基于單歷元的三頻整周模糊度確定算法?
2019-07-10 08:17:14沈笑云楊麗萍焦衛東
計算機與數字工程 2019年6期
沈笑云 楊麗萍 焦衛東
(1.天津市智能信號與圖像處理重點實驗室 天津 300300)(2.中國民航大學 天津 300300)
1 引言
2017 年5 月27 日,北斗“一帶一路”應用研討會在上海國家會展中心召開,以推動北斗系統應用與創新合作為目的,其中北斗RTK(real time kinematic)產品在印度的應用在會議上被討論。RTK定位技術被應用于海基精密進近著陸,飛機離艦10 海里范圍內通過數據通信鏈路接收到艦上的觀測值,可通過RTK技術確定飛機位置[1]。當RTK數據通信鏈路范圍在15km 內才能進行精確定位,并且離基站距離越遠,精度越低[2]。超過50km 時,單歷元解一般只能達到分米級的定位精度[3]。RTK是一種采用載波觀測量的相對觀測定位方式,它具有實時的數據傳輸鏈路,使得移動用戶能夠實時地獲得高精度定位結果,而獲得高精度定位結果的關鍵問題是如何快速、正確地固定整周模糊度[4]。
針對整周模糊度解算問題,國內外學者提出了多種方法:如模糊度函數法[5]、最小二乘模糊度搜索法[6]和最小二乘模糊度去相關法[7]等,這些方法均是基于雙差或三差觀測方程解算整周模糊度,其缺點在于至少要知道一個參考站的觀測信息,且其精度受到長短基線的影響[8],解算效率較低。