基于曲線擬合的動目標多源數據融合與處理
2019-07-16 03:14:59尹中秋郭中衛田晗
電腦知識與技術 2019年15期
關鍵詞:關聯
尹中秋 郭中衛 田晗

摘要:目前數據融合技術受到了越來越多的關注,而數據關聯作為數據融合的核心和關鍵技術,在軍用和民用領域中都具有很大應用前景。其中對多傳感器動目標的數據融合是數據融合技術的重要方面。為解決多源數據融合過程中,不同傳感器獲得的大量觀測數據間關聯匹配問題,提出了基于曲線擬合的數據關聯方法。首先對各觀測傳感器的觀測數據進行數據預處理,然后采用一種基于曲線擬合的時間對準算法對不同觀測站數據進行計算,得出不同傳感器的觀測數據間的關聯匹配度,并通過仿真模擬,驗證了該方法的可行性及合理性。
關鍵詞:多源數據;關聯;數據融合;曲線擬合
中圖分類號:TP311 ? ? ? ?文獻標識碼:A
文章編號:1009-3044(2019)15-0008-02
1 研究背景及意義
數據關聯是綜合情報數據處理中十分重要的一個環節,對于僅有一個目標的情況,由于受到各種噪聲雜波等非理想因素的影響,傳感器可能獲得多個量測點跡,有效量測很有可能會認為存在多個目標,這就需要建立起有效量測與目標的對應關系,否則系統就很難判定有效量測來自哪一個目標或者造成虛警信息,這時就需要運用關聯算法來對目標數據進行匹配[5]。數據融合技術起源于軍事領域,在經過了幾十年的發展后,數據融合技術獲得了很多科研成果,并在軍事及民用領域得到了廣泛的應用[6]。
數據關聯過程即確定傳感器接收到的量測信息和目標源對應關系的過程,其中涉及的兩個最關鍵的對象是多傳感器和多目標。因為目標可能處于靜態和動態,由此就有靜態數據關聯和動態數據關聯的劃分,前者主要用于定位,后者則主要服務于目標關聯與跟蹤。本文討論的是目標的動態數據關聯。對動態目標數據的處理,需要對目標位置進行連續的或者沿時間的離散觀測,利用獲得的數據進行動目標的關聯于匹配,在目標跟蹤中具有重要的意義。
2 數據融合建模計算
2.1 關聯關系建模
