基于改進模糊PI控制器的PMSM矢量控制系統(tǒng)仿真
2019-07-11 07:09:38胡堂清張旭秀
自動化與儀表 2019年6期
胡堂清,張旭秀
(大連交通大學 電氣信息工程學院,大連116028)
近年來,永磁同步電機在工業(yè)領域得到了廣泛應用,小到微特驅動系統(tǒng),大到牽引傳動系統(tǒng)、工業(yè)風機水泵等[1]。永磁同步電機是一個具有非線性、多變量、參數時變等特點的復雜對象[2],在控制系統(tǒng)要求條件比較高時,純粹的采用傳統(tǒng)PI 控制,控制效果往往不理想,容易存在超調量大、系統(tǒng)響應速度慢、轉矩脈動過大等問題,使用模糊PI 控制的系統(tǒng)能有效地改善上述問題,但由于模糊控制規(guī)則的不足,使得普通模糊PI 控制系統(tǒng)仍存在超調量大、轉矩脈動大的問題。
本文提出了一種改進模糊控制規(guī)則,可以輸出更為合理的調整量ΔKp、ΔKi對PI 控制器的參數進行調節(jié),把改進型模糊控制PI 控制器作為電流環(huán)控制器應用到矢量調速系統(tǒng)中,可以實現比普通模糊PI 控制系統(tǒng)和傳統(tǒng)PI 控制更好的控制效果。通過仿真可以看出,應用改進模糊PI 控制器的系統(tǒng)在動、靜態(tài)特性上都要優(yōu)于采用傳統(tǒng)的PI 控制器和普通模糊PI 控制器的系統(tǒng)。
1 永磁同步電機數學模型
本文以表貼式永磁同步電機為例,分析其數學模型。為了便于分析以及建模,做出以下假設:①電動機的三項繞組是完全對稱,并且氣隙均勻;②忽略定子和轉自鐵心飽和影響;③不考慮電機的磁滯損耗、渦流損耗,忽略電機磁飽和現象;
其在同步旋轉坐標系d-q 下的數學模型為
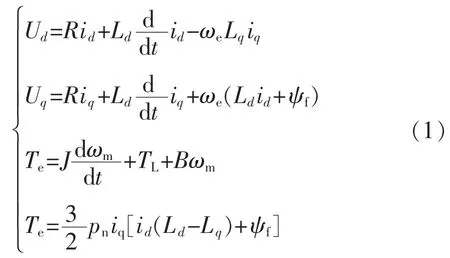
式中:Ud、Uq分別為定子電壓d-q 軸的分量;id、iq為定子電流d-q 軸分量;R 為定子電阻;ψf為永磁體磁鏈;Ld、Lq為直軸、交軸電感;ωe是電角速度;ωm為電機的機械角速度;B 為粘滯摩擦系數;J 為轉動慣量;TL為轉矩負載;p 為極對數[3]。
2 永磁同步電機調速原理
本文中永磁同步電機調速系統(tǒng)采用的是矢量控制方法,其原理是參考直流電機電樞電流和勵磁電流相互垂直、無耦合可以獨立控制的思路,從三項靜止到兩項旋轉坐標系經過一系列的坐標變換,實現了轉矩和磁場的解耦[4]。這樣可以使得永磁同步三項使得交流電機也具有相似于直流電機的特性,是目前采用最多的控制策略。
永磁同步電機矢量控制的本質是通過對定子電流進行控制實現對轉矩控制[5]。目前,主要應用到的控制方法有最大轉矩/電流控制、恒磁鏈控制、id=0控制、恒磁鏈控制、cosφ=1 控制等[6]。在id=0 控制策略中,兩項旋轉坐標系下的直軸分量為0,只有可以控制輸出轉矩的交軸分量,電機所有的電流都用來產生輸出轉矩,使得電流控制效率高[7],所以本文采用id=0 的矢量控制方法。控制系統(tǒng)框圖如圖1所示。
