面向機(jī)器人抓取過(guò)程中目標(biāo)位姿估計(jì)方法*
2019-06-25 03:48:08李樹(shù)春劉滿祿楊厚易劉理想
傳感器與微系統(tǒng) 2019年7期
關(guān)鍵詞:特征實(shí)驗(yàn)
李樹(shù)春, 張 靜,2, 張 華, 劉滿祿,2, 楊厚易, 劉理想
(1.西南科技大學(xué) 信息工程學(xué)院,四川 綿陽(yáng) 621000;2.中國(guó)科學(xué)技術(shù)大學(xué) 信息科學(xué)技術(shù)學(xué)院,安徽 合肥 230026)
0 引 言
視覺(jué)引導(dǎo)機(jī)械臂進(jìn)行抓取任務(wù)是目前機(jī)械臂抓取的主要方式。抓取過(guò)程分為目標(biāo)識(shí)別、目標(biāo)位姿估計(jì)和機(jī)械臂抓取。其中,目標(biāo)位姿估計(jì)精度決定了抓取的效果。Lin C等人[1]采用雙目視覺(jué),通過(guò)雙目立體視覺(jué)算法,對(duì)目標(biāo)進(jìn)行位姿估計(jì),并采用快速特征點(diǎn)提取和描述(oriented FAST and rotated BRIEF,ORB)算法動(dòng)態(tài)查找遮擋。隨著Xtion[2],Kinect等廉價(jià)傳感器的出現(xiàn),大量研究者開(kāi)始采用深度信息進(jìn)行目標(biāo)位姿估計(jì)。呂強(qiáng)等人[3]將RGB圖像和深度圖像結(jié)合,利用RGB圖像提取(normal aligned radial feature,NARF)和尺度不變特征變換(scale-invariant feature transform,SIFT)特征點(diǎn),采用隨機(jī)采樣一致性(random sample consensus,RANSAC)算法進(jìn)行位姿估計(jì)。楊邱滟等人[4]利用Kinect相機(jī)對(duì)仿人機(jī)器人抓取進(jìn)行目標(biāo)定位。Besl P J等人[5]利用迭代最近點(diǎn)(iterative closest point,ICP)算法對(duì)剛性物體進(jìn)行位姿估計(jì),但是該方法在有遮擋的情況下會(huì)存在局部最小解問(wèn)題。Lu J等人[6]提出了一種基于正態(tài)分布變換(normal distribution transform,NDT)算法的變尺度體素位姿估計(jì)法。
針對(duì)非結(jié)構(gòu)化環(huán)境,本文使用深度相機(jī)Kinect獲取點(diǎn)云圖像,提取快速點(diǎn)特征直方圖(fast point feature histograms,FPFH)描述子,結(jié)合奇異值分解算法和隨機(jī)采樣一致算法來(lái)對(duì)位姿進(jìn)行估計(jì)。
1 機(jī)器人抓取系統(tǒng)
系統(tǒng)硬件平臺(tái)如圖1,由Microsoft Kinect深度相機(jī),6自由度的輕量級(jí)機(jī)器人KINOVA MICO2和上位機(jī)組成。

