基于步進電機的位移促動器設計與實測*
2019-07-16 08:21:46張宗猛王正蘭楊德華吳常鋮金振宇
天文研究與技術 2019年3期
關鍵詞:設計
張宗猛,王正蘭,楊德華,吳常鋮,金振宇
(1. 南京航空航天大學自動化學院,江蘇 南京 211106;2. 中國科學院云南天文臺,云南 昆明 650011)
對于中國科學院云南天文臺2 m環形太陽望遠鏡[1-4]主鏡的軸向位置及傾斜姿態的調整和定位,本文設計了一種基于步進電機的位移促動器。位移促動器作為主鏡面的支撐和調節機構,是整個裝置的核心部件之一,是一種精密的直線位移輸出裝置[5-6]。鑒于主鏡面的面形需要達到環形太陽望遠鏡的成像要求,位移促動器需要具有較高的位移輸出精度、大負載能力、高剛度以及毫米級有效行程。在環形太陽望遠鏡的主鏡支撐調整技術中,位移促動器不僅需要實現穩定的位移輸出,而且還要克服或減少摩擦、間隙和空回等不利因素。目前,已經建成的太陽望遠鏡都采用自行研制的位移促動器[7-8]。
針對2 m環形太陽望遠鏡對位移促動器的性能要求,設計一種基于步進電機的位移促動器對主鏡鏡面進行支撐和調節,并對設計的促動器進行性能測試實驗,開展行程及線性度測試、位移促動器開環測試、輸出分辨率測試、空回測試和位移閉環精度測試,獲得了位移促動器的性能指標。
1 位移促動器設計
1.1 位移促動器設計指標
2 m環形太陽望遠鏡的鏡面與傳統的全口徑鏡面的設計指標有所差異,而且環形主鏡對定位支撐系統和姿態調整系統的靈活性和精準性要求更高。表1是2 m環形太陽望遠鏡位移促動器的初步設計指標。
位移促動器要對主鏡起支撐和調整的作用,因此位移促動器最大負荷應大于200 N。為了滿足驅動電機在開環狀態下的行程需要,位移促動器的位移總行程范圍 ±2 mm,還需要滿足位移促動器的校正能力,因此需要輸出位移分辨率不大于1 μm,位移閉環精度不大于1 μm。
表1 位移促動器設計指標要求
Table 1 Displacement actuator designindex requirements
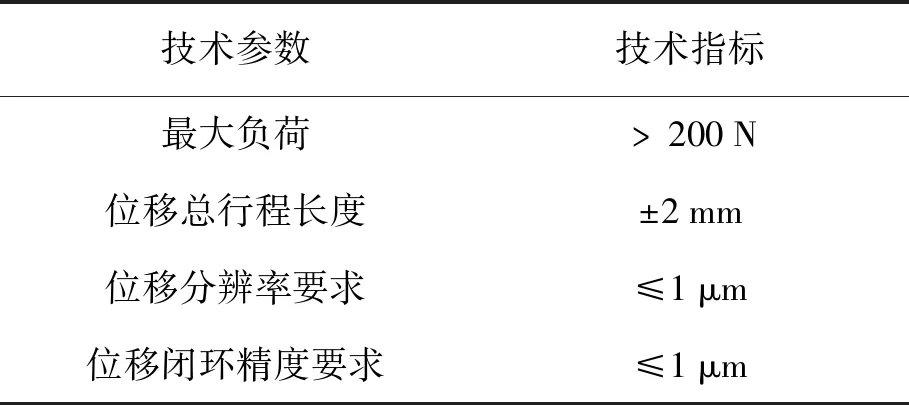
技術參數技術指標最大負荷﹥200N位移總行程長度±2mm位移分辨率要求≤1μm位移閉環精度要求≤1μm
1.2 位移促動器的結構形式