鑒于此原因,基于多頻組合進行周跳探測和模糊度解算的方法應運而生,其中使用最廣泛的多頻組合是Melbourne 和Wubbena 提出的Melbourne-Wubbena組合(MW 組合)和碼偽距/載波相位組合,MW 組合方法可用于周跳的探測與修復[9],碼偽距/載波相位組合方法可用于整周模糊度的確定[10~11]。而采用三頻觀測值能組成更多波長更長、噪聲較小的觀測值;通過依次固定超寬巷、寬巷、窄巷模糊度,可以實現模糊度的快速固定[12]。Hatch R[13],李博峰[14]等研究人員利用模糊度固定后的兩個超寬巷與一個窄巷組合構成無幾何無電離層組合觀測值,然后通過多個歷元仿真數據平滑固定窄巷模糊度,從而實現模糊度的快速固定。高旺[15]等研究了基于三頻無幾何模型的北斗系統網絡RTK 方法,主要實現了超寬巷和寬巷模糊度的準確固定,并且具有較高的解算效率,通過觀測值組合的方法固定模糊度,都存在未對原始頻率進行模糊度固定。鑒于上述問題,應充分利用三頻觀測信息,對三頻整周模糊度解算進行研究。本文基于北斗系統B1、B2、B3三個頻段及GPS 系統L1、L2 兩個頻段的實測數據,在雙頻寬窄巷方法求解模糊度的基礎之上,利用三頻載波相位整周模糊度之間的整數線性關系,提出三頻單歷元零基線整周模糊度確定方法。通過對實測BDS/GPS零基線三頻數據進行計算仿真分析,驗證上述方法的有效性。
2 寬窄巷方法
寬窄巷方法[10~11]也稱MW 組合方法,1985 年由Melbourne 和Wubbena 提出,多應用于GPS 系統周跳探測與修復和確定GPS 系統整周模糊度。為了便于說明確定整周模糊度和周跳探測及修復的方法,先給出載波相位和碼偽距的觀測方程,簡明起見系統誤差僅考慮對流層延遲、電離層延遲、接收機鐘差及觀測噪聲。
