智能交通最優(yōu)路徑的分析與規(guī)劃
2019-07-01 06:39:16單春萍侯少友左志強(qiáng)
神州·上旬刊 2019年6期
關(guān)鍵詞:大數(shù)據(jù)人工智能
單春萍 侯少友 左志強(qiáng)
摘要:隨著人工智能的快速發(fā)展,所以在智能交通方面也取得了很多突破性的進(jìn)展。本研究即是在國(guó)內(nèi)外智能交通的基礎(chǔ)上,提出的一種新的智能交通最優(yōu)路徑的分析規(guī)劃模型。該模型是建立在大數(shù)據(jù)基礎(chǔ)上,通過(guò)車載GPS定位系統(tǒng)和車主手機(jī)使用的導(dǎo)航軟件來(lái)定位車主目前所處的地理位置,并利用衛(wèi)星和航空攝影以及流動(dòng)車觀測(cè)等技術(shù)來(lái)進(jìn)行實(shí)時(shí)數(shù)據(jù)收集,將收集的數(shù)據(jù)傳輸至我們的分析系統(tǒng),最后通過(guò)云端數(shù)據(jù)庫(kù)和人工智能技術(shù)進(jìn)行相關(guān)道路實(shí)時(shí)路況分析和全局規(guī)劃與決策,用以幫助駕駛?cè)诉x擇最佳路線到達(dá)目的地,節(jié)約時(shí)間和經(jīng)濟(jì)成本,提高駕駛體驗(yàn)。
關(guān)鍵詞:大數(shù)據(jù);人工智能;云端數(shù)據(jù)庫(kù);最優(yōu)路徑選擇
引言
經(jīng)濟(jì)的發(fā)展和科技的進(jìn)步,使得機(jī)動(dòng)車輛成為公眾出行最主要的交通工具之一,但是城市內(nèi)的道路設(shè)施卻因?yàn)榭臻g資源的有限而無(wú)法滿足機(jī)動(dòng)車的高速增長(zhǎng),使得交通擁堵成為一個(gè)世界性的普遍現(xiàn)象和社會(huì)問(wèn)題,雖然國(guó)家通過(guò)修建更多道路來(lái)減輕交通壓力實(shí)現(xiàn)難度還是很高,而智能交通系統(tǒng)利用信息與通信、傳感技術(shù)、計(jì)算機(jī)技術(shù)對(duì)衛(wèi)星定位系統(tǒng)打點(diǎn)軌跡實(shí)時(shí)分析處理,提供實(shí)時(shí)路況信息供出行者指定最優(yōu)的合適路線,極大提高道路利用率,減少交通擁堵現(xiàn)狀,是解決交通擁堵問(wèn)題的最有效方式[1]。
目前人工智能正處于發(fā)展中狀態(tài),小到手機(jī)的操作系統(tǒng),大到人造衛(wèi)星的正常運(yùn)行,都與人工智能息息相關(guān)。人工智能從誕生以來(lái),理論和技術(shù)的日益成熟,應(yīng)用領(lǐng)域也隨之不斷擴(kuò)大,不難設(shè)想,如果這項(xiàng)科學(xué)技術(shù)能夠以穩(wěn)定、健康的方式發(fā)展下去,未來(lái)它將帶給人類無(wú)窮的財(cái)富將會(huì)成為人類智慧的“容器”。本研究最大的特色即是探索人工智能在最優(yōu)道路規(guī)劃方面的應(yīng)用,具有較強(qiáng)的實(shí)踐意義。
一、大數(shù)據(jù)應(yīng)用分析
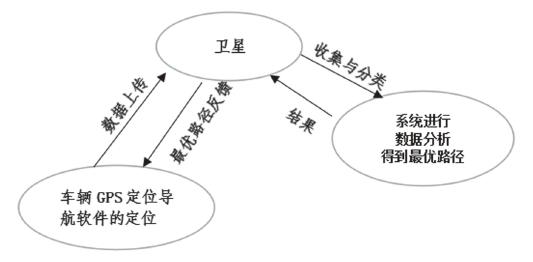
通過(guò)車輛里安裝的GPS定位系統(tǒng)或者車主手機(jī)使用的導(dǎo)航軟件來(lái)定位車主目前所處的地理位置,利用衛(wèi)星來(lái)進(jìn)行實(shí)時(shí)數(shù)據(jù)收集,將收集的數(shù)據(jù)傳輸至我們的分析系統(tǒng),經(jīng)過(guò)云端數(shù)據(jù)分析處理后,將最佳行駛路線以及地形通過(guò)點(diǎn)、線,面的方式進(jìn)行表達(dá),最終以矢量模型的形式發(fā)送到用戶手上。
