隨機(jī)正交匹配追蹤算法的熱光鬼成像
2019-07-02 12:12:34亓?xí)月?/span>宋漢全
實(shí)驗(yàn)室研究與探索 2019年6期
高 祿, 亓?xí)月?肖 珂, 宋漢全
(中國(guó)地質(zhì)大學(xué)(北京) 數(shù)理學(xué)院, 北京 100083)
0 引 言
鬼成像(Ghost Imaging, GI),也被稱為關(guān)聯(lián)成像或者符合成像,具有傳統(tǒng)光學(xué)成像所不具備的多種優(yōu)點(diǎn),如非定域性、超分辨率、無(wú)透鏡成像以及抗干擾能力強(qiáng)等特點(diǎn)[1-2]。鬼成像系統(tǒng)中包括“閑置光”和“探測(cè)光”兩個(gè)光路,“探測(cè)光”照射物體后的總光強(qiáng)值由一個(gè)不具備空間分辨率的探測(cè)器收集,即進(jìn)行“桶測(cè)量”;“閑置光”光路中的光束自由傳遞至探測(cè)器,光強(qiáng)的空間分布信息被CCD(Charge-coupled Device)探測(cè)器記錄下來(lái)。兩個(gè)光路中的任何一路的觀測(cè)數(shù)據(jù)都無(wú)法獲得被測(cè)物體的信息,然而經(jīng)過(guò)光場(chǎng)強(qiáng)度關(guān)聯(lián)計(jì)算后卻可獲得被測(cè)物體的圖像,因此人們形象地稱之為“鬼”成像[3]。這種新型的量子關(guān)聯(lián)成像方式在遙感[4-5]、醫(yī)學(xué)[6]、顯微成像[7],以及彈載、星載成像探測(cè)[8]等各領(lǐng)域具有潛在的應(yīng)用價(jià)值。
1988年,Klyshko[9]首次從理論上提出利用糾纏光子對(duì)進(jìn)行關(guān)聯(lián)成像的方案。1995年,史硯華研究小組首次利用糾纏光子對(duì)實(shí)現(xiàn)了量子成像和量子干涉實(shí)驗(yàn)[10]。2002年,Boyd等[11]首次利用經(jīng)典光源實(shí)現(xiàn)了鬼成像,由此證明了非相干的經(jīng)典光源也能夠?qū)崿F(xiàn)鬼成像,這一研究降低了鬼成像光源獲取的難度,促進(jìn)了鬼成像的實(shí)際應(yīng)用發(fā)展。隨后,計(jì)算關(guān)聯(lián)成像、差分關(guān)聯(lián)成像的提出以及壓縮感知算法的應(yīng)用研究,極大地提高了關(guān)聯(lián)成像的信息獲取效率和圖像質(zhì)量[12-18]。
對(duì)于空間頻率非相干熱光源鬼成像方案,獲取待測(cè)物體圖像信息需要對(duì)大量的采集數(shù)據(jù)進(jìn)行統(tǒng)計(jì)平均,而高質(zhì)量的圖像必然要以龐大的數(shù)據(jù)量為代價(jià)。這樣的采集過(guò)程很大程度地制約了成像效率,是鬼成像探測(cè)系統(tǒng)在實(shí)際應(yīng)用中的一個(gè)最大弊端。本文通過(guò)理論研究與實(shí)驗(yàn)驗(yàn)證,在壓縮感知鬼成像原理基礎(chǔ)上[19-20],提出隨機(jī)正交匹配追蹤算法,利用極少量測(cè)量數(shù)據(jù)即可再現(xiàn)待測(cè)物體的主要信息,從而能夠更好地促進(jìn)熱光鬼成像系統(tǒng)在實(shí)際中的應(yīng)用。
1 實(shí)驗(yàn)設(shè)置
實(shí)驗(yàn)裝置如圖1所示。He-Ne激光器發(fā)出的波長(zhǎng)為632.8 nm激光束通過(guò)1個(gè)反射鏡M的反射后,穿過(guò)兩個(gè)偏振片P1和P2,之后光束照射到勻速旋轉(zhuǎn)的毛玻璃RG上,產(chǎn)生了空間頻率隨機(jī)分布的非相干贗熱光源。N為放置在毛玻璃RG之前的透鏡組,用來(lái)調(diào)節(jié)照射到毛玻璃上的激光橫截面尺寸的大小。實(shí)驗(yàn)中贗熱光發(fā)出的光束穿過(guò)光闌Iris后,被50/50非偏振分束器BS分成光強(qiáng)相同的兩束光。待測(cè)物體T緊貼探測(cè)器D1放置,光束經(jīng)待測(cè)物體T后被探測(cè)器收集,進(jìn)行“桶測(cè)量”,該光路稱為測(cè)試光路;另一光路中的光自由傳播到探測(cè)器處,探測(cè)器可獲得光場(chǎng)橫截面的光強(qiáng)分布,該光路為參考光路。實(shí)驗(yàn)中,可以通過(guò)調(diào)節(jié)光闌孔徑的大小來(lái)控制贗熱光源的橫截面尺寸,進(jìn)而調(diào)控關(guān)聯(lián)成像的分辨率和可見(jiàn)度。BS距兩個(gè)探測(cè)器和的距離均為30 cm,即探測(cè)光路和參考光路的光程相等。實(shí)驗(yàn)中所選擇的待成像的物體是透射型的振幅物體,物體大小為1 cm×1 cm,透光部分呈字母“C”的形狀,長(zhǎng)寬均為600 μm,透光部分線寬為150 μm,其余部分均不透光。