載波相位觀測方程為
碼偽距觀測方程為

其中為觀測歷元時刻,為衛星到接收機之間的 長真,f實Li為距載離波,的頻 為率載波相為位接模收糊機度鐘,差,為τS載 為波 時波 鐘鐘差,為對流層折射延遲,為電離層折射群延遲,c為真空中的光速表示北斗系統載波標識(i=1,2,5),j為接收機標識,l為衛星標識。
根據式(1)和式(2)分別寫出L1和L2載波相位觀測值及L1與L2載波上碼偽距觀測值觀測方程的顯示表達式:

令寬巷組合觀測值為

則對應的寬巷組合觀測值的模糊度為

令窄巷組合觀測值為

則對應的窄巷組合觀測值的模糊度為
由寬巷窄巷組合觀測值的模糊度可得兩個頻率的模糊度:
3 本文方法
由于寬窄巷方法只能處理雙頻觀測數據的缺點,本文提出的算法在寬窄巷方法基礎之上,引入第三個頻率的偽距觀測方程和載波觀測方程,根據式(3)和式(5)分別補充寫出L5載波相位觀測值及載波碼偽距觀測值觀測方程的顯式表達式:

令與頻率無關的總誤差總和為Δρ,則衛星到接收機之間的距離ρ'=ρ+Δρ。根據式(3)和式(5)可以得到:
根據式(9),L1和L2的寬巷組合,L1和L5的寬巷組合分別為
通過式(3)~(6),式(15)~(18)解得三個頻率的整周模糊度分別為
由此得到單頻載波的整周模糊度值。
此方法充分利用了觀測方程,且易于程序實現,消除了衛星鐘差和接收機鐘差的影響,衛星星歷誤差和大氣延遲誤差的影響也得到大幅度的削弱。此方法也可以應用與GPS 雙頻系統確定整周模糊度,可將第三頻率的偽距和載波觀測信息記為零,視為本文算法的一個特例。
4 實驗驗證與分析