下面以兩組數據為例進行說明,多組數據的情況與兩組數據類似,為兩組數據的兩兩組合。
a.數據預處理(時間配準):
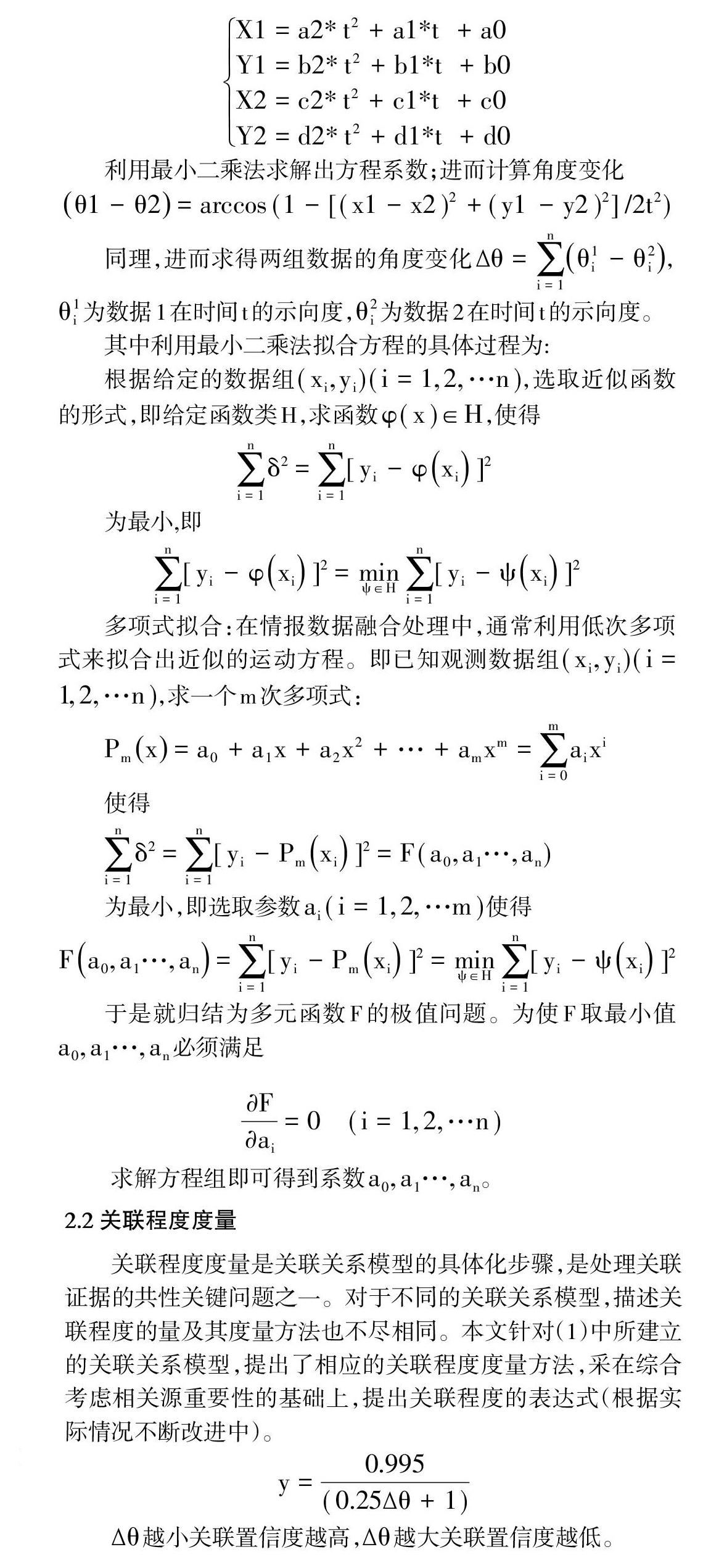
由于各個傳感器的采樣周期不一致,所以獲取觀測數據的時間間隔不統一,故在融合之前需要通過處理將數據的采樣時刻統一到同一時間序列。其基本思想是:選擇其中一個或多個傳感器的測量數據,經過對數據進行曲線擬合得到一條曲線。由擬合后的曲線計算得出其他任意時刻的值,按一定的準則將各傳感器測得的數據進行時間配準,從而,每個傳感器得到一組基于采樣時間的數據。
我們利用取觀測數據得到時間與示向度的數據序列組,利用冒泡法將數據按時間從小到大進行排序得到初始化的數據序列[(ti,θi)(i=1,2,…n)]。
參考文獻:
[1] 何友,王國宏,陸大金,彭應寧.多傳感器信息融合及應用[M].北京:電子工業出版社,2000.
[2] 金國強,趙德興,張宇.目標航跡相關[J].雷達與對抗,1990,(2):92-96.
[3] 王恩平.離散分散系統的次優狀態估計[J].系統科學與數學,1990,(1):84-92.
[4] 何友.多傳感器系統中的航跡合成[J].火力與指揮控制,1990,(1):9-16.
[5] S.L.C.Miranda,C.J.Baker,K.Woodbridge,etal.Knowledge-based resource management formultiftmction radar[J].IEE Signal Processing Magazine,2006,(6):66-76.
[6] 馮洋.多目標跟蹤的數據關聯算法研究[J].西安:西安電子科技大學,2008.
[7] 彭冬亮,文成林,薛安克 ?多傳感器多源信息融合理論及應用[M].北京:北京出版社,2010.2-5.
【通聯編輯:唐一東】
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42