由于道路狀況變化過(guò)快,故我們必須時(shí)刻更新后臺(tái)數(shù)據(jù)庫(kù)的數(shù)據(jù)信息,一般的數(shù)據(jù)庫(kù)已經(jīng)遠(yuǎn)遠(yuǎn)不能滿足需求,所以利用云端的數(shù)據(jù)庫(kù)進(jìn)行數(shù)據(jù)的實(shí)時(shí)更新與數(shù)據(jù)分析。
大數(shù)據(jù)對(duì)云端數(shù)據(jù)庫(kù)的作用包括兩個(gè)層面:
①提升數(shù)據(jù)覆蓋范圍和數(shù)據(jù)實(shí)時(shí)性;
②使基礎(chǔ)數(shù)據(jù)和動(dòng)態(tài)數(shù)據(jù)在廣度、深度上得到強(qiáng)化。
(1)交通量的調(diào)查方法
①儀器自動(dòng)計(jì)測(cè)法與GPS法:以司機(jī)、乘客手機(jī)上的地圖軟件和車輛上安裝的GPS來(lái)采集實(shí)時(shí)車速為主,以攝像頭,道路雷達(dá)測(cè)速測(cè)量車速為輔,判別道路是否擁擠。
②航空攝影法:利用航空攝影技術(shù)來(lái)進(jìn)行交通量檢查,其觀測(cè)點(diǎn)是一個(gè)空間連續(xù)的移動(dòng)斷面,因此航空攝影法車流量Q航的計(jì)算為:
Q航=KVS
Q=Q1+Q2
式中:Q----順向、逆向雙向交通流量;
Q1、Q2----順向、逆向車流量;
VS----車流空間平均車速/(km/h)
③流動(dòng)車觀測(cè)法及人工觀測(cè)法:通過(guò)用戶的照片拍攝以及用戶在地圖軟件的道路狀況反饋、實(shí)地外采以及人工建模處理等來(lái)了解道路狀況[2]。
(2)數(shù)據(jù)庫(kù)部分代碼:
DROP TABLE IF EXISTS `city`;
CREATE TABLE `city`(
`id` int(9)NOT NULL AUTO_INCREMENT,
`city_name` varchar(255)DEFAULT NULL COMMENT'城市名',
`city_code` int(6)NOT NULL COMMENT'城市郵編',
`leave` varchar(1)NOT NULL COMMENT'城市等級(jí):0:省份;1:城市',
`creat_time` datetime NOT NULL COMMENT'創(chuàng)建時(shí)間',
`modify_time` datetime DEFAULT NULL COMMENT'修改時(shí)間',
PRIMARY KEY(`id`)
)ENGINE=InnoDB AUTO_INCREMENT=3 DEFAULT CHARSET=utf8;
INSERT INTO `city` VALUES('1','合肥','230000','1','2018-11-03 09:08:49','2018-12-25 17:03:10');
INSERT INTO `city` VALUES('2','阜陽(yáng)','236000','1','2018-11-03 11:10:04','2018-12-25 18:10:17');
(3)車輛多路線規(guī)劃代碼:
int stratFlag = 0;
try{
stratFlag = mAMapNavi.stratConvert(hightspeed,congestion,cost,avoidhightspeed,true);
}catch(Exception e){
LOGGER.debug("多線路規(guī)劃失敗:"+ e.printStackTrace());
}
public void multiLineSelectionSuccess(int[]routes){
routeOverlays.clear();
HashMap<Integer,AMapNaviPath>paths = mAMapNavi.getNaviPaths();
for(int i = 0;i < routes.length;i++){