He-Ne-激光器;M-平面反射鏡;P1,P2-偏振片;N-擴(kuò)束器;RG-旋轉(zhuǎn)毛玻璃;Iris-光闌;BS-50/50非偏振分束器;D1,D2-CCD探測(cè)器;T-待測(cè)物體; C.C.-關(guān)聯(lián)測(cè)量
圖1 熱光源無(wú)透鏡鬼成像實(shí)驗(yàn)裝置圖
2 理論分析
2.1 熱光場(chǎng)二階關(guān)聯(lián)函數(shù)
熱光關(guān)聯(lián)成像的理論基礎(chǔ)是熱光場(chǎng)的二階關(guān)聯(lián)特性。被測(cè)物體的圖像是通過(guò)兩個(gè)探測(cè)器橫截面光場(chǎng)的二階關(guān)聯(lián)函數(shù)所獲取。根據(jù)高斯矩定理,當(dāng)光場(chǎng)函數(shù)滿足高斯統(tǒng)計(jì)分布時(shí),高階關(guān)聯(lián)函數(shù)可以用一階關(guān)聯(lián)表示。熱光場(chǎng)的二階關(guān)聯(lián)函數(shù)可以寫(xiě)作:
G(2)(r1,r2,t1,t2)=〈E*(r1,t1)E(r1,t1)〉·
〈E*(r2,t2)E(r2,t2)〉+〈E*(r1,t1)E(r2,t2)〉·
〈E*(r2,t2)E(r1,t1)〉=G(1)(r1,t1)G(1)(r2,t2)+
|G(1)(r1,t2)|2
(1)
式中:E(ri,ti) (i=1,2)表示探測(cè)器D1和D2處的光場(chǎng)函數(shù);第1項(xiàng)表示探測(cè)器D1和D2處強(qiáng)度分布的乘積,理想情況下是一個(gè)常數(shù),通常視為直流背景項(xiàng);第2項(xiàng)表示光場(chǎng)強(qiáng)度的關(guān)聯(lián),即光場(chǎng)的關(guān)聯(lián)信息。
歸一化二階關(guān)聯(lián)函數(shù)可以表示為:
g(2)(r1,r2,t1,t2)=
(2)
g(2)在完全非相干光的理想情況下數(shù)值為2,在一般的部分非相干光源情況下,其測(cè)量值介于1和2之間,數(shù)值越接近2表明關(guān)聯(lián)圖像的可見(jiàn)度越高。
2.2 壓縮感知算法
Candes等提出了壓縮感知理論,該理論不同于傳統(tǒng)的奈奎斯特采樣定理。它指出,如果待測(cè)信號(hào)是可壓縮的或者稀疏的,那么就能夠使用一個(gè)觀測(cè)矩陣將其投影到低維空間上,然后通過(guò)求解最優(yōu)化問(wèn)題,從投影中重構(gòu)出信號(hào)。壓縮感知算法打破了奈奎斯特采樣定理的采樣速率限制,將信號(hào)的采樣與壓縮編碼同時(shí)進(jìn)行。壓縮感知包括稀疏表示、線性觀測(cè)以及算法重構(gòu)3個(gè)環(huán)節(jié)。
根據(jù)關(guān)聯(lián)成像的基本原理,桶測(cè)量的每個(gè)觀測(cè)值都與物體的透射函數(shù)T(x,y)有關(guān)。如果將桶測(cè)量第r次獲得的探測(cè)值記為Br,Ir(x,y),則表示參考光路的光強(qiáng)分布可以通過(guò)下式計(jì)算出具體值:
(3)
對(duì)物體進(jìn)行M次采樣后,可以得到M組Br和Ir(x,y)。為了恢復(fù)物體的透射函數(shù),將桶測(cè)量值與參考光路的強(qiáng)度測(cè)量矩陣進(jìn)行關(guān)聯(lián),即:
(4)