圖1 系統(tǒng)硬件平臺(tái)
系統(tǒng)工作流程如圖2,離線制作模板。

圖2 系統(tǒng)工作流程
2 目標(biāo)位姿估計(jì)
在對(duì)目標(biāo)進(jìn)行位姿估計(jì)前,先對(duì)場(chǎng)景進(jìn)行體素濾波減少運(yùn)算量,然后采用分割算法將目標(biāo)與場(chǎng)景分割。
2.1 FPFH特征點(diǎn)提取
PFH描述符[7]通過(guò)考慮基于k領(lǐng)域中的點(diǎn)與其估計(jì)的表面法線之間的關(guān)系,來(lái)盡可能多地捕獲點(diǎn)云的表面變化,適應(yīng)鄰域中存在不同采樣密度或噪聲水平[8]。
點(diǎn)云空間中的一對(duì)點(diǎn)pt和ps,如圖3。

圖3 點(diǎn)云空間中的一對(duì)點(diǎn)
FPFH描述子是在PFH基礎(chǔ)上提出的,相對(duì)PFH描述子,F(xiàn)PFH的總體復(fù)雜度大大降低,且能保存PFH的大多數(shù)信息。FPFH描述子將α,φ,θ分別劃分為11個(gè)區(qū)間,每11個(gè)區(qū)間的概率和為100 %,33 個(gè)區(qū)間概率總和為 300 %,如圖4。

圖4 點(diǎn)特征直方圖
FPFH算法流程:
步驟1:對(duì)于每個(gè)查詢點(diǎn)pq,計(jì)算出該待求點(diǎn)與其所有鄰域點(diǎn)之間的相對(duì)關(guān)系,記作SPFH(pq);
步驟2:重新確定每個(gè)點(diǎn)k鄰域,并通過(guò) SPFH特征,來(lái)估計(jì) FPFH特征,如下式所示
(1)
式中wk為第K個(gè)鄰域點(diǎn)SPFH 特征的加權(quán)值。1/wk為pq與其第K個(gè)鄰域點(diǎn)的距離值,用于表示點(diǎn)對(duì)(pq,pk)的關(guān)系。
2.2 旋轉(zhuǎn)位移矩陣求取
在Rd空間中有兩個(gè)點(diǎn)集P={P1,P2,…,Pn}和Q={q1,q2,…,qn},要找到這兩個(gè)點(diǎn)集之間的旋轉(zhuǎn)位移矩陣,可以把旋轉(zhuǎn)位移用R和T表示
(2)
計(jì)算旋轉(zhuǎn)位移矩陣的步驟:
步驟1:計(jì)算兩個(gè)點(diǎn)集的重心
(3)
步驟2: 計(jì)算兩個(gè)點(diǎn)集中每一個(gè)點(diǎn)減去重心后的偏移向量
xi=pi-,yi=qi-,i=1,2…,n
(4)
步驟3:計(jì)算X和Y的協(xié)方差矩陣
S=XTY
(5)
式中X和Y由向量xi,yi構(gòu)成。
步驟4:對(duì)S進(jìn)行奇異值分解,根據(jù)性質(zhì)可得旋轉(zhuǎn)矩陣
S=U∑VT
(6)
R=VUT
(7)
步驟5:由旋轉(zhuǎn)矩陣可得位移
t=-R
(8)
2.3 RANSAC算法