利用兩臺多系統多頻點接收機于司南導航上海市閔行區實驗中心(北緯31.174300603°,東經121.387866640°)與2014 年7 月9 日采集一組GPS/BDS/GLONASS 三星零基線靜態數據,采樣間隔10s,數據長度約2h。觀測的實際運行衛星的原始觀測數據為例進行實測數據分析,驗證本文推導的整周模糊度解算的正確性,利用不同接收機接收到的衛星信號實測瞬時多普勒數據,得到積分多普勒值,然后通過衛星信號原始載波相位變化值和偽距觀測值,給出GPS系統和北斗系統整周模糊度和周跳數的實驗結果。
4.1 實驗參數
表1 為BDS/GPS 系統信號實驗環境的主要技術參數。
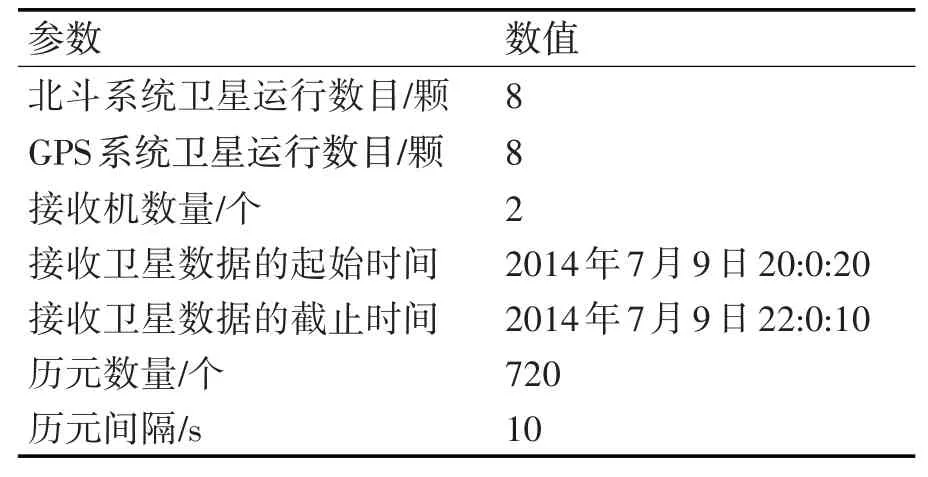
表1 實驗參數
4.2 實驗結果
4.2.1 整周模糊度固定
圖1(a)、(b)分別為GPS 系統G25 衛星利用寬窄巷法在接收機802182 在L1,L2 載波上的整周模糊度隨歷元變化曲線,(c)、(d)表示在接收機802443在L1,L2 載波上的整周模糊度隨歷元變化規律曲線。圖中選取了720個歷元的整周模糊度值。圖2為兩個接收機在L1載波上的整周模糊度差值。
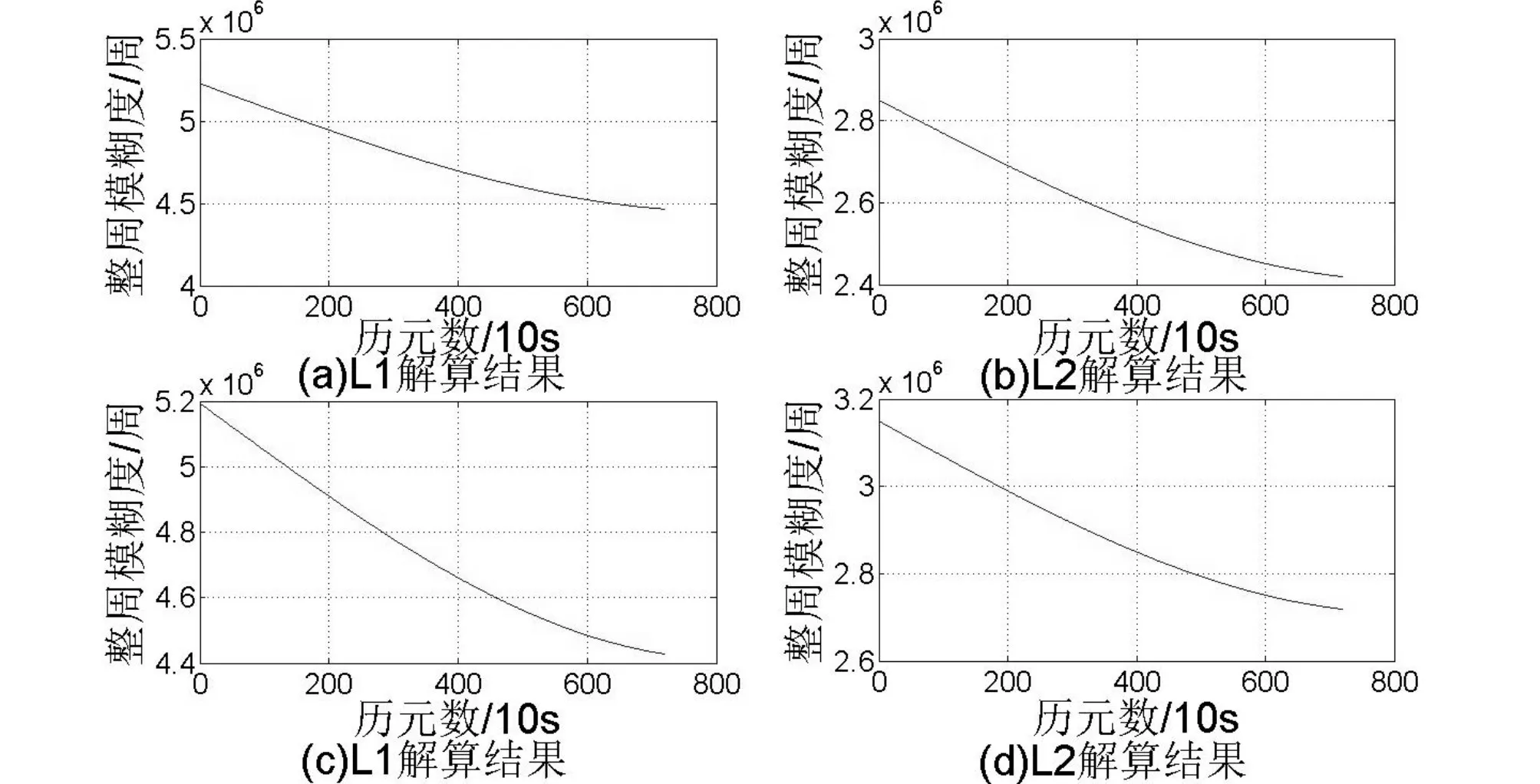
圖1 G25衛星寬窄巷法求解整周模糊度
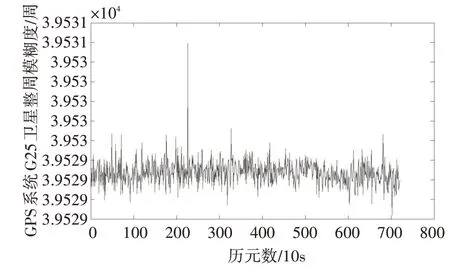
圖2 G25衛星寬窄巷法求解L1載波模糊度差值
