列車軌道曲線擬合算法改進研究?
2019-07-10 08:17:32李衛東高櫻鶯
計算機與數字工程 2019年6期
關鍵詞:模型
李衛東 高櫻鶯
(大連交通大學電氣信息學院 大連 116028)
1 引言
近年來,基于北斗Ⅱ衛星的定位技術憑借著其操作簡便、效率高、精度高的優勢,逐漸成為采集軌道定位數據的主流方式之一[1]。利用軌道電子地圖可視化,車載設備可以了解線路信息[2];列車定位系統可以對定位傳感器的輸出進行校驗,檢測故障;通過地圖匹配,可以有效地校正定位誤差并提高整個系統的完整性;在電子地圖中保存應答器及信號機的信息,可以實現虛擬應答器和虛擬信號機,從而大大降低列車定位系統的成本[3]。因此,擬合高精度軌道曲線數據將對列車定位起到重要作用。
2 軌道定位數據特點
由于鐵路線路往往是沿線穿越城市、平原、高山和河流等,這些環境因素會導致獲取的軌道定位數據出現誤差。利用北斗Ⅱ衛星的定位技術獲取軌道定位數據時,因為衛星的星歷及時鐘的誤差、用戶接收機精度的誤差、電離層信號的傳播延遲及多路徑效應等,使得衛星信號、傳輸信號和地面設備接收的信息均有誤差,所以定位精度僅為0m~10m(95%置信度)[4]。采集的大量基礎數據不可避免地存在誤差及異常,使得測量數據的可靠性和可用性下降。在擬合曲線之前都需要對基礎數據通過人工剔除、采用小波變化去噪、采用卡爾曼分別對多次采集同一軌道數據濾波等方法,方能得到準確的列車位置信息。
針對測量數據構造擬合曲線的常用方法有Fer-guson曲線、三次Bezier曲線及B樣條曲線等[5],在實際應用中這些方法都是只能對一條曲線處理,但在實際生活中的鐵軌往往是橫縱復雜,在交叉軌道處和平行軌道的地方均會有兩條或者兩條以上的線路組成,因此在處理中計算復雜度增加[6]。在本文中采用邏輯回歸改進模型正是利用了數據的誤差特性來實現高精度軌道數據生成,提出在線學習的邏輯回歸改進模型,在同一時間能對多條軌道曲線擬合,在保證精準度的同時降低時間復雜度。在邏輯回歸中,引入二分類概念,將定位位置信息在曲線左邊位置點含有縱軸正誤差,定義為正向類;將曲線右邊位置點含有縱軸負誤差,定義為負向類,通過最速下降法優化加快收斂曲線擬合生成軌道曲線數據,該改進算法不受外界環境影響,在隧道等信號較弱環境中仍然適用的優點[7]。
3 擬合列車軌道曲線數據原理
3.1 軌道曲線數據模型
列車軌跡的生成主要通過歷史定位數據訓練模型,邏輯回歸擬合出一條曲線h,用這條直線對新的定位數據進行預測。其中X 表示歷史定位數據點集,θ表示曲線系數集合。

在邏輯回歸中,首先引入二分類概念,將歷史定位位置信息在標準軌道曲線左邊位置點含有縱軸正誤差ε,定義為正向類;將曲線右邊位置點含有縱軸負誤差-ε,定義為負向類。則因變量y∈{0 ,1} ,其中0 表示負向類,1 表示正向類,利用歷史帶有{0,1}標簽的數據訓練,構造決策函數,構造邏輯回歸模型所做的假設是:

這里的g(h)是sigmoid函數,其數學形式是:

相應的決策函數為y*=1,if P(y=1|x)>0.5,選擇0.5 作為閾值是一個一般的做法,實際應用時根據實際情況可以選擇不同閾值,如果對正例的判別準確性要求高,可以選擇閾值大一些;如果對正例判別準確性要求低,則反之[8]。
由于線性回歸是連續的,可以使用模型誤差的的平方和來定義損失函數求解參數。但是邏輯回歸不是連續的,自然線性回歸損失函數定義的經驗就用不上了。不過可以用最大似然法來推導出損失函數。確定了模型的數學形式后,需要使用最大似然估計,即找到一組參數,使得在這組參數下,我們的數據的似然度(概率)越大,去求解模型中的參數[9]。
按照二元邏輯回歸的定義,假設樣本輸出是0或者1兩類。那么:

把這兩個式子寫成一個式子,就是:

在模型中,似然度可表示為式(6)。

等式兩邊同時取對數可以得到對數似然度:

在本文采用梯度下降法。梯度下降又叫作最速梯度下降,是一種迭代求解的方法,通過在每一步選取使目標函數變化最快的一個方向調整參數的值來逼近最優值。基本步驟如下:
1)選擇下降方向(梯度方向,?J(θ));
2)選擇學習率,更新參數θi=θi-1αi?J(θi-1);
3)重復以上兩步直到滿足終止條件。
其中損失函數的梯度計算方法為

沿梯度負方向選擇一個較小的步長可以保證損失函數是減小的,另一方面,邏輯回歸的損失函數是凸函數,可以保證我們找到的局部最優值同時是全局最優[10]。
3.2 軌道擬合模型改進
對于該算法改進問題,存在多種思路[11],為了求得確定多條列車軌道軌跡(判定邊界),很容易可以從sigmoid 函數看出,當θT X>0 時,y=1,否則y=0。θT X=0 是模型隱含的分類平面,在高維空間中,我們說是超平面。邏輯回歸本質上是一個線性模型,但是,這不意味著只有線性可分的數據能通過LR求解,實際上,可以通過特征變換的方式把低維空間轉換到高維空間,而在低維空間不可分的數據,到高維空間中線性可分的幾率會高一些[12]。
改進算法利用高斯貝葉斯模型先對數據的聯合分布建模,再通過貝葉斯公式來計算樣本屬于各個類別的后驗概率,生成模型和判別模型:
通常假設P(x|y)是高斯分布,P(y)是多項式分布,相應的參數都可以通過最大似然估計得到[13]。在本文中涉及的是正誤差和負誤差定位點數據,只存在二分類問題,通過簡單的化簡可以得到:
其中μ1μ0代表正、負類數據集平均數,σ1σ0代表正、負類數據集方差,如果σ1=σ0,二次項會抵消,我們得到一個簡單的線性關系:
由上式進一步可以得到:

3.3 軌道曲線擬合
在實際應用中,往往只知道北斗衛星定位系統采集的大量基礎數據,不可避免地存在誤差及異常,使得測量數據的可靠性和可用性下降。
1)經過預處理的數據點集作為在線學習輸入,訓練生產軌跡曲線數據模型。
2)先將獲取的列車位置信息根據歷史定位數據訓練模型判斷正負誤差后二分類。
3)通過最速下降法加快收斂曲線擬合,擬合出誤差最小的列車軌道曲線數據。
4 仿真與結果分析
列車軌道擬合準確性是由歷史定位數據準確度和在線學習模型參數共同決定的。其中在隧道等信號較弱的地方獲取的位置信息為缺失或者錯誤信息是整個列車位置估計誤差主要來源[14]。為了驗證算法的有效性及合理性,在本文根據北斗Ⅱ衛星接收機設置2s 接收一次數據[15],以哈爾濱西站的經緯度坐標為起點基準位置,列車實際運行139.86km,列車最高時速200km/h,平均車速為99.90km/h 的條件下,北斗Ⅱ衛星接收機設置2s 接收一次數據,以哈爾濱西站的經緯度坐標為起點基準位置,列車實際運行139.86km,分別采集了3 個歷史時刻的數據組,共1800 個北斗Ⅱ衛星的測量數據點,其中1200 個訓練數據訓練模型,600 個測試數據,過程如下[16]:
1)將測量數據從CGCS2000 坐標系轉換到BJ-54坐標系
我國北斗定位系統采用的是CGCS2000 坐標系,而在實際應用中GIS 數字地圖采用的主要是BJ-54 坐標系[17]。因此,北斗衛星測量的結果不能直接使用,必須經過相應的坐標轉換。本文采用三參數轉換法,將CGCS2000 坐標系統轉換到BJ-54坐標系,其轉換參數可以采用WGS-84 坐標系統到BJ-54 坐標系統的轉換參數,在坐標變換的過程中不可避免的會產生一些誤差,一般認為由坐標轉換帶來的誤差不超過10m[18]。本文將北斗衛星測得的經緯度信息轉換成公里標的結果如表1所示[19]。
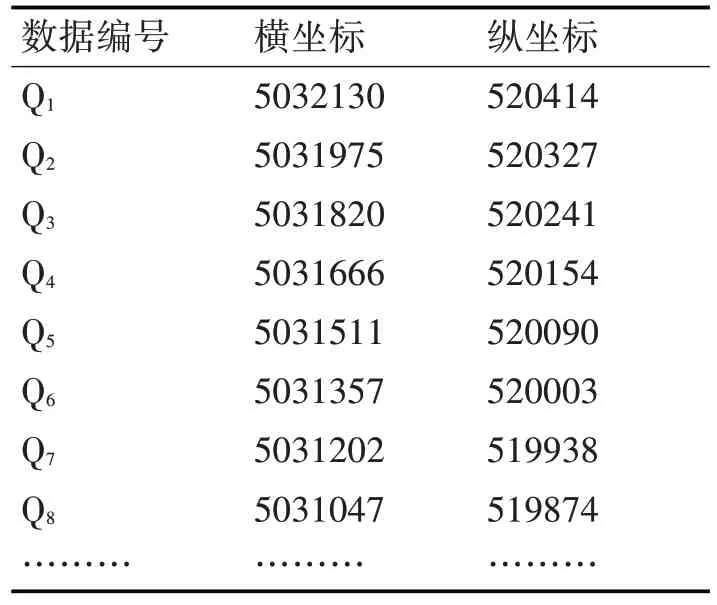
表1 坐標轉換結果
2)BJ-54坐標轉換相同尺度坐標
在面對多維特征問題的時候,為了梯度下降算法更快地收斂,需要通過式(10)保證這些特征都具有相近的尺度[20]。