根據(jù)式(3),將桶測(cè)量值Br作為觀測(cè)值,將光強(qiáng)矩陣Ir(x,y)作為觀測(cè)矩陣,則可以將信號(hào)重構(gòu)問(wèn)題歸結(jié)為優(yōu)化問(wèn)題:
(5)
在壓縮感知算法中,不同的重構(gòu)算法得出的結(jié)果有很大的差異,本文主要對(duì)正交匹配追蹤(Orthogonal Matching Pursuit,OMP)算法進(jìn)行討論。正交匹配追蹤的核心思想是,每次循環(huán)通過(guò)計(jì)算殘差與觀測(cè)矩陣每1列的內(nèi)積,找出內(nèi)積最大也就是兩者最相似的1列,然后根據(jù)最小二乘法就能夠最大程度地求解出殘差最小的原始信號(hào)估值。在運(yùn)用OMP算法重構(gòu)關(guān)聯(lián)影像時(shí),雖然能夠?qū)⒂跋竦闹饕畔⑻崛〕鰜?lái),但是重構(gòu)圖像并不具有良好的連續(xù)性,信息缺失比較嚴(yán)重。尤其是在測(cè)量幀數(shù)比較多的情況下,算法恢復(fù)的圖像并不會(huì)表現(xiàn)出較好的可見(jiàn)度和分辨率。這是由于在使用正交匹配追蹤算法時(shí),并沒(méi)有充分運(yùn)用所采集的待測(cè)物體的數(shù)據(jù)信息,隨著測(cè)量幀數(shù)的增多,此缺點(diǎn)愈加明顯。

