光纖預警系統在清管器軌跡監測中的應用
2019-07-05 11:21:04茍武侯張路李國相
石油化工自動化 2019年3期
關鍵詞:振動
茍武侯,張路,李國相
(1. 北京航天易聯科技發展有限公司,北京100176;2. 中國石化銷售華中分公司,湖北武漢430070)
隨著管道運輸業的迅速發展,管道傳輸距離不斷增加,為了確保管道的清潔,降低腐蝕性物質對管道內壁的腐蝕損傷,石油、天然氣等輸送管道需要定期清潔及維護[1],所以清管器的工作狀態、實時定位監測是管道管理部門非常重視的內容。由于管道清理過程中出現的清管器故障、卡阻等現象直接影響管道的安全運行,必須及時定位事故點并采取必要的應急措施,因此對清管器移動軌跡的監測具有重要的實際意義[2-5]。
常見的清管器跟蹤定位技術包括聲波檢測法、電磁感應法、放射性同位素法、機械法、壓力脈沖法等[6-9],但常規的定位方法在實時定位和定位精度等問題上存在一定難度。本文介紹的光纖預警系統在清管器實時監測中的應用,實現了清管器工作過程中的實時定位與軌跡跟蹤。光纖預警技術已經逐步成熟[10-14],在長距離油氣管道監測中的安全防護作用顯著,同時降低了人工、管道安全維護及能源運輸成本[15-17]。
文中列舉的管道清管器在固定的時間間隔內對管道疏通清潔[18],以保障輸油的通暢,常見的清管器外形如圖1所示。

圖1 常見的清管器外形示意
1 光纖預警系統原理
光纖預警系統主要由分布式光纖傳感器、光源及數據采集模塊、數據處理計算機等組成,系統結構如圖2所示[19-21]。清管器在管道內工作時會產生一定幅度振動信號,該振動信號可以被同溝敷設在管道附近的分布式光纖傳感器捕捉,采集的信號經光源及數據采集模塊處理后上傳至數據處理計算機,由計算機對采集的信號做進一步的檢測、識別、處理,實現了對清管器的實時監測。

圖2 光纖預警系統結構示意
1.1 定位原理
光纖預警系統基于背向瑞利散射原理,由光源模塊持續將光脈沖注入分布式光纖傳感器的首端,通過光電探測模塊探測返回首端的瑞利散射光,當清管器在某個位置發生振動時,分布式光纖傳感器對應位置的折射率發生變化,使該處光相位發生偏移,由于干涉作用,相位的偏移將引起背向瑞利散射光光強發生變化。