其中,μn為數組{x1,x2,x3,…xn} 的平均數,Sn為數組{x1,x2,x3,…xn} 的標準差。
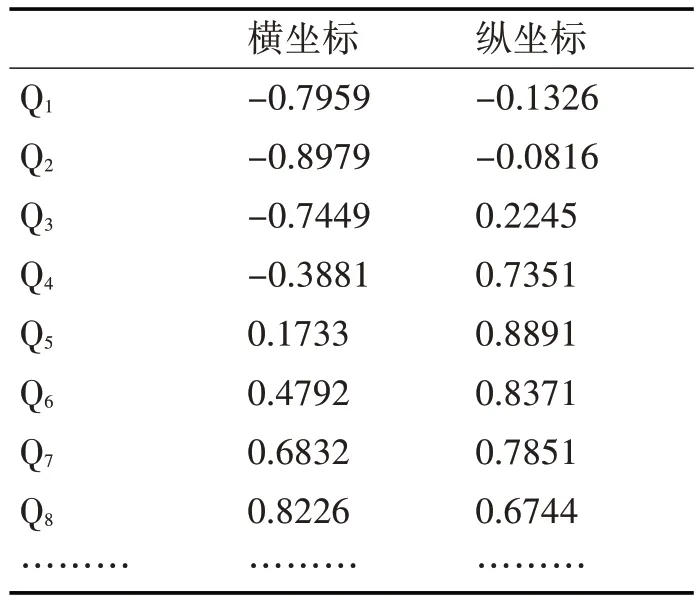
表2 同標準尺度下坐標
4.1 比較改進邏輯回歸模型擬合曲線和邏輯回歸擬合誤差率
首先我們將歷史定位數據通過訓練模型進行二分類如圖1 示,然后通過最速下降法求解參數擬合列車軌道曲線如圖2 所示,并且與未改進算法比較結果如表3所示。
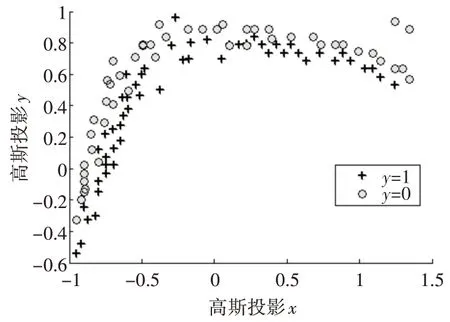
圖1 一般軌道定位數據二分類圖
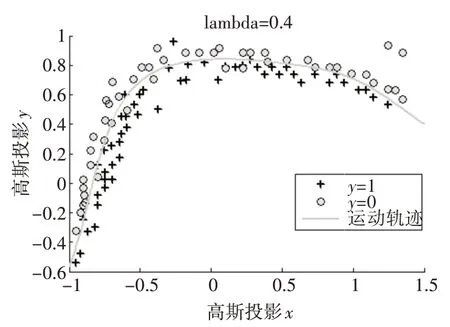
圖2 一般曲線軌道擬合
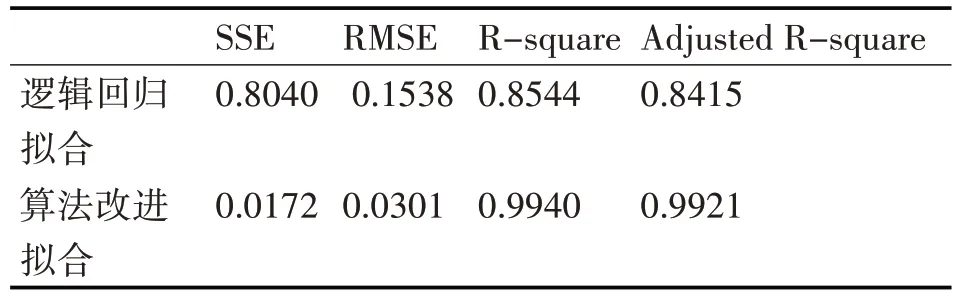
表3 實驗集誤差評價指標
4.2 改進算法對復雜軌道曲線擬合
1)平行軌道擬合
圖3 為平行軌道定位數據二分類圖,圖4 為平行軌跡擬合曲線,從圖5 中我們能看出在線學習方法對軌道擬合準確度可以達到92.5%,步長lambda有效可變范圍是0~0.03。