3 實(shí)驗(yàn)結(jié)果
3.1 熱光鬼成像實(shí)驗(yàn)
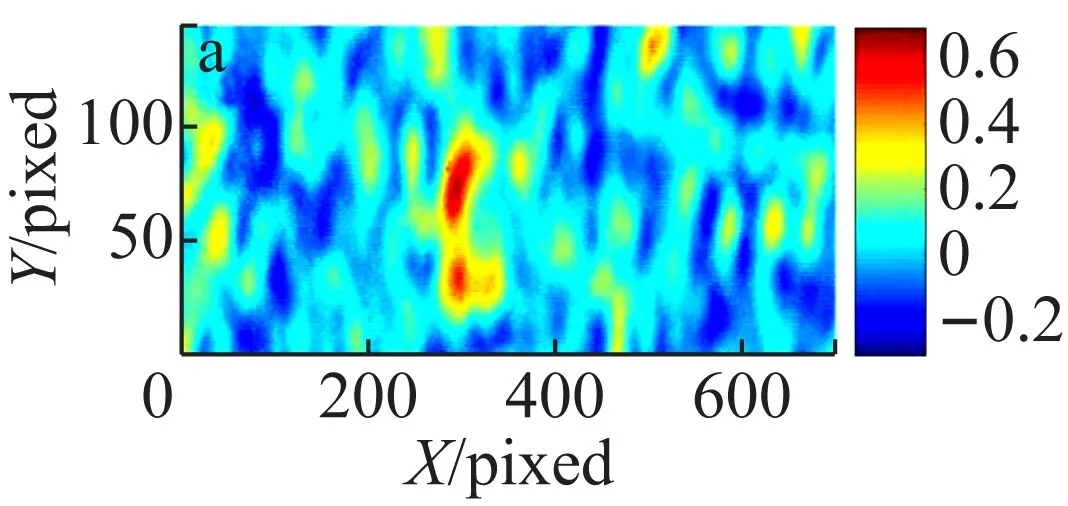
首先進(jìn)行了熱光鬼成像實(shí)驗(yàn),所采用的實(shí)驗(yàn)方案為無(wú)透鏡成像。實(shí)驗(yàn)中采集了不同的統(tǒng)計(jì)平均幀數(shù),分別計(jì)算二階關(guān)聯(lián)函數(shù)值,實(shí)驗(yàn)結(jié)果如圖2所示。圖2的結(jié)果顯示對(duì)于相同的實(shí)驗(yàn)裝置和待成像物體,在實(shí)驗(yàn)參數(shù)完全相同的情況下,采集的隨機(jī)幀數(shù)越多,圖像的可見(jiàn)度越高。當(dāng)統(tǒng)計(jì)幀數(shù)低于1 000幀時(shí),圖像質(zhì)量隨著幀數(shù)的增加明顯提高。當(dāng)統(tǒng)計(jì)平均幀數(shù)從1 000幀逐步增加到5 000幀時(shí),圖像質(zhì)量趨于穩(wěn)定,即當(dāng)統(tǒng)計(jì)幀數(shù)達(dá)到一定數(shù)量時(shí),圖像質(zhì)量保持不變。由此可見(jiàn),若想進(jìn)一步提高圖像的質(zhì)量,需要采用其他的方法。
(a) 100幀
(b) 300幀
(c) 500幀