RANSAC算法是一種通過(guò)對(duì)觀測(cè)數(shù)據(jù)進(jìn)行隨機(jī)采樣來(lái)估計(jì)模型參數(shù)的學(xué)習(xí)方法。給定一個(gè)數(shù)據(jù)集,其數(shù)據(jù)元素包含正確數(shù)據(jù)(inliers)和異常數(shù)據(jù)(outliers),RANSAC使用投票方案來(lái)尋找最佳擬合結(jié)果。
算法:RANSAC(P,Q)
Input:P,Q
Output:Rtfinal
Paranms:k,d,inlier
1:fori←1 tokdo ∥k為采樣次數(shù)
2014年,在全國(guó)留學(xué)工作會(huì)議上習(xí)近平重點(diǎn)指出:“留學(xué)工作要適應(yīng)國(guó)家發(fā)展大勢(shì)與黨和國(guó)家工作大局……培養(yǎng)造就更多優(yōu)秀人才,努力開(kāi)創(chuàng)留學(xué)工作新局面。”習(xí)近平這番話也為接下來(lái)的“一帶一路”背景下高校來(lái)華留學(xué)生教育工作指明了方向。目前在“一帶一路”背景下,我國(guó)高校為加強(qiáng)來(lái)華留學(xué)生教育采取很多有效教育措施,具體措施主要如下。
2:{p1,p2,p3}=Random(P)
3:{q1,q2,q3}=Fpfh{q1,q2,q3}
4:Ifd{p1,p2,p3}/d{q1,q2,q3}>d
Then∥由3個(gè)點(diǎn)構(gòu)成的三角形邊長(zhǎng)比,d為比的最大閾值
5:Rt=Rt{p1,p2,p3,q1,q2,q3}
∥利用2.2節(jié)算法求解旋轉(zhuǎn)位移矩陣
6:Q1=RP+t∥將初點(diǎn)云移動(dòng)
7:Inlier=Euclidean(Q1,Q)
∥以兩點(diǎn)云集的歐式距離作為得分
8:Rtfinal←inliermin(Rt)
∥將得分最低的旋轉(zhuǎn)位移矩陣作為所得
3 實(shí)驗(yàn)與結(jié)果分析
3.1 雜亂無(wú)遮擋環(huán)境實(shí)驗(yàn)
在無(wú)遮擋的環(huán)境中,首先對(duì)環(huán)境進(jìn)行濾波處理,分割出目標(biāo)物體,分別使用本文算法、NDT算法和ICP算法在相同的環(huán)境對(duì)同一物體進(jìn)行位姿估計(jì),物體以任意姿態(tài)放置,如圖5。3種算法位姿估計(jì)誤差如圖6所示。
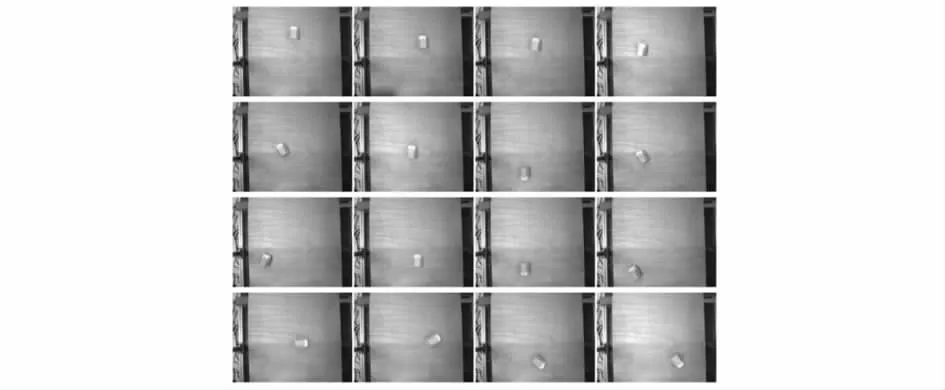
圖5 目標(biāo)物體任意姿態(tài)放置

圖6 3種算法位姿估計(jì)誤差
由圖6可以看出:在16種任意姿態(tài)下,NDT算法對(duì)旋轉(zhuǎn)量的估計(jì)誤差變化不大,但對(duì)平移量的誤差估計(jì)出現(xiàn)了起伏。ICP算法對(duì)個(gè)別位姿會(huì)出現(xiàn)較大的偏差。針對(duì)任意姿態(tài),經(jīng)過(guò)多次實(shí)驗(yàn),本文提出的算法位姿估計(jì)的平移量誤差為4.86 mm,旋轉(zhuǎn)量誤差為1.96°;NDT算法的平移量誤差為8.86 mm,旋轉(zhuǎn)量誤差為6.16°;ICP算法平移量誤差為10.03 mm,旋轉(zhuǎn)量誤差為12.49°。