圖3 平行軌道定位數據二分類圖
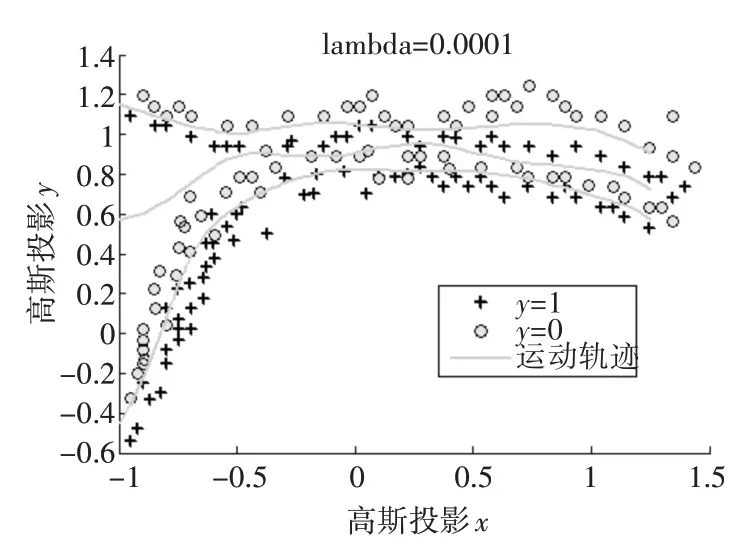
圖4 平行軌道擬合

圖5 在平行軌道擬合中步長lambda大小對機器學習準確率關系
2)交叉軌道擬合
同上,圖6 為交叉軌道的定位數據二分類圖,圖7 為交叉軌道曲線擬合,從圖8 中我們能看出在線學習方法對軌道擬合準確度可以達到93%,步長lambda有效可變范圍是0~0.2。
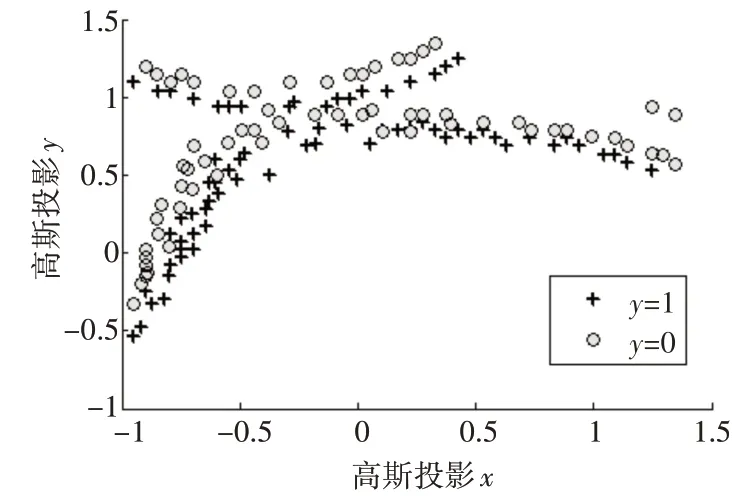
圖6 交叉軌道的定位數據二分類圖
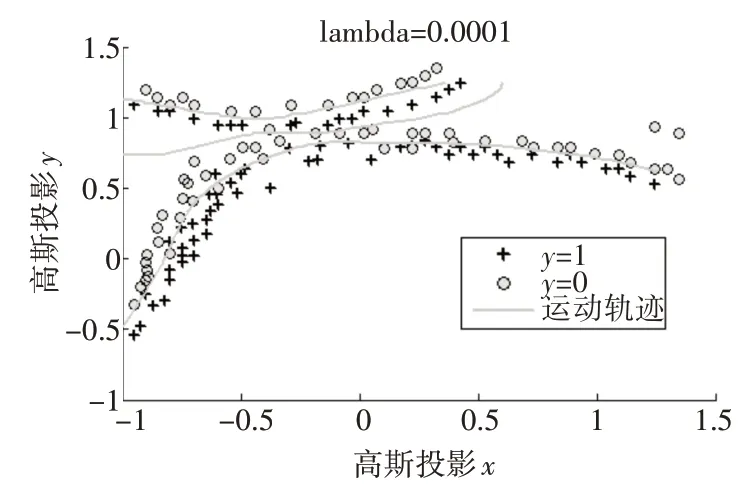
圖7 交叉軌道擬合
從仿真數據及驗證的結果得出:
1)在一般曲線軌道、交叉軌道、平行軌道等復雜情況的可行性;在合理選擇收斂學習率限差,本文算法能夠快速、準確擬合軌道曲線數據,并保證擬合度準確性達到90%以上,在實際應用中有一定價值。
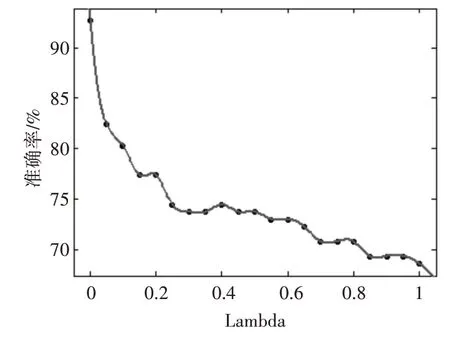
圖8 在交叉軌道擬合中學習率lambda大小對機器學習準確率關系
2)分析得出在兩條曲線以上且相關度越高的情況下,如:交叉軌道、平行軌道,學習率Lambda變化對軌道擬合準確度越敏感,有效變動范圍越小。
3)邏輯回歸改進算法解決了多條曲線擬合問題,簡約了曲線擬合時間復雜度,克服了局部極值;不受外界環境影響,在隧道等信號較弱環境中仍然適用。
5 結語
本文針對采集的歷史定位數據擬合列車定位軌道曲線數據問題,提出改進的在線學習的邏輯回歸模型,通過最速下降法優化加快收斂曲線擬合軌道數據及軌道線路表示。仿真數據驗證結果表明,本文所述算法能夠以較高的擬合精度實現軌道線路描述,且研究學習率Lambda 變化對擬合度的影響,大大降低多條曲線擬合時間復雜讀,為高效高性能的列車定位及列車運行控制提供支撐和保障。在今后的研究方向是將該算法結合GIS(Geographic Information Systems,地理信息系統)技術,生成軌道曲線電子地圖[21]。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19