(d) 1 000幀

(e) 3 000幀
(f) 5 000幀
圖2 不同統(tǒng)計(jì)幀數(shù)熱光關(guān)聯(lián)無(wú)透鏡鬼成像結(jié)果
3.2 壓縮感知算法鬼成像實(shí)驗(yàn)
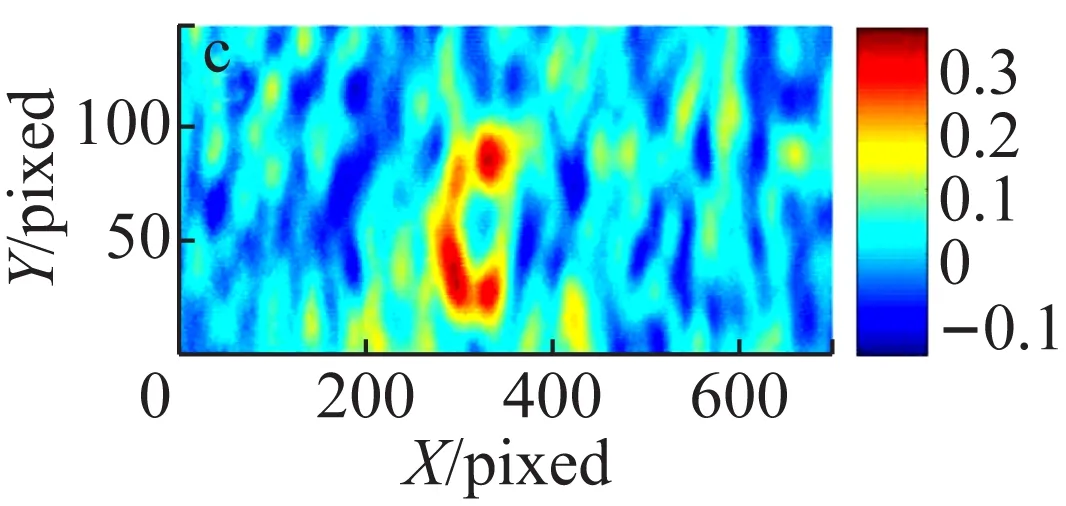
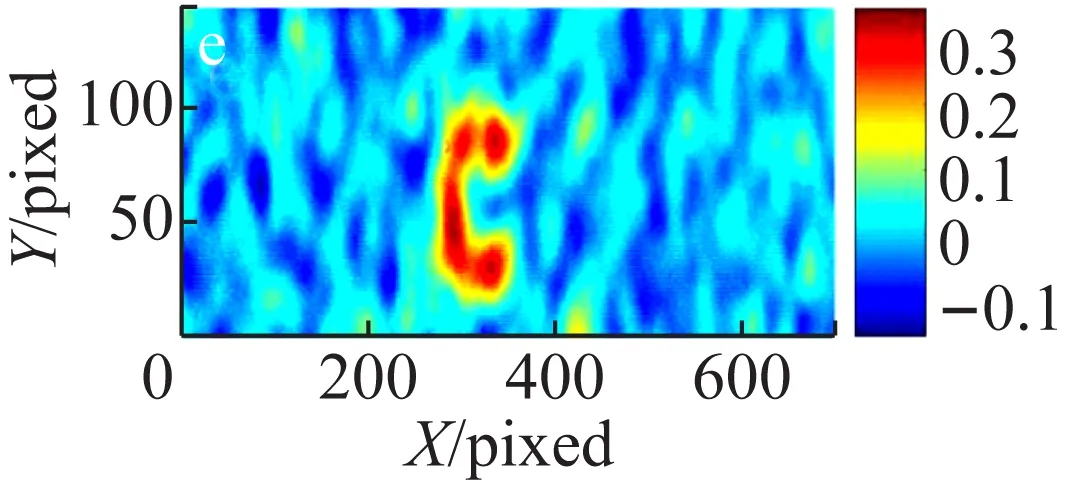
首先利用OMP算法針對(duì)300幀、1 000幀以及5 000幀的數(shù)據(jù)進(jìn)行相對(duì)應(yīng)的數(shù)據(jù)處理,將物體的主要信息從光強(qiáng)測(cè)量中提取出來(lái),得到如圖3所示的結(jié)果圖。圖3的結(jié)果顯示,即使用少量的采集數(shù)據(jù)(如300幀),也能夠獲得比較清晰的待測(cè)物體“C”的圖像,1 000幀和5 000幀的OMP恢復(fù)圖像結(jié)果相對(duì)于300幀的圖像恢復(fù)結(jié)果而言,圖像的連續(xù)性和清晰度有所改善,但是改善效果并不明顯。