AMapNaviPath path = paths.get(routes[i]);
if(path!= null){
drawRoutes(routes[i],path);
}
}
}
aMapNavi.selectRouteId(routeIds[routeIndex]);
二、Artificial Intelligence
(1)交通特性:
在整個(gè)交通系統(tǒng)中,司機(jī)的信息處理過(guò)程總體概括就是感知、判斷決策和操縱三個(gè)階段不斷循環(huán)往復(fù)的過(guò)程[3]。本系統(tǒng)是通過(guò)智能感知的方法為司機(jī)提供較好的決策意見(jiàn)。
以往的感知是司機(jī)通過(guò)視覺(jué)、聽(tīng)覺(jué)等感覺(jué)器官來(lái)感知行車的環(huán)境、條件和信息,如道路線形、交通標(biāo)志、人與車等。智能的感知?jiǎng)t是通過(guò)大數(shù)據(jù)平臺(tái),掌握車輛從起點(diǎn)到終點(diǎn)的數(shù)目、車速、車距、路狀、交通標(biāo)志、紅綠燈個(gè)數(shù)及停留時(shí)間等一系列與駕駛有關(guān)的特性數(shù)據(jù)。通過(guò)對(duì)比可以發(fā)現(xiàn)以前的感知只是司機(jī)的局部感知,而智能感知從全局的數(shù)據(jù)出發(fā),完成了全程的駕駛感知,所以全局規(guī)劃決策優(yōu)于局部觀察決策[4]。
(2)決策模型:
以前的判斷決策形式是通過(guò)司機(jī)在感知信息的基礎(chǔ)上,結(jié)合駕駛經(jīng)驗(yàn)和技能,做出判斷,來(lái)確定有利于汽車安全順暢的行駛措施,這涉及很多個(gè)人技能與經(jīng)驗(yàn),很容易造成各種突發(fā)情況[5]。而本系統(tǒng)提出的新的智能決策模型將很好的避免這類問(wèn)題,更好的完成決策。
預(yù)測(cè):
根據(jù)交通系統(tǒng)中是否接入人工智能道路分析系統(tǒng)的車輛及其它因素,現(xiàn)將預(yù)測(cè)分為三種情況。
①?zèng)]有接入人工智能道路分析系統(tǒng)和導(dǎo)航系統(tǒng)的預(yù)測(cè)方式。對(duì)于電瓶車、摩托車、拖拉機(jī)、輪式專用車械、自行車等車可以根據(jù)以前統(tǒng)計(jì)的數(shù)據(jù)直接進(jìn)行擬合,因?yàn)閿?shù)量較少,行駛情況變化不大,對(duì)主道路不會(huì)產(chǎn)生較大的影響。
②沒(méi)有接入人工智能道路分析系統(tǒng)和接入導(dǎo)航系統(tǒng)的預(yù)測(cè)方式。接入導(dǎo)航系統(tǒng)的車輛,可以通過(guò)導(dǎo)航系統(tǒng)的定位數(shù)據(jù)和其他數(shù)據(jù),利用人工智能算法模型來(lái)預(yù)測(cè)這些車輛的走向趨勢(shì)。
③接入人工智能通路分析系統(tǒng)和導(dǎo)航系統(tǒng)的預(yù)測(cè)方式。通過(guò)關(guān)于決策駕駛的數(shù)據(jù)直接預(yù)測(cè)適合車輛的最優(yōu)的行駛路徑,將得到非常失敗的效果。因?yàn)檫@是一個(gè)開(kāi)系統(tǒng),假設(shè)有很多車都被規(guī)劃行駛那條原本不擁堵的道路,下一刻將會(huì)變的非常擁堵,所以必須要形成閉系統(tǒng)來(lái)進(jìn)行預(yù)測(cè)規(guī)劃。
本系統(tǒng)的解決方法如下:智能系統(tǒng)多級(jí)化分析。首先通過(guò)影響駕駛路線的數(shù)據(jù)來(lái)預(yù)測(cè)車輛走向并初步規(guī)劃路徑,然后將車輛的規(guī)劃路徑數(shù)據(jù)傳遞給下一層再做出新的規(guī)劃來(lái)校正原來(lái)路徑數(shù)據(jù),再繼續(xù)向下傳遞。接著校正,最終形成從個(gè)人車輛到一條路再到一個(gè)社區(qū)一直到整個(gè)城市的閉合的人工智能道路分析系統(tǒng)。