通過光電探測模塊探測返回首端的瑞利散射光,經放大電路及模/數轉換模塊,將模擬信號轉換為數字信號后,上傳至數據處理計算機內對信號做進一步的處理。系統光脈沖重復頻率為1 kHz,采集卡采集頻率為20 MHz,采集到的振動信號為32位浮點數據,通過預處理提取每秒的數據信號特征。
1.2 定位距離的計算
圖2中清管器產生的振動作用在分布式光纖傳感器上,由于干涉作用,會對背向瑞利散射光的光強進行調制,通過記錄光脈沖發射和接收到振動的時間差,可以實現清管器位置的定位,光纖預警系統的定位距離可以由式(1)求得:
L=ΔTv/2
(1)
式中: ΔT——光脈沖發射和接收到振動信號的時間差,s;v——光在光纖中的速度,v=c/λ;c——光在真空中的速度,m/s;λ——光纖折射率。
采集卡采集到的背向瑞利散射光的強度IB如式(2)所示[22]:
IB=I0Fvαsτ{1+cos[Φ+Bf(t)]}
(2)
式中:I0——光纖首端注入的光脈沖強度;F——散射光返回入射方向的比例;аs——瑞利散射系數;τ——發射光的光脈沖時間寬度,μs;Ф——光脈沖上升沿與下降沿的相位差;B——干擾系數;f(t)——外界振動干擾。
由式(2)可知,IB與f(t)具有直接關系,因此通過相關處理可以實現清管器探測及準確定位。
2 光纖預警系統清管器軌跡監測效果驗證
2.1 清管器監測實例
本文以華中某區域A站至B站的光纖預警系統監測數據為基礎,介紹監控區域輸油管道內清管器工作軌跡監測案例。在A站和B站各部署了1套光纖預警系統,監測A站至B站的管道。
2018年7月9日,A站工作人員在管道出站首端投放1臺清管器,對管道實施清潔作業;在B站管轄范圍沿線設置了多個人工監測點,用于監測清管器經過的時間及準確位置;同時工作人員通過光纖預警系統跟蹤定位清管器的移動軌跡,對比分析光纖預警系統對清管器的定位誤差。
B站工作人員從2018年7月10日0時起開始監測清管器的位置信息,在6個固定跟蹤點對清管器進行監測,工作人員監測的位置信息與光纖預警系統監測到的位置信息見表1所列。