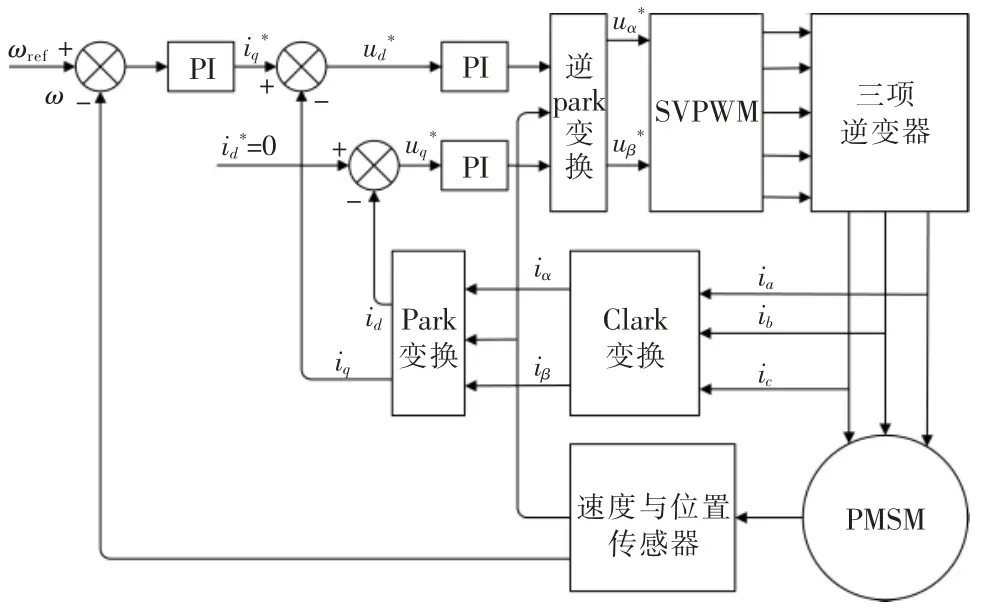
圖1 PMSM 矢量控制系統(tǒng)框圖Fig.1 Structure block diagram of PMSM vector control system
3 永磁同步電機調速系統(tǒng)仿真
3.1 模糊控制器設計
模糊PI 控制是在傳統(tǒng)PI 控制上的改進,通過不斷檢測系統(tǒng)當前的狀態(tài),計算被控制量的差值e和差值變化率ec,并根據改進模糊規(guī)則來進行模糊邏輯推理,在進行去模糊化,把模糊量轉化為精確量對PI 控制器的參數來進行實時的調整,從而使控制系統(tǒng)具有優(yōu)于傳統(tǒng)PI 控制系統(tǒng)的動、靜態(tài)特性[8]。
在改進模糊控制系統(tǒng)中,模糊控制器是其核心,它由4 個部分組成模糊化、知識庫、改進模糊規(guī)則和去模糊化。模糊PI 控制器的原理結構如圖2所示。
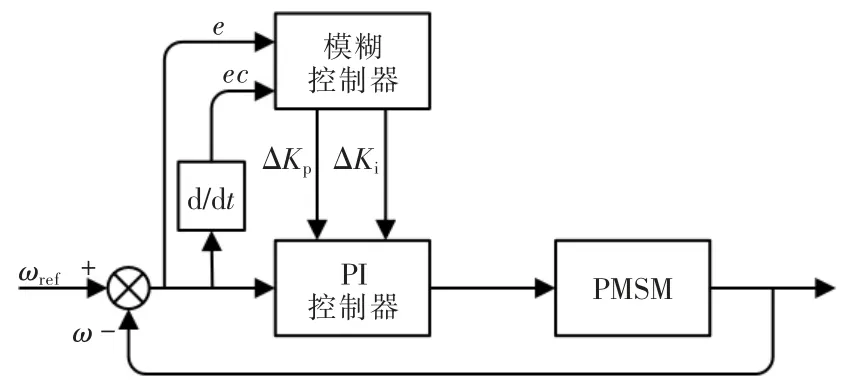
圖2 模糊控制器原理結構Fig.2 Principle and structure of fuzzy PI controller
模糊控制器的輸入必須通過模糊化才能用于控制輸出的求解,因此它實際上是模糊控制器的輸入接口。它的主要作用是將真實的確定量輸入轉換為一個模糊矢量。對于本文的模糊輸入變量e、ec,其模糊子集為{NB、NM、NS、ZO、PS、PM、PB}。
經過采樣得到的e、ec 經過量化因子處理,映射到其對應模糊論域上的某個實數值,這個實數值可能同時與論域上的幾個模糊子集都有關系,求出這個實數值隸屬于各個相關模糊子集的隸屬度,找出與最大隸屬度對應的模糊集合,該模糊集合就代表輸入的模糊化結果。
本文的模糊控制器輸入輸出均為三角形隸屬度函數。

式中:a、c 確定三角形的“腳”,b 確定三角形的“峰”。
規(guī)則庫中存放著模糊規(guī)則,這些控制規(guī)則根據人類控制專家的經驗總結得出。模糊規(guī)則基本結構為If A and B then C and D。其中A、B、C、D 為對應論語中的模糊子集。本文主要是在普通模糊規(guī)則中模糊子集的對應關系作出改進調整。
已有普通模糊PI 調速系統(tǒng)中,e、ec 為NM(負中)說明系統(tǒng)當前轉速與給定值有差值但并不大,ΔKp為PB(正大)、ΔKi為NB(負大),這樣調節(jié)可以使系統(tǒng)增加響應速度快速消除偏差,但是過大的比例系數會使得系統(tǒng)的超調量增加,產生震蕩并且系統(tǒng)的穩(wěn)定性下降。當輸入e、ec 為PM(正中)時系統(tǒng)的轉速給定值大于轉速的實際值,模糊規(guī)則輸出ΔKi為PB(正大)、ΔKp為NM(負中),過大的積分系數可以使超調減弱,減小震蕩,但是同時也延長了系統(tǒng)消除靜差的時間。這樣的模糊控制規(guī)則存在缺陷。