規(guī)劃:
通過(guò)上述三種情況的預(yù)測(cè),再經(jīng)過(guò)數(shù)據(jù)整合分析,用接入人工智能通路分析系統(tǒng)和導(dǎo)航系統(tǒng)的預(yù)測(cè)方式來(lái)完成整個(gè)城市的車輛路徑規(guī)劃問(wèn)題[6]。
(3)訓(xùn)練模型:
通過(guò)來(lái)源于交通平臺(tái)的各種數(shù)據(jù)(上述中預(yù)測(cè)規(guī)劃的數(shù)據(jù)、優(yōu)秀駕駛員的經(jīng)驗(yàn)數(shù)據(jù)等其他的交通數(shù)據(jù))來(lái)訓(xùn)練我們的人工智能道路分析系統(tǒng)的模型,完善模型,給出最佳的決策意見(jiàn),來(lái)解決道路擁堵問(wèn)題。
三、小結(jié)
本研究以智能交通網(wǎng)絡(luò)為基礎(chǔ),對(duì)車輛行駛的最優(yōu)路徑規(guī)劃方案進(jìn)行研究。所做具體工作如下:
(1)利用大數(shù)據(jù)和人工智能對(duì)樣本數(shù)據(jù)進(jìn)行計(jì)算,推算出當(dāng)前道路的平均通行速度和路面突發(fā)事件進(jìn)而確定智能交通路網(wǎng)模型對(duì)車輛最優(yōu)行駛路線;
(2)通過(guò)物聯(lián)網(wǎng)技術(shù)將所有車輛的方位進(jìn)行實(shí)時(shí)統(tǒng)計(jì),并通過(guò)一定時(shí)間內(nèi)的數(shù)據(jù)使用人工智能自主分析得出每個(gè)車輛的行駛趨勢(shì),預(yù)測(cè)以后某個(gè)時(shí)間段內(nèi)的道路情況,最終給出最佳行駛路線;
(3)從三個(gè)方面對(duì)比提出人工智能通路分析系統(tǒng)的必要性。
參考文獻(xiàn):
[1]王賽政.動(dòng)態(tài)交通條件下車輛導(dǎo)航系統(tǒng)的最優(yōu)路徑規(guī)劃方法研究[D].長(zhǎng)沙理工大學(xué),2010.
[2]梁卜文.大數(shù)據(jù)時(shí)代下的智能交通[J].科技風(fēng),2018 (03):213.
[3]陸楊潔.智能交通系統(tǒng)中車輛最優(yōu)行駛路線規(guī)劃設(shè)計(jì)[D].浙江工業(yè)大學(xué),2015.
[4]高子初,張寧.用大數(shù)據(jù)智能交通技術(shù)管理復(fù)雜多車道道路的新策略[J].科技與創(chuàng)新,2018 (01):25-26.
[5]胡輝,胡松,蔡映雪,陳伽,尹輝,蔡昭權(quán).基于北斗衛(wèi)星定位的智能交通車輛管理系統(tǒng)[J].現(xiàn)代計(jì)算機(jī)(專業(yè)版),2017 (25):48-51.
[6]李娟.智能交通管控平臺(tái)重點(diǎn)車輛管理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].山東大學(xué),2016.
猜你喜歡
西安航空學(xué)院學(xué)報(bào)(2022年2期)2022-07-04 07:45:42
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
新聞世界(2016年10期)2016-10-11 20:13:53
科技視界(2016年20期)2016-09-29 10:53:22
南風(fēng)窗(2016年19期)2016-09-21 16:51:29
南風(fēng)窗(2016年19期)2016-09-21 04:56:22
中國(guó)記者(2016年6期)2016-08-26 12:36:20