位移促動器輸出位移能同時滿足大行程、高精度、高負載等技術要求,常用的大行程、高精度微位移促動器的結構形式主要有3 種:
(1)位移縮放式。此類微位移促動器的結構形式是在驅動元件后附加位移縮放機構,位移縮放機構主要有減速器、液壓減速機構、精密絲杠和柔性鉸鏈等。對于位移縮放機構的優劣,可以從傳動比、空回、響應速度、負載能力等幾方面衡量。
(2)尺蠖式。尺蠖式微位移促動器是基于 “箝位-驅動-箝位” 的運動形式,以壓電陶瓷、磁致伸縮材料、形狀記憶合金等元件進行驅動。這類驅動元件精度高、響應快,構成的尺蠖式微位移促動器理論上可以獲得無限大的有效行程,但是尺蠖式微位移促動器的控制比較復雜,并且成熟的商品很少。
(3)宏/微動疊加式。宏/微動疊加式微位移促動器分為宏動部分和微動部分,宏動部分完成大行程微米級定位,微動部分完成小范圍的納米級定位。這種促動器的缺點是機械結構和控制系統都較為復雜[9]。
相比(2)和(3)兩種結構形式的微位移促動器,位移縮放式微位移促動器的結構比較簡單,控制也較為方便,通過對驅動元件和位移縮放機構的組合,可以在大行程內輸出較高精度的位移。結合表1位移促動器設計指標要求,此設計的微位移促動器采用位移縮放的結構形式。
1.3 位移促動器設計方案
位移促動器設計圖見圖1(a),為實現高精度控制、微位移校準,采用步進電機集成行星減速器作為核心驅動元件。步進電機和位移促動器外殼均通過法蘭對外聯接緊固在鏡室上。步進電機輸出軸采用緊定螺釘與轉動螺母固連,轉動螺母通過軸承安裝于位移促動器外殼內,與之配合一直動螺桿,牙距1 mm。直動螺桿上段設置有導向機構,這樣就將步進電機輸出的旋轉運動轉換為直動螺桿的直線運動。由于位移促動器內部導桿,步進電機機構不可避免地存在回程間隙、空回等現象,結構設計中加入了一根彈性元件預緊彈簧對軸向直線運動桿件預緊,預緊元件可吸收很大的能量,消除或緩解振動,消除間隙。直動螺桿上端為位移輸出端,安裝了一只拉壓力傳感器作為位移促動器負載的實時檢測元件,并在力傳感器的上端設置位移輸出接口。為實時檢測位移促動器的輸出位移,又集成了一只位移傳感器線性可變差動變壓器(Linear Variable Differential Transformer, LVDT),它的安裝座與位移促動器外殼固連,同時設置了一根橫梁,橫梁的一端與位移促動器輸出接口固連,另一端的下側與線性可變差動變壓器上端球頭觸點接觸。圖1(b)為位移促動器的三維結構圖。圖1(c)為位移促動器的實物圖。