圖3中的恢復(fù)圖像與原始關(guān)聯(lián)影像相比較而言,只有“信號(hào)”部分有數(shù)值,而其余部分都為零,因而可以認(rèn)為圖像的信噪比為無(wú)窮大。然而圖像信噪比大幅提高的同時(shí),由于數(shù)據(jù)缺失比較嚴(yán)重,只能利用算法恢復(fù)識(shí)別出物體的外形輪廓。由此可見(jiàn),OMP算法能夠在測(cè)量幀數(shù)較少的情況下實(shí)現(xiàn)對(duì)待測(cè)物體的外形輪廓識(shí)別,在遠(yuǎn)程非定域物體識(shí)別方面極具應(yīng)用價(jià)值。
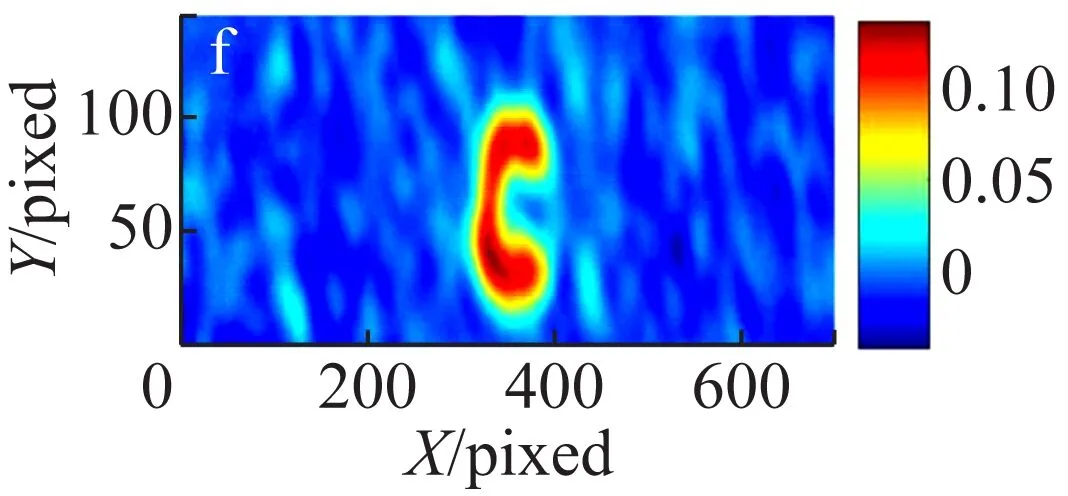
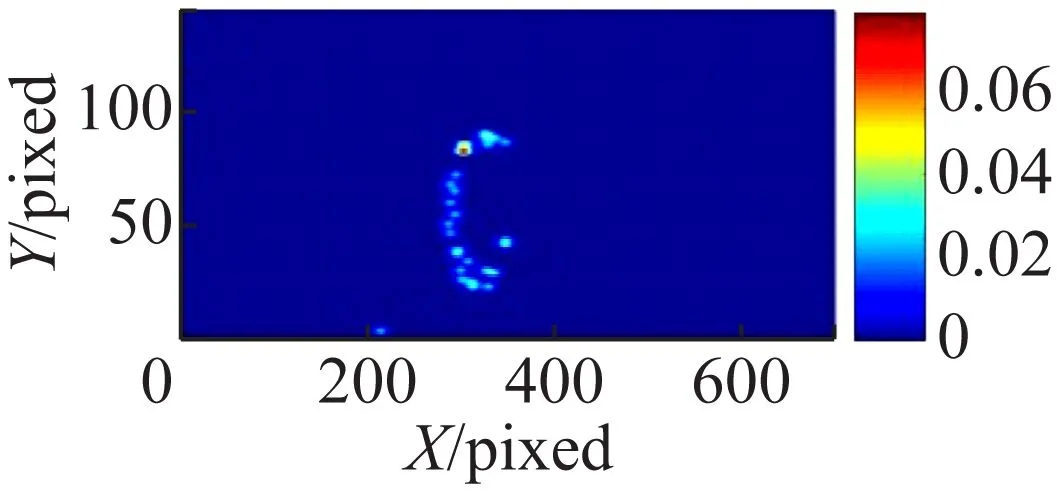