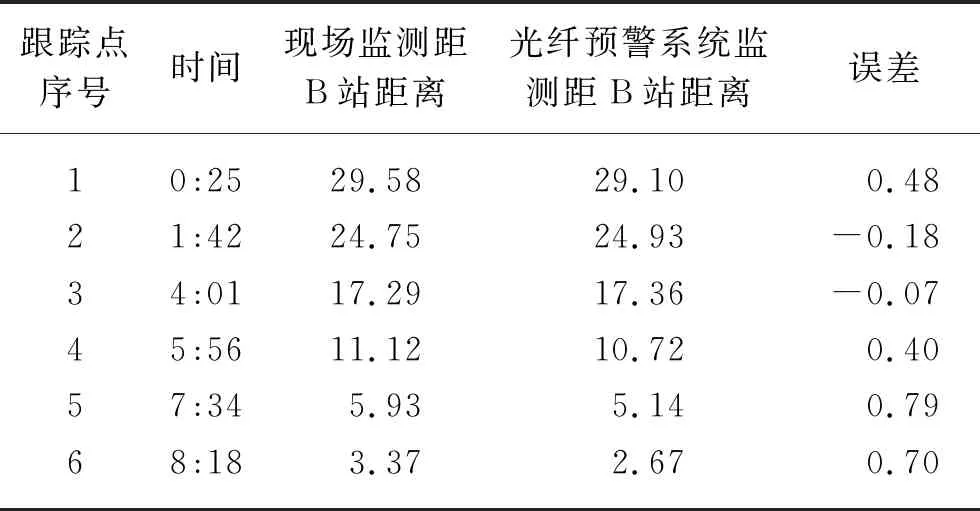
表1 清管器的監測位置信息 km
表1中現場監測結果為清管器距B站的實際距離,將光纖預警系統監測位置與實際監測位置對比,光纖預警系統的定位誤差曲線如圖3所示,同時得出以下結論:
1)對于指定的多個監測點,光纖預警系統均可以準確地監測到清管器的位置。
2)清管器的移動位置與時間具有較好的線性關系,清管器在管道內基本以勻速移動。
3)光纖預警系統監測到的清管器位置與實際監測點的定位誤差較小,均控制在1 km以內。
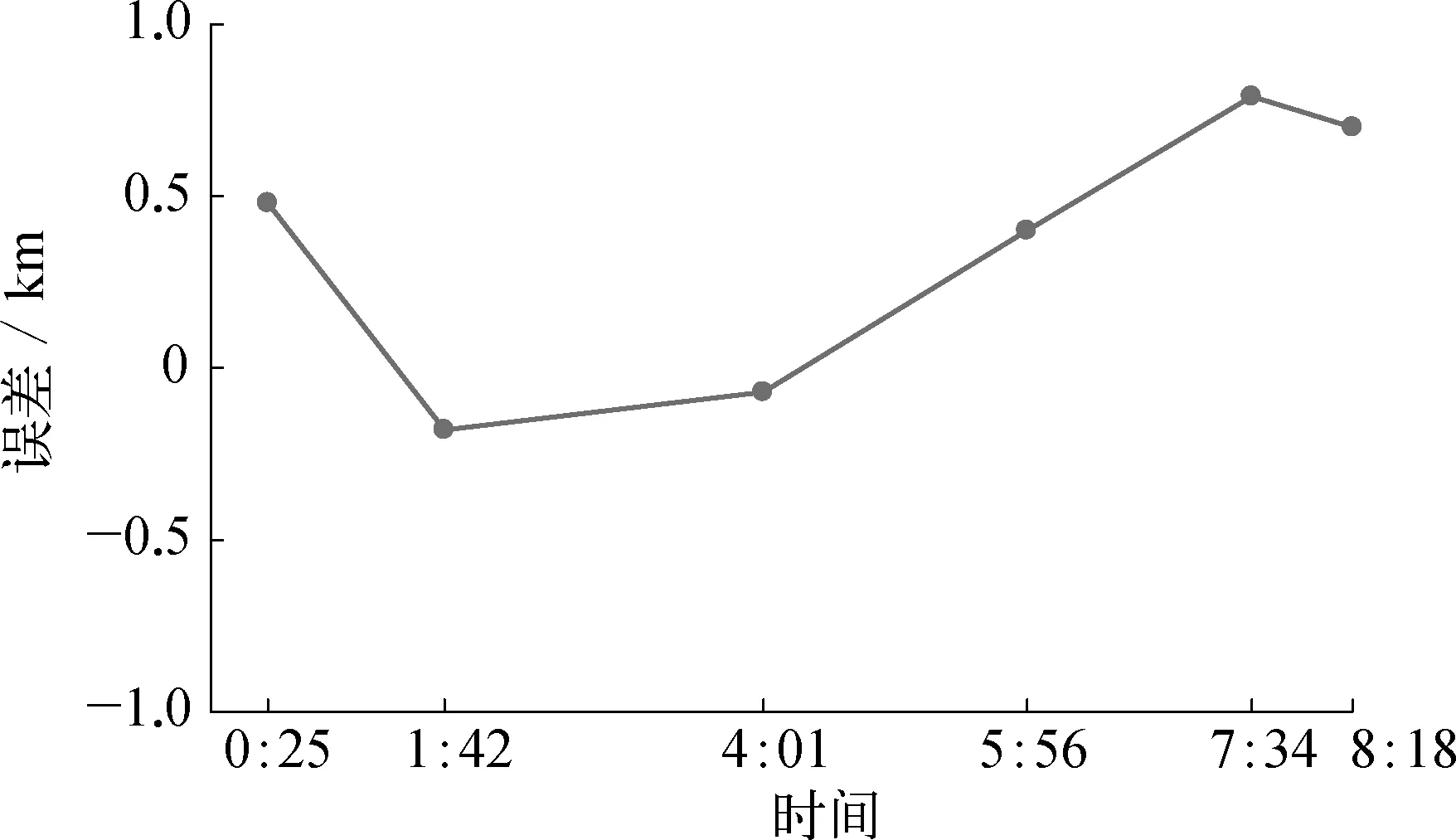
圖3 監測時間清管器定位誤差曲線
2.2 效果分析
圖4所示為2018年7月10日0時起光纖預警系統覆蓋部分區域的信號瀑布圖,其中橫坐標為監測位置距離收球點的距離,縱坐標為時間,黑點表示在對應的時刻和位置產生了1個振動信號,瀑布圖描述了光纖預警系統采集到的距B站15~30 km管道沿線的振動情況。結合現場情況分析圖4可知:
1)虛線處為清管器移動軌跡,清管器于2018年7月10日0時自30 km處勻速向收球點移動,于當日4時20分左右移動到15 km處,可以直觀地監測出清管器的移動軌跡。
2)清管器以約3.4 km/h的速度移動,全線監測效果良好。
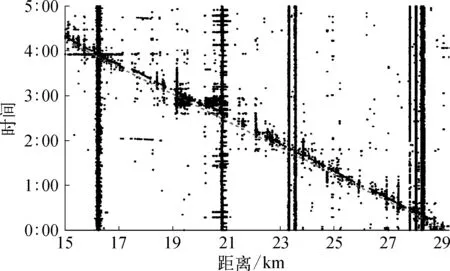
圖4 光纖預警系統覆蓋區域信號瀑布示意
綜上分析可知,由于光纖預警系統采用分布式光纖傳感器采集清管器工作時產生的振動信號,可以實時跟蹤清管器的位置,避免了常規固定點監測方法中存在的清管器監測盲區等情況;同時,該系統監測清管器的定位誤差較小,具有對清管器移動位置精確定位的能力。
3 結束語
本文介紹了光纖預警系統在清管器軌跡跟蹤定位中的實際應用,系統采用分布式光纖傳感器采集清管器工作時在管道內產生的振動信號,實現了清管器的定位、跟蹤與實時運動軌跡監測,具有實際應用價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