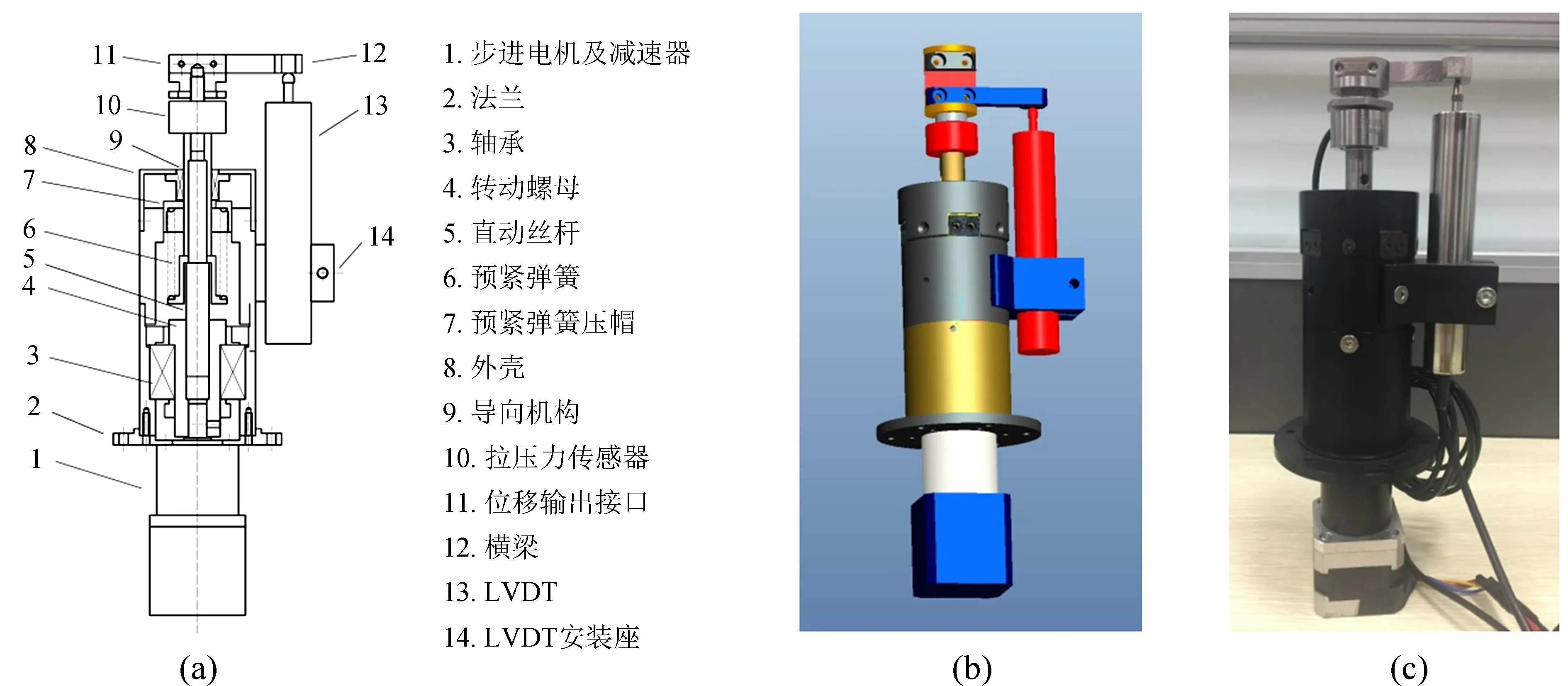
圖1(a) 位移促動器設計圖;(b) 位移促動器三維結構圖;(c) 位移促動器的實物圖
Fig.1(a) Design of displacement actuator; (b) 3D structure of displacement actuator;(c) Physical of displacement actuator
2 位移促動器的性能測試
對位移促動器進行全面的性能測試實驗。實驗過程中,將位移促動器安裝在測試平臺進行實驗。
2.1 行程及線性度測試
由于驅動電機、導向機構存在間隙、空回、摩擦等非線性因素,對位移促動器開展了輸出線性度測試。如圖2,將位移促動器安裝在測試平臺上進行位移促動器線性度檢測。讓驅動電機開環狀態下按設計目標行程(-2~+2 mm)從中間平衡位置開環運行,激光位移傳感器(Keyence H050,測量范圍0~10 mm,線性度±0.02%FS,重復定位精度25 nm)記錄實際全量程輸出位移軌跡,分析線性度,如圖3。

圖2 位移促動器安裝圖
Fig.2 Displacement actuator mounting platform
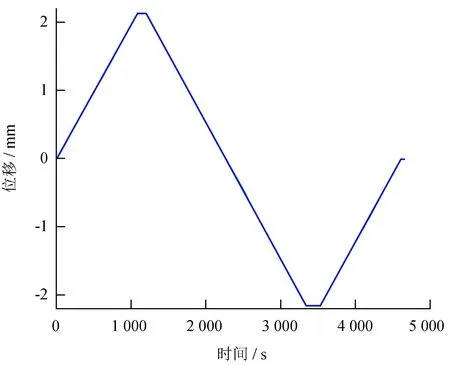
圖3 位移促動器線性度測試曲線
Fig.3 Displacement actuator linearity test curve
測試結果表明,位移促動器可以實現正、反向全量程范圍驅動。線性擬合下殘差的極大值0.015 mm,在全量程范圍內,正、反向輸出線性度良好。
2.2 位移促動器開環測試
因為線性可變差動變壓器的精度直接影響主鏡位置檢測的精度,所以對于線性可變差動變壓器的數值進行標定至關重要。設計選用的線性可變差動變壓器線性誤差輸出為0.5%FS。
實驗中,位移促動器從行程0 mm運動到5 mm處,用線性可變差動變壓器讀取采樣記錄位置的變化情況。位移促動器誤差曲線如圖4,可以判斷螺紋全長上螺距不均勻。

圖4 線性可變差動變壓器標定誤差曲線
Fig.4 LVDT calibration error curve