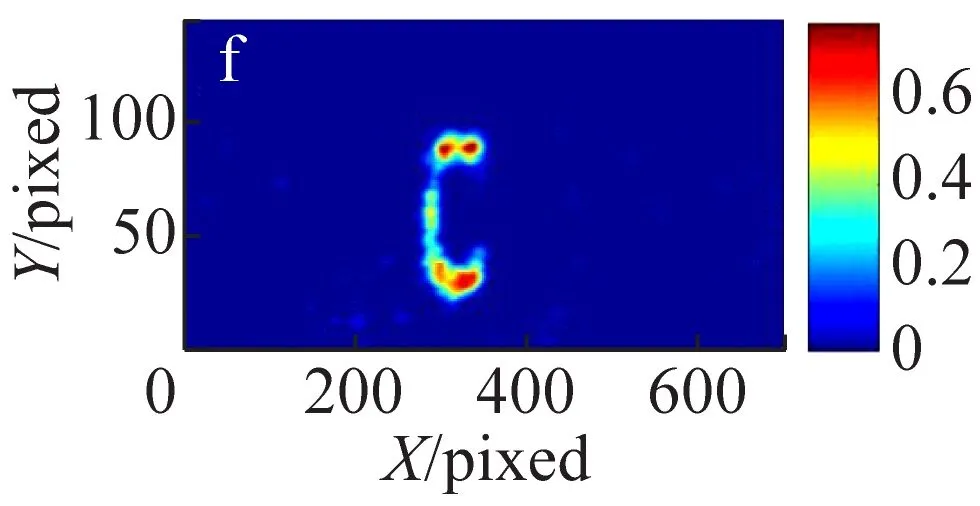
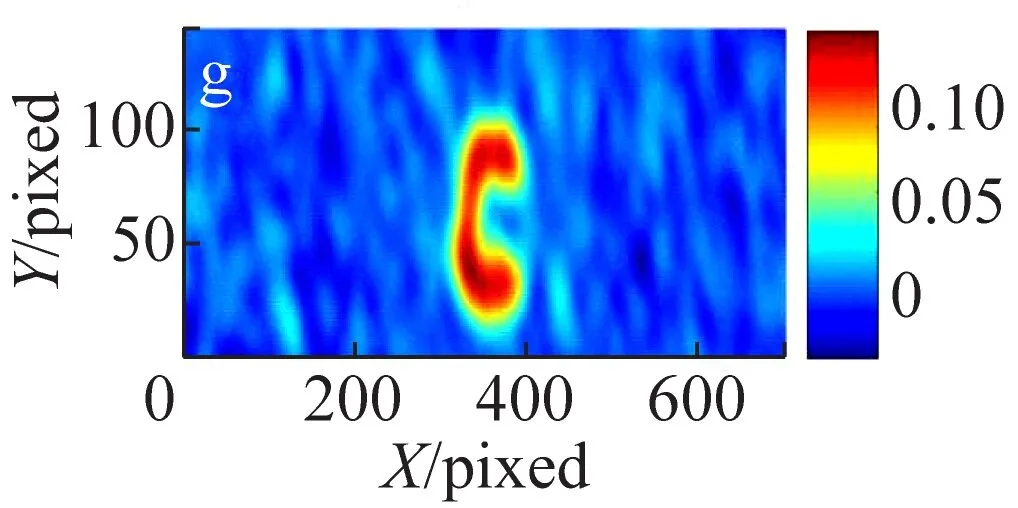
為了進(jìn)一步提高熱光關(guān)聯(lián)成像壓縮感知算法恢復(fù)圖像的質(zhì)量,在OMP算法的基礎(chǔ)上提出RandOMP算法。對(duì)500幀、1 000幀以及5 000幀的原始數(shù)據(jù)進(jìn)行處理,算法的處理過(guò)程為:從觀測(cè)數(shù)據(jù)中隨機(jī)選取了500幀數(shù)據(jù)進(jìn)行一次OMP處理,共選取了500次得到500個(gè)OMP重構(gòu)結(jié)果,然后對(duì)這500組結(jié)果求平均,最終得到優(yōu)化解。將RandOMP處理的結(jié)果與原始熱光關(guān)聯(lián)以及使用OMP算法處理的圖像進(jìn)行了對(duì)比分析,所得結(jié)果如圖4所示。