為了解決上述問題,實現保證響應速度的同時并減小超調、震蕩、消除靜差,當偏差以及偏差的變化率不大時,輸出較小的控制量,對比例系數和積分系數微調。因此,本文給出了一種改進模糊控制規(guī)則,輸出可以使系統(tǒng)控制性能提升的調整量ΔKp、ΔKi,避免出現輸入量小輸出的控制量過大的情況,具體的調整規(guī)則如下。
(1)當e 變化時,ΔKp、ΔKi調整規(guī)則為
在e 較大的情況下,應取較小的ΔKi、較大的ΔKp,這樣使得系統(tǒng)避免出現超調量過大,并且加快系統(tǒng)的響應速度;
當e 為中等大時,應當去較小的ΔKi、適中的ΔKp,這樣會使系統(tǒng)在減小超調量的同時還能保證響應速度不會下降。
當e 較小時,取較大ΔKp的和ΔKi來保證系統(tǒng)的穩(wěn)態(tài)誤差盡可能的小;
(2)當ec 變化時,PI 參數ΔKp、ΔKi調整規(guī)則為
當ec 較大時,取適中的ΔKp和較小的ΔKi,使系統(tǒng)在保證響應速度基礎上,避免出現超調過大的現象。
當ec 為中等大的情況下,在原有值的基礎上加大ΔKp、ΔKi,使系統(tǒng)的響應速度、穩(wěn)態(tài)特性能得到保證;
當ec 較小時,取較大的ΔKp和ΔKi用來提高系統(tǒng)的響應速度。
根據上述的調整規(guī)則,制定控制規(guī)則如表1所示。

表1 Kp 的控制規(guī)則表Tab.1 Control rule of Kp
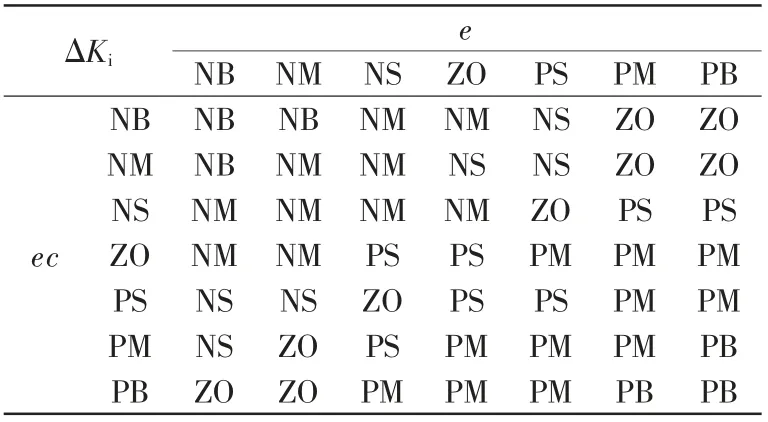
表2 Ki 的控制規(guī)則表Tab.2 Control rule of Ki
模糊控制器的輸出不是確定的數值,而是一個模糊集合,但是PI 控制器需要精確的調整量,這就要進行去模糊化,去模糊化的方法有很多種,本文使用的是面積重心法,重心法具有更平滑的輸出推理控制。即使對應于輸入信號的微小變化,輸出也會發(fā)生變化。
3.2 仿真分析
在Simulink 中搭建了永磁同步電機矢量控制系統(tǒng)仿真模型,轉速環(huán)使用模糊PI 控制器,在Simulink 中使用Fuzzy Logic Controller 模塊建立模糊控制器,仿真模型如圖3、圖4所示。
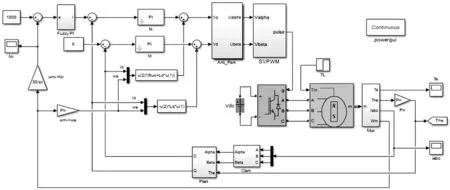
圖3 基于改進模糊PI 器矢量控制系統(tǒng)仿真模型Fig.3 Simulation model of vector control system based on improved fuzzy PI