采用傅里葉擬合,嘗試對位移誤差進行校正補償,擬取誤差位移函數解析式如(1)式。經擬合得到相應各系數如表2。
f(x)=a0sin(0.01x+b0)+c0cos(0.01x+d0)+a1sin(0.012x+b1)+
c1cos(0.012x+d1)+a2sin(0.015x+b2)+c2cos(0.015x+d2)+
(1)
a3sin(0.018x+b3)+c3cos(0.018x+d3)+e
線性可變差動變壓器標定誤差曲線見圖4,殘差極限最大值為0.015 9 mm,最小值為-0.016 2 mm;殘差的均方根為0.006 7。造成這樣的誤差是由于位移促動器開環控制精度不理想,因此要進行閉環控制校正。
2.3 輸出分辨率測試
分辨率測試的目的是測量位移促動器的校正能力,即最小的可控步長。以下通過對位移促動器施加軸向負載,測試拉伸或壓縮情況下位移促動器的輸出分辨率。
(1)軸向施加壓力測試
測試的實驗平臺如圖5。位移促動器在軸向對其施加2 kg負載時輸出分辨率測試曲線如圖6。由圖6可知,位移促動器在負載2 kg時分辨率可以達到0.6 μm步長,實現分辨率小于1 μm的技術要求。
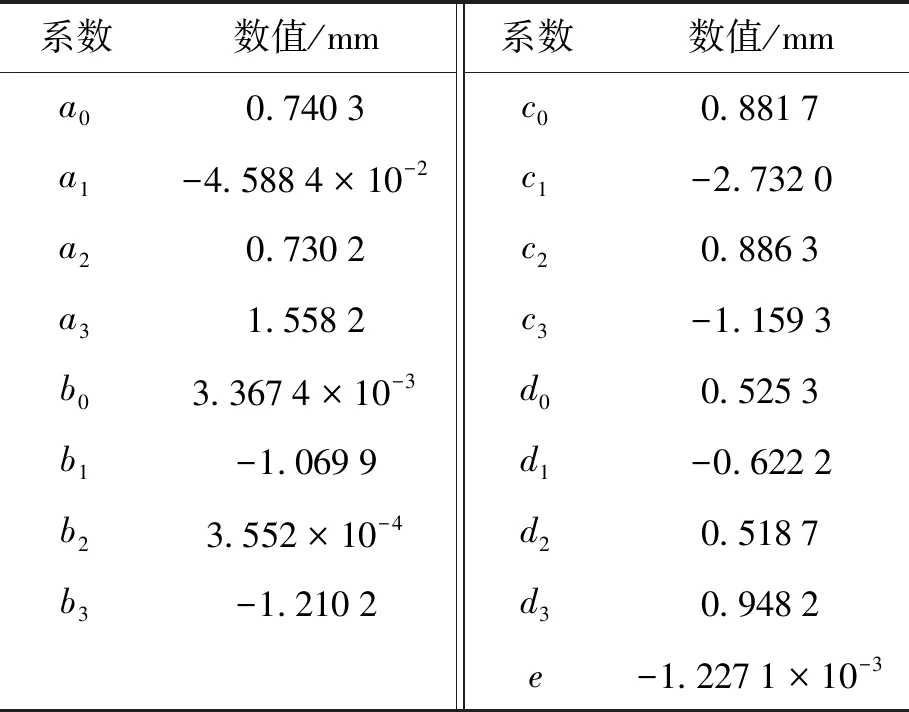
表2 解析式相應系數

圖5 壓力測試實驗平臺
Fig.5 Stress test experimental platform
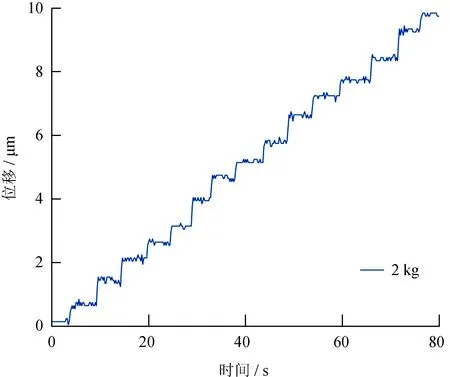
圖6 位移輸出分辨率軸向壓力測試曲線
Fig.6 Displacement output resolution axial pressure test curve
(2)軸向施加拉力測試
對軸向施加拉力測試時構建的實驗平臺如圖7。在1 kg負載下對位移促動器在軸向施加拉力得到輸出分辨率測試曲線如圖8。由圖8可知,位移促動器在施加軸向拉力、負載為1 kg時輸出位移分辨率可達0.4 μm,可以滿足設計指標小于1 μm的要求。
理論上無細分時分辨率為100 nm/step,上述采用二細分處理,由圖6和圖8可知,還可以進行再細分處理。15個單獨步進量所走位移行程不一致是由于電機間隙、摩擦等原因造成。
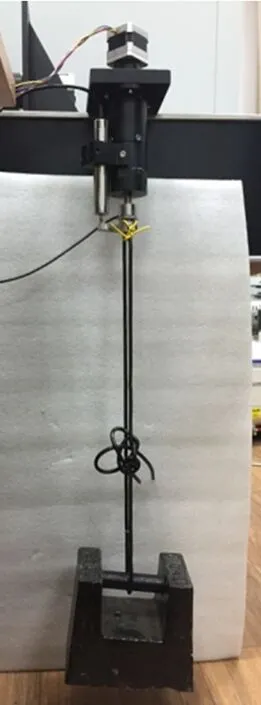