3.2 機(jī)械臂遮擋目標(biāo)物體實(shí)驗(yàn)
針對(duì)Eye-to-Hand模型易出現(xiàn)機(jī)械臂遮擋目標(biāo)物體的問(wèn)題,本文設(shè)計(jì)了實(shí)驗(yàn),機(jī)械臂在不同遮擋率下遮擋住物體,利用本文算法、NDT算法和ICP算法進(jìn)行位姿的估計(jì)。實(shí)驗(yàn)結(jié)果如圖7。
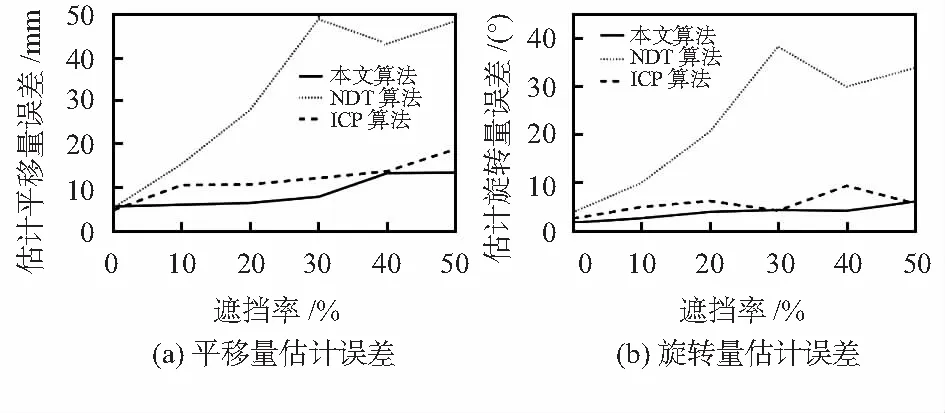
圖7 不同遮擋率下的位姿估計(jì)誤差
由圖7可以看出:隨著遮擋率的增高,3種算法對(duì)平移量和旋轉(zhuǎn)量估計(jì)的誤差都在增加。由于NDT算法利用概率分布來(lái)計(jì)算位姿并沒(méi)有計(jì)算點(diǎn)云的特征,在遮擋導(dǎo)致物體信息缺失情況下對(duì)物體位姿估計(jì)的效果并不好。ICP算法通過(guò)歐氏距離來(lái)進(jìn)行位姿估計(jì),但同樣缺失點(diǎn)云特征,在物體信息缺失時(shí)易出現(xiàn)偏差。本文提出的算法是利用點(diǎn)云的特征信息來(lái)進(jìn)行位姿估計(jì)的,所含有的信息量豐富,即使部分信息缺失也能有效估計(jì)位姿。圖8和圖9是在10%遮擋率下3種算法對(duì)位姿估計(jì)的效果。其中圖8中淺色的點(diǎn)云表示初始位姿,深色點(diǎn)云為彩色圖像轉(zhuǎn)換后的點(diǎn)云。圖9中淺色點(diǎn)云是將初始點(diǎn)云經(jīng)過(guò)估計(jì)的位姿移動(dòng)后得到。可以看到本文初始點(diǎn)云經(jīng)過(guò)旋轉(zhuǎn)位移與移動(dòng)后的點(diǎn)云基本重合。而NDT和ICP算法的重合效果較差。
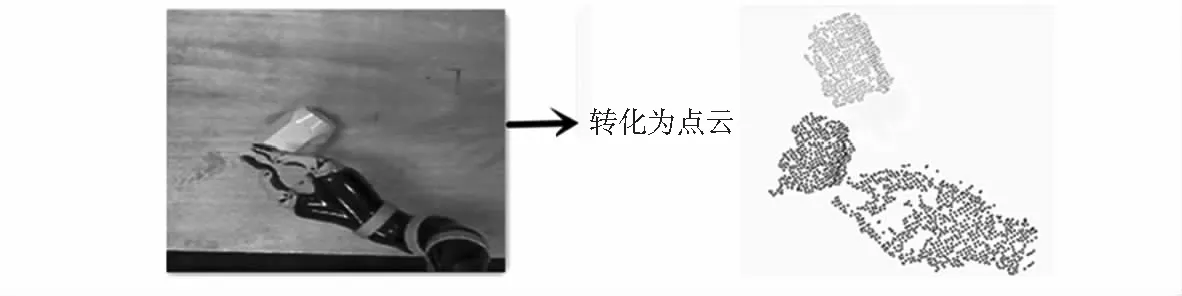
圖8 采集點(diǎn)云數(shù)據(jù)

圖9 3種算法估計(jì)效果
4 結(jié) 論
通過(guò)與NDT算法和ICP算法進(jìn)行對(duì)比實(shí)驗(yàn),本文提出的算法在對(duì)位姿估計(jì)精度和穩(wěn)定性上都優(yōu)于NDT算法和ICP算法,并在Eye-to-Hand模型中機(jī)械臂存在遮擋物體問(wèn)題上對(duì)位姿估計(jì)的效果也要優(yōu)于其他兩種算法。在后續(xù)的工作,可以在保持位姿估計(jì)的精度情況下,對(duì)算法的時(shí)間復(fù)雜度進(jìn)行優(yōu)化,使算法的實(shí)時(shí)性效果更優(yōu)。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
