以提高程序的處理速度。
程序流程如圖4。
1.3基于星間輔助線的星圖匹配
利用繪制輔助線來增加星圖的紋理后,便可利用輔助線的紋理使用典型的圖像匹配算法來給查找星圖的特征點,從而進行匹配。
這里采用OpenCV中提供的FLANN算法結合Surf算法進行特征點提取,最后根據勞氏算法(Lowesalgorithm)對特征點進行篩選,從而得到優秀的匹配點。由圖6可見,各星位匹配情況良好,并且圖片有星點的區域都找到了匹配點。
程序流程如圖5。
這里,使用勞氏算法(Lowesalgorithm)進行優秀匹配點的選擇的時候,通過改變系數可以決定匹配點的多與少,系數則可根據實際情況進行設置。
2實驗驗證
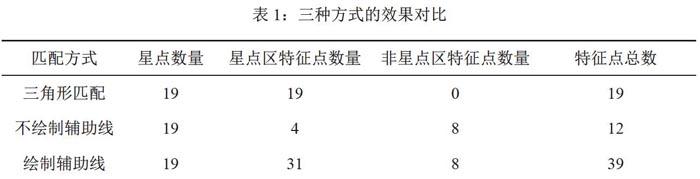
對拍攝到含有月亮及星云的復雜背景情況下的星圖(圖7),對其分別進行三角形匹配(圖8)、不描繪輔助線的圖像匹配(圖9),和描繪輔助線的圖像匹配(圖10)。
如下圖所示,在沒有輔助線的情況下,直接使用Surf算法進行特征點匹配,得到的匹配點少,而且基本集中在月亮周圍,星點周圍基本沒有檢測出來特征點利用三角形算法,可基本將星點檢測出來,但是月亮周圍的細節沒有檢測出來特征點。而利用輔助線之后,由于增加了圖片的紋理信息,使圖像在星點及月亮周圍均檢測出了很多特征點,而且通過勞氏算法進行特征點篩選后,得到的匹配點多而整齊,說明匹配情況良好。表1是對三種星圖匹配方法效果對比。
3結論
通過繪制輔助線的方式使本來沒有紋理信息的星圖可以通過常規的圖像識別算法進行特征點檢測與匹配,同時也解決了復雜候下的星圖識別無法連續的問題,增加了星圖處理的魯棒性。對月亮背景的星圖分別采用了不含輔助線的常規圖像識別算法,三角形圖像識別算法以及含有輔助線的圖像識別算法進行星圖匹配,可看出,使用含有輔助線的圖像識別算法對該圖像進行處理,在星點區檢測到的特征點超過了三角形圖像識別算法檢測到的特征點,在非星點區檢測了與不繪制輔助線的常規圖像識別算法一樣多的特征點,并且匹配線均二平行,說明在復雜背景下,通過繪制輔助線的方式來進行星圖識別,在星點區以及非星點區均能達到較好的匹配效果。
參考文獻
[1]范經偉。快速星圖識別算法設計與實現,碩士學位論文2017,02
[2]李春艷,謝華,李懷鋒等。高精度星敏感器星點光斑質心算法[J].光電工程,2006(03):41-44.
[3] School M S. Experimental demonstration of a star-fieldidentification algorithm. [J]. OpticsLetters, 1994, 33(33): 1120-1124.
[4] Lee H,Bang H. Star PatternIdentification Technique byModified Grid Algorithm [J]. IEEETransactions on Aerospace & ElectronicSystems, 2007, 43(3): 1112-1116.
[5] Hong J, Dickerson J A Neural-Network-Based Autonomous StarIdentification Algorithm [J]Journal of Guidance Control &Dynamics, 2012, 23(4): 728-735.
[6] School MS .Star field identificationalgorithm: performance verificationusing simulated star fields[J]. Proc Spie, 1993, 2019: 275-290.
[7]張廣軍、魏新國、江潔.一種改進的三角形星圖識別方法[J].航空學報,2006, 27(6):1151-1154.
[8]Mortari D , Samaan MA ,JunkinsJL. Los t-in-Space PyramidAlgorithm for Robust Star PatternRecognition[J]. 2001.
[9]魏新國,張廣軍,江潔.基于Log-Polar變換的星圖識別方法[J]光學技術,2006,32(05):678-681.
[10]Wang Guangjun, Fang Jancheng. High ,precision interpolation algorithmfor star pattern[J]. Journal ofBeijing University of Aeronauticsand Astronautics, 2005, 31 (5): 566-569.
[11]Shortis M R,Clarke T A Short TComparison of some techniques for thesubpixel location of discrete targetimages [C]. SPIE, 1994, 2350: 239-250.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