圖3 為北斗系統C04 衛星利用寬窄巷法分別在接收機802182和接收機802443兩個載波上的整周模糊度隨歷元變化規律曲線,其中(a)表示接收機802182 上B1 載波的整周模糊度曲線,(b)表示接收機802182上B2載波的整周模糊度曲線,(c)表示接收機802443 上B1 載波的整周模糊度曲線,(d)表示接收機802443 上B2 載波的整周模糊度曲線。圖中選取了720個點的整周模糊度值。圖4為兩個接收機在B1載波上的整周模糊度差值。與圖1所示的GPS系統G25衛星對應的整周模糊度差值曲線的趨勢相似,說明在接收機放置地點此采樣數據時段接收到的北斗數據性能與GPS大致相同。

圖3 C04衛星寬窄巷法求解整周模糊度
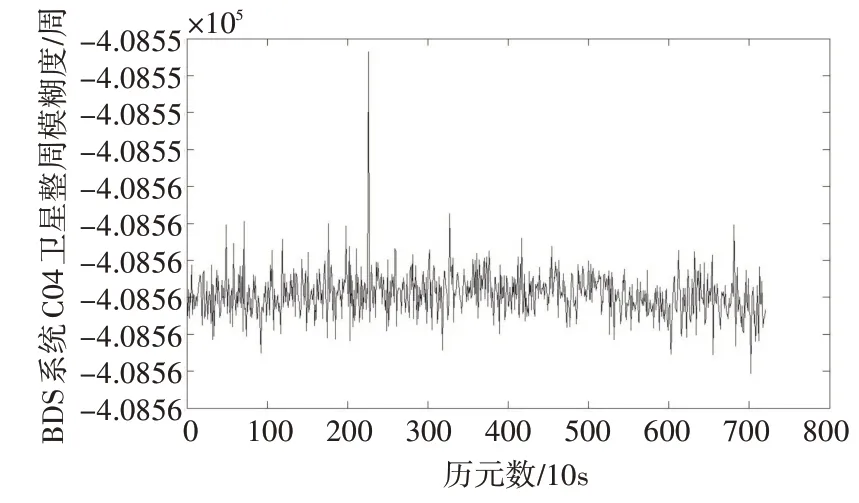
圖4 C04衛星寬窄巷法求解B1載波模糊度差值
圖5 分別為GPS 系統G25 衛星利用三頻模糊度分解法分別在接收機802182和接收機802443兩個載波上的整周模糊度隨歷元變化規律曲線,其中(a)表示接收機802182 上L1 載波的整周模糊度曲線,(b)表示接收機802182上L2載波的整周模糊度曲線,(c)表示接收機802443上L1載波的整周模糊度曲線,(d)表示接收機802443上L2載波的整周模糊度曲線。與圖1 所示的GPS 系統衛星利用寬窄巷法解算各載波整周模糊度值基本相近,可驗證本文中的三頻模糊度分解算法合理。
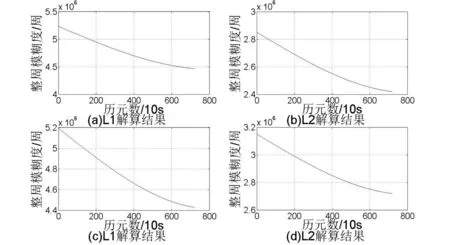
圖5 G25衛星三頻模糊度分解法求解整周模糊度
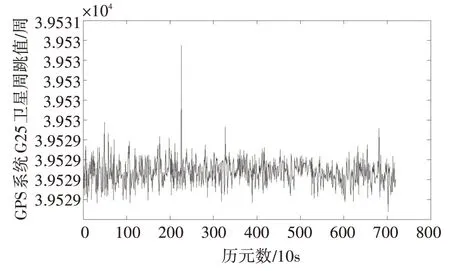
