改進降噪自編碼的航空發動機氣路故障診斷*
2019-06-24 10:25:18洪驥宇王華偉車暢暢倪曉梅
振動、測試與診斷 2019年3期
洪驥宇, 王華偉, 車暢暢, 倪曉梅
(南京航空航天大學民航學院 南京,210016)
引 言
發動機是飛機的心臟,實時而準確地進行發動機的狀態監測與故障診斷,即可以提高維修效率、降低維修成本,也有利于做出正確的飛行決策,提高飛行安全。但由于發動機本身復雜的結構和惡劣的工作環境,存在著大量非線性和帶有噪聲監測特征,加上其故障模式多樣及存在著關聯故障、競爭失效等諸多情況,準確地進行故障診斷較為困難。
目前,進行航空發動機故障診斷一般分為3種方法:基于模型、基于知識及數據驅動的故障診斷方法。基于模型的故障診斷方法方面,如張鵬等[1]使用球面采樣平方根無損卡爾曼濾波器進行發動機的故障診斷,在傳感器故障的情況下仍取得良好效果。Lu等[2]使用擴展卡爾曼濾波器進行了發動機的狀態估計。基于知識的故障診方法,如陳果等[3]將鐵譜、光譜及試車臺數據知識規則整合為專家系統進行了發動機磨損故障診斷。趙薇等[4]使用故障樹結合對球磨機振動信號的分析,對其機械部件進行了故障診斷。
隨著航空發動機的結構越來越復雜,準確的性能模型、知識規則越來越難建立與確定,而基于數據驅動的智能診斷技術能滿足時變非線性的診斷要求,使用越來越廣泛。如崔建國等[5]使用動態主元分析提取特征并使用改進的SVM進行發動機的滑油系統的故障診斷。Lu等[6]使用RBF網絡進行發動機氣動故障診斷,最后結合D-S證據理論與SVM建立了氣路融合診斷架構。Benyounes等[7]運用自適應模糊神經網絡建立了工作系統的數學模型,通過該模型進行故障診斷。Nozari等[8]使用多層感知器(multi-layer perception,簡稱MLP)神經網絡對燃氣渦輪機建立了故障診斷與隔離方法。Zhao等[9]使用粗糙集預先處理數據并建立粗糙診斷模型,最后根據得到的結果使用BP神經網絡進行故障診斷。曹沖鋒等