圖4 模糊PI 控制器的仿真結構圖Fig.4 Simulation structure of the fuzzy PI controller
仿真系統(tǒng)參數:定子電阻Rs=1.958 Ω,轉動慣量J=3×10-3kg·m2,極對數pn=4,定子電感Ld=La=8.5 mH,磁鏈ψf=0.174 Wb;仿真條件設置:參考轉速Nref=1000 r/min,在初始時刻負載轉矩TL=0 N·m,在0.2 s 是負載轉矩為10 N·m。模型的仿真波形如圖5~圖7所示。
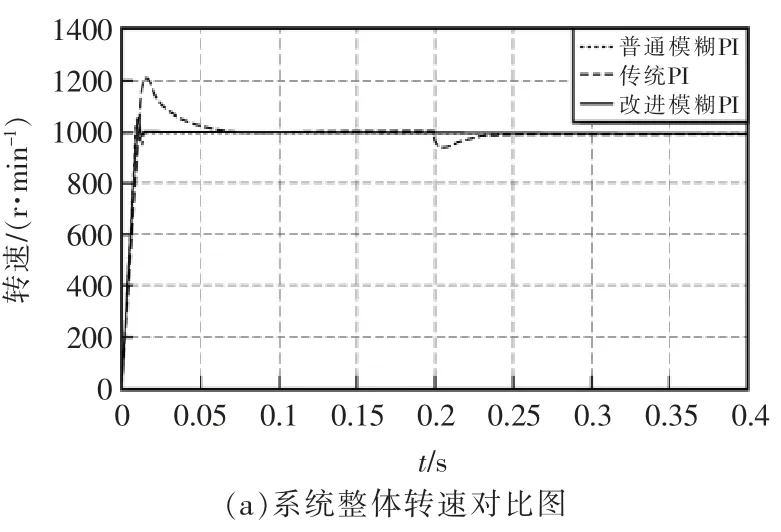

圖5 轉速仿真比較圖Fig.5 Speed simulation comparison diagram
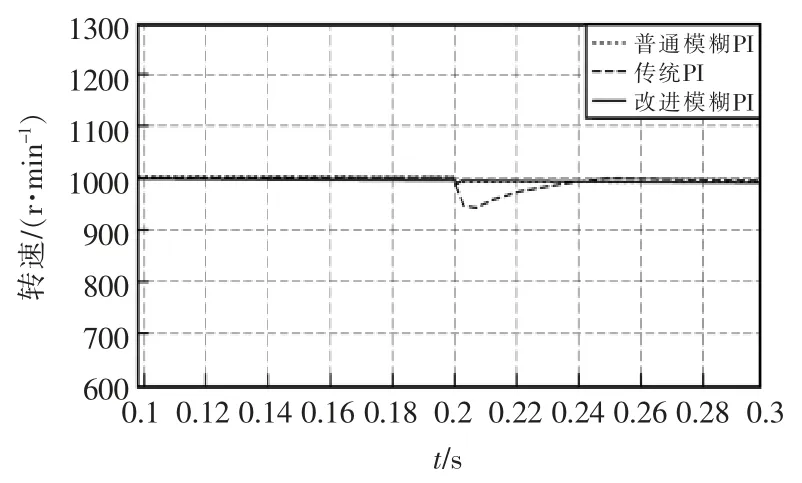
圖6 突加負載時系統(tǒng)的轉速相應曲線Fig.6 Relative speed curve of the system under sudden load
從仿真結果可以看出傳統(tǒng)PI 控制轉速的超調量大,響應速度慢,普通的模糊PI 控制系統(tǒng)啟動時間短,超調量減少,但是系統(tǒng)會出現震蕩,使用改進模糊PI 的系統(tǒng)相較于普通模糊PI 控制系統(tǒng)響應速度加快,并且有更小的超調量,震蕩幅度減小。在0.2 s 加負載后,普通模糊PI 控制可以使系統(tǒng)轉速快速恢復到給定值,明顯優(yōu)于傳統(tǒng)PI 控制,改進型模糊PI 在普通模糊PI 基礎上有更好的恢復性能。應用改進型模糊PI控制器的PMSM矢量控制系統(tǒng)抗干擾能力更強。從圖九的仿真圖看出改進型模糊PI 控制轉矩波動幅度小,當系統(tǒng)突加負載也有轉矩脈動小且能夠迅速到達穩(wěn)定,無明顯的振動。

圖7 轉矩波形圖Fig.7 Torque waveform
4 結語
針對普通模糊PI 控制系統(tǒng)中存在超調量大,震蕩幅度大的問題,本文給出了一種改進模糊控制規(guī)則應用到模糊PI 控制器中,使模糊控制器輸出合理的、對PI 控制器參數進行調整。從仿真結果看出,改進模糊PI 控制系統(tǒng)有較快的響應速度,震蕩幅度減小,增加了系統(tǒng)的穩(wěn)定性,增強了系統(tǒng)的抗干擾能力,達到了很好的控制效果,證明了改進控制規(guī)則達到了對模糊PI 控制器的優(yōu)化。
本文仿真是在理想狀況下進行,要實現PMSM矢量控制系統(tǒng)還需要考慮更多因素,值得下一步的研究。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45