圖6 G25衛星本文方法求解L1載波模糊度差值
圖7 為北斗系統C04 衛星利用三頻模糊度分解法分別在接收機802182和接收機802443兩個載波上的整周模糊度隨歷元變化規律曲線,其中(a)、(b)、(c)表示接收機802182 上三個載波的整周模糊度曲線,(d)、(e)、(f)表示接收機802443 上三個載波的整周模糊度曲線。圖8 為兩個接收機在B1載波上的整周模糊度差值,與圖9 所示的GPS 系統G25 衛星對應的整周模糊度差值曲線的趨勢相似,也可以說明在接收機放置地點這個時間點接收機接收北斗衛星性能與GPS 衛星性能大致相同。與圖4、5、6 所示的利用寬窄巷法解算北斗系統衛星各載波整周模糊度值基本相近,可驗證本文提出的三頻模糊度分解算法與寬窄巷法求解模糊度的差別在于可以快速同時求解出三個載波整周模糊度值。
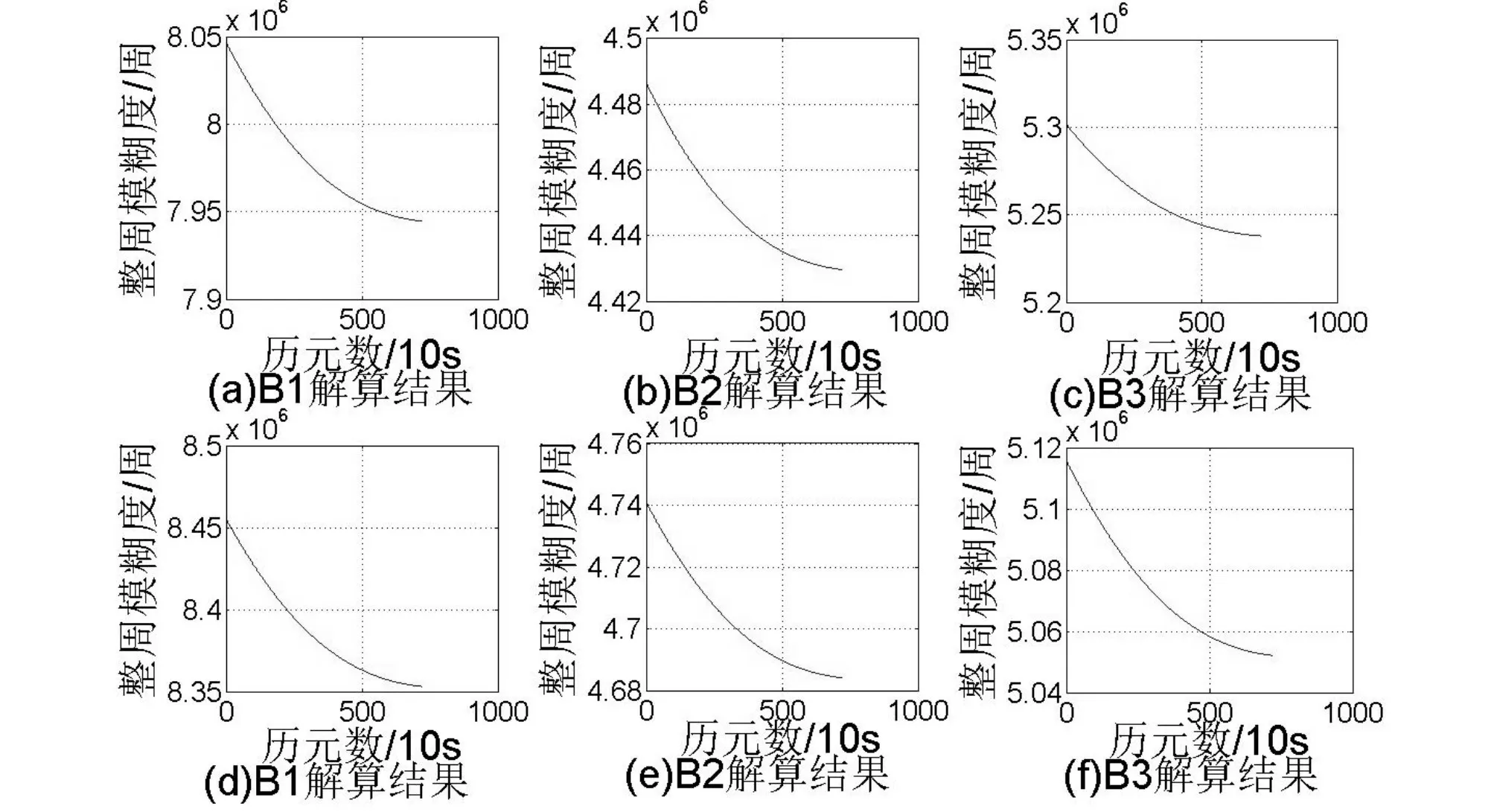
圖7 C04衛星本文方法求解整周模糊度
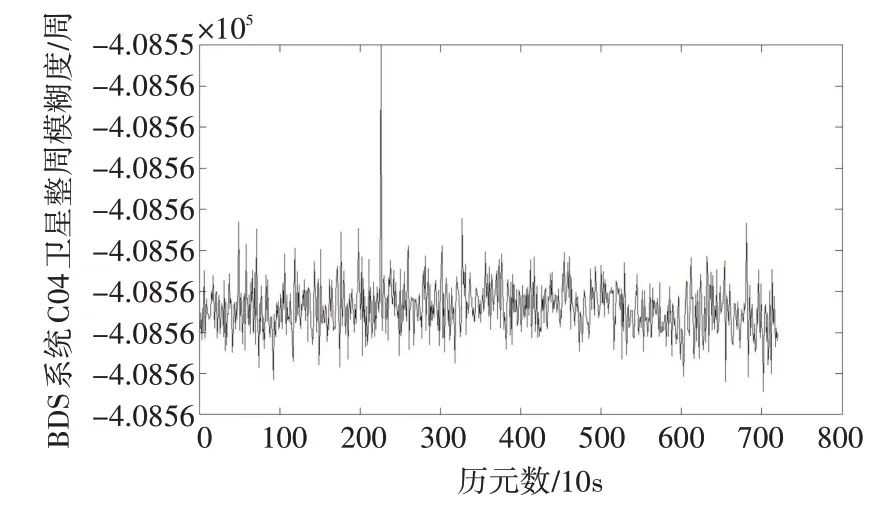
圖8 C04衛星本文方法求解L1載波模糊度差值
4.2.2 周跳檢測
圖9 為GPS 系統G25 衛星利用三頻模糊度分解法分別在接收機802182和接收機802443兩個載波上的周跳數隨歷元變化規律曲線,其中(a)、(b)、(c)表示接收機802182 上三個載波的周跳曲線,(d)、(e)、(f)表示接收機802443上三個載波的整周跳曲線。圖10為兩個接收機在L1載波上的周跳數差值。由圖可以看出,GPS系統G25衛星L1載波上的周跳數比L2 載波上的周跳數更多;兩個載波上大部分歷元周跳數均在311~1433 周之間變化;兩個接收機同時接收衛星數據雖然同一載波上整周模糊度差值較大,但計算出周跳數差值在大部分歷元中不足0.5周的差值。