圖7 拉力測試實驗平臺
Fig.7 Pull test experimental platform
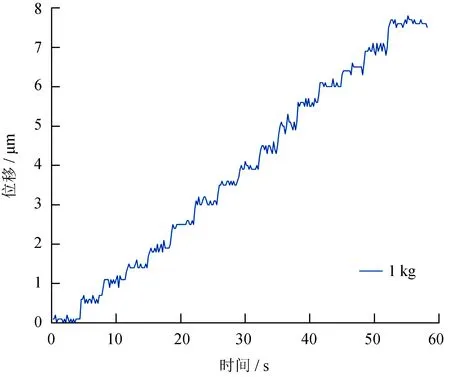
圖8 位移輸出分辨率軸向拉力測試曲線
Fig.8 Displacement output resolution axial pull test curve
2.4 空回測試
位移促動器在2 kg壓力負載下,位于0.1 mm這一點上,發出一個步進脈沖。然后,再從最終位置發出與先前步長和步進次數都相同的反向運動,最終得到位置誤差。得到的空回測試曲線如圖9。由圖9可知,中間位置上方0.1 mm處的位置誤差為4.1 μm,這是由于步進電機中螺紋全長上螺距不均勻和在負載狀況下結構彈性變形造成的。這也說明位移促動器開環控制精度不高,需要閉環控制進行校正。
2.5 位移閉環精度測試
根據2.3節輸出分辨率測試分析可得,位移促動器處于不同軸向拉力、壓力下開環控制分辨率均優于0.6 μm。基于這個結論,開展了位移促動器閉環測試。即輸出目標位移,通過驅動控制系統開環控制電機步進量,線性可變差動變壓器位移傳感器實時監測位移步進量反饋回控制系統與目標位移比對,實現位移閉環輸出。
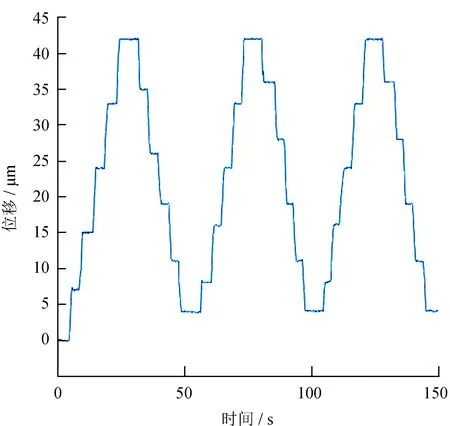
圖9 負載下空回測試曲線
Fig.9 Empty return test curve under load
根據測試,位移促動器能夠實現目標位移閉環輸出精度優于1 μm,符合技術指標要求。
3 結 論
本文設計了一種基于步進電機的位移促動器,并進行一系列性能測試。測試結果表明,該位移促動器輸出位移線性度良好,滿足軸向位移 ±2 mm行程要求,螺紋間隙為5 μm左右。開環控制下的分辨率優于0.6 μm,達到設計指標小于1 μm的分辨率要求。位移閉環精度可以實現技術指標優于1 μm的要求。但螺紋間距不均勻導致開環控制精度不理想,想要達到高精度位移調整與定位,實驗系統仍需采用位移閉環實現校正。測試結果驗證了該位移促動器原理和結構簡單,安裝維護工藝良好,達到設計指標,為2 m環形望遠鏡主鏡軸向支撐和調整提供技術參考。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04