(a)
(b)

(c)

(d)

(e)

(f)
圖3 OMP算法處理的熱光關(guān)聯(lián)成像結(jié)果
(a),(b),(c)分別表示300幀、1 000幀以及5 000幀的原始關(guān)聯(lián)圖像;(d),(e),(f)分別表示300幀、1 000幀以及5 000幀的經(jīng)過(guò)OMP算法處理的結(jié)果

(a)

(b)

(c)

(d)

(e)
(f)
(g)

(h)

(i)
圖4 熱光關(guān)聯(lián)圖像、OMP處理圖像及RandOMP處理圖像結(jié)果
(a), (b)和(c): 500幀關(guān)聯(lián)圖像、OMP和RandOMP處理結(jié)果;(d),(e)和(f):1 000幀關(guān)聯(lián)圖像、OMP及RandOMP處理結(jié)果;(g),(h)和(i):5 000幀關(guān)聯(lián)圖像、OMP及RandOMP處理結(jié)果。
將圖3和圖4的重構(gòu)圖像進(jìn)行對(duì)比分析可以得知,RandOMP重構(gòu)算法相比于傳統(tǒng)的OMP重構(gòu)算法而言,主要具有以下兩方面的優(yōu)勢(shì):
(1) RandOMP重構(gòu)算法的運(yùn)行時(shí)間更短。由于每次循環(huán)都是使用抽稀后的矩陣執(zhí)行OMP重構(gòu)過(guò)程,相比于直接使用原始矩陣進(jìn)行OMP重構(gòu),運(yùn)行速度明顯提高。這種運(yùn)行速度提高的優(yōu)勢(shì)會(huì)隨著采集幀數(shù)的增加,測(cè)量矩陣的增大,而越發(fā)明顯。
(2)RandOMP重構(gòu)算法對(duì)圖像信息的挖掘更充分,重構(gòu)圖像的質(zhì)量更高。由圖4給出的3列對(duì)比圖像結(jié)果可以看出相同采集幀數(shù)的情況下,RandOMP的恢復(fù)圖像連續(xù)性更好,更有利于對(duì)待測(cè)物體細(xì)節(jié)的分辨,這是因?yàn)镽andOMP算法與OMP算法相比損失的圖像信息更少。
4 結(jié) 語(yǔ)
將壓縮感知的OMP算法應(yīng)用于熱光無(wú)透鏡關(guān)聯(lián)成像的實(shí)驗(yàn)方案中。實(shí)驗(yàn)結(jié)果表明,僅需要300幀的少量采集數(shù)據(jù)即可很好地將振幅型待測(cè)物體的信息提取,恢復(fù)出物體的外形輪廓。OMP算法為熱光關(guān)聯(lián)成像系統(tǒng)利用少量數(shù)據(jù)進(jìn)行物體識(shí)別提供了可靠的科學(xué)依據(jù)。進(jìn)一步,在OMP算法基礎(chǔ)上提出改進(jìn)的RandOMP算法,并且應(yīng)用于熱光關(guān)聯(lián)成像實(shí)驗(yàn)中。實(shí)驗(yàn)結(jié)果表明,RandOMP算法可以明顯地提高獲取再現(xiàn)圖像的質(zhì)量,相比于OMP算法可以大幅提高重構(gòu)圖像的連續(xù)性,可以應(yīng)用于熱光關(guān)聯(lián)成像系統(tǒng)在復(fù)雜物理環(huán)境下的探測(cè)。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55

- 實(shí)驗(yàn)室研究與探索的其它文章
- 我每天的工作就是做實(shí)驗(yàn)(二)
——記電子科技大學(xué)“90后”女科學(xué)家、副院長(zhǎng)劉明偵 - 應(yīng)用綠色化學(xué)原理構(gòu)建化學(xué)實(shí)驗(yàn)室安全體系的思路和方法
- 大型儀器設(shè)備共享平臺(tái)的建設(shè)與管理
- 高校實(shí)驗(yàn)技術(shù)隊(duì)伍定編定崗方法與優(yōu)化
- 高鐵變電所多層次實(shí)訓(xùn)系統(tǒng)的研究與應(yīng)用
- 校企深度合作建設(shè)面向卓越工程師專業(yè)的工程設(shè)計(jì)實(shí)踐課程