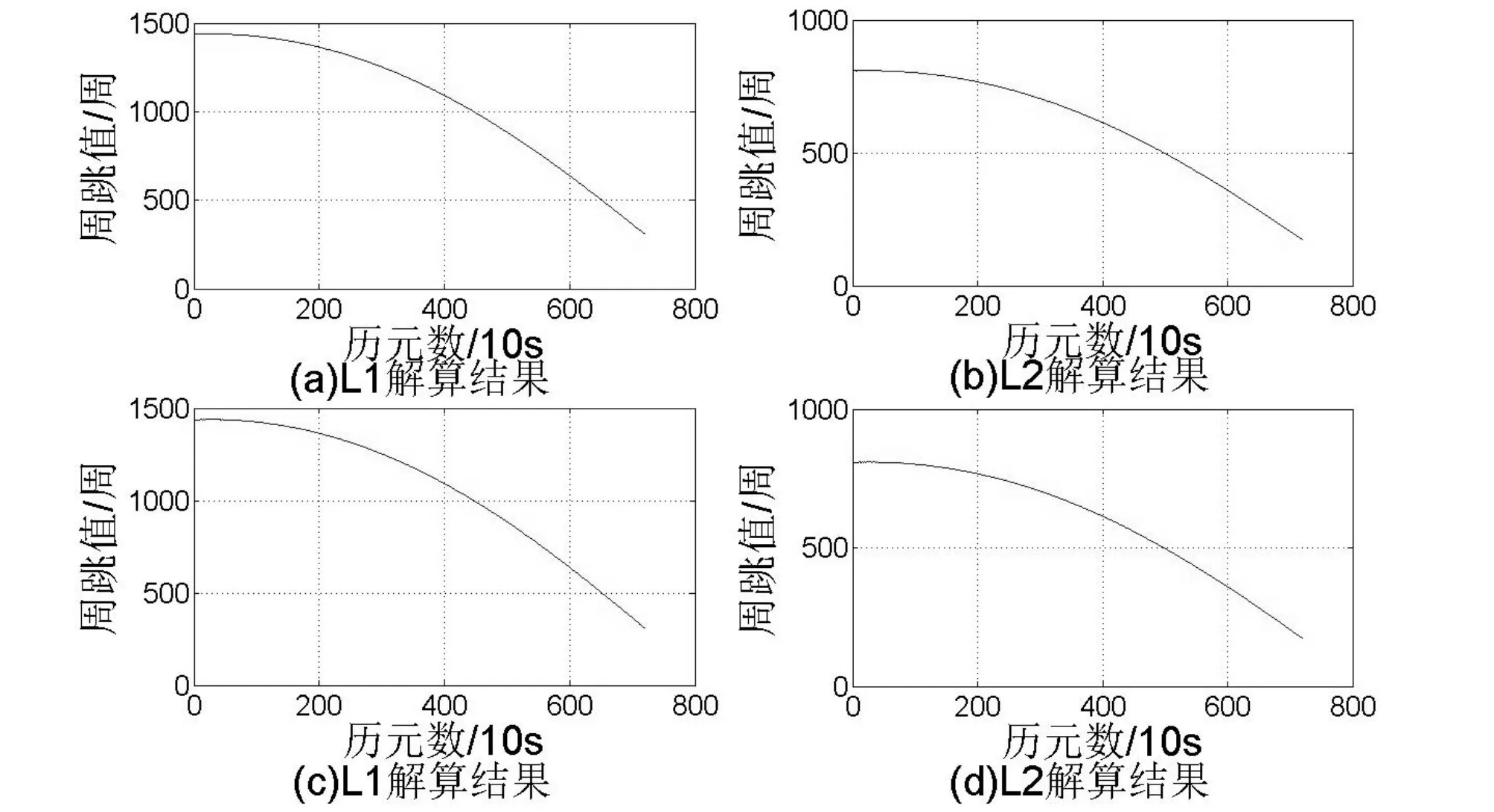
圖9 G25衛星本文方法求解周跳數曲線
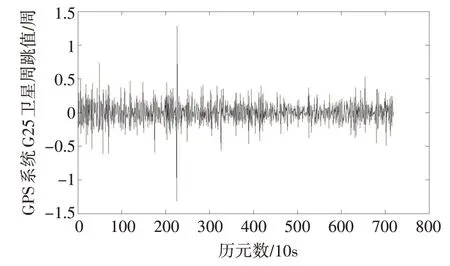
圖10 G25衛星本文方法求解L1周跳數差值
圖11 為北斗系統C04 衛星利用三頻模糊度分解法分別在接收機802182和接收機802443兩個載波上的周跳數隨歷元變化規律曲線,其中(a)、(b)、(c)表示接收機802182 上三個載波的周跳曲線,(d)、(e)、(f)表示接收機802443上三個載波的周跳曲線。圖12 為兩個接收機在B1 載波上的周跳數差值。由圖可以看出,北斗系統C04 衛星B1 載波上的周跳數比其他兩個載波上的周跳數更多;三個載波上大部分歷元周跳數均在5~12 周之間變化;兩個接收機同時接收衛星數據雖然同一載波上整周模糊度差值較大,但計算出周跳數差值在大部分歷元中不足0.5周的差值。
本文只給出802182和802443接收機的北斗系統C04 衛星和GPS 系統G25 衛星的整周模糊度曲線和周跳數曲線。其他北斗GEO 衛星的兩種曲線性質均與C04 衛星一致;其他GPS 衛星的兩種曲線性質均與G25衛星一致,故不再一一贅述。通過比較圖11 和圖9,在數據采集地區,北斗系統GEO 衛星的周跳值明顯小于GPS衛星的周跳值,表明在該地區北斗系統GEO衛星性能好于GPS衛星。
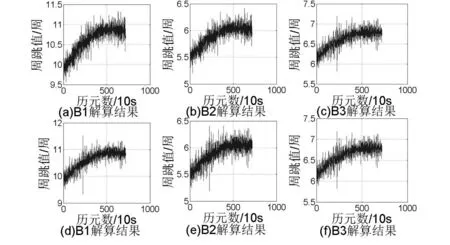
圖11 C04衛星本文方法求解周跳數
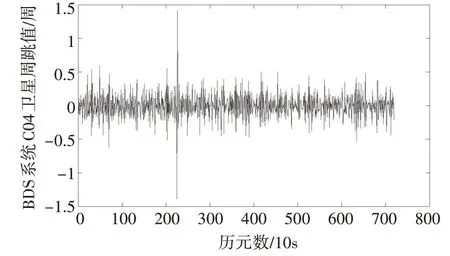
圖12 C04衛星本文方法求解L1載波周跳數差值
表2 中信息為兩個定位系統利用兩種方法計算整周模糊度的成功率。由于北斗系統的廣播星歷軌道精度較低,觀測值的噪聲較大,在進行整周模糊度固定的成功率明顯要低于GPS 系統。GPS系統兩個頻率L1,L2,在利用三頻方法進行整周模糊度解算,對于整周模糊度固定沒有影響。北斗系統利用三頻方法求解整周模糊度成功率明顯好于利用寬窄巷方法所求解的整周模糊度。表3 為利用兩種方法分別計算北斗系統和GPS 系統相同歷元數的整周模糊度求解花費的時間,利用三頻方法計算北斗系統或GPS 系統整周模糊度在時間效率上均好于寬窄巷方法。

表2 模糊度固定成功率

表3 計算模糊度時間開銷
5 結語
通過仿真驗證了本文方法的正確性,表明對零基線三頻數據的三頻模糊度分解法快速解算載波相位的整周模糊度是可行的;三頻模糊度分解法具有更好的固定成功率以及計算效率;在相同地點相同時間不同接收機對同一衛星計算載波整周模糊度結果不同,從而對衛星導航定位的精度產生很大影響。基于本文的研究結論,可將三頻模糊度分解法運用于整周模糊度及周跳的快速求解,進行RTK的模糊度初始化結果驗證,從而進行動態相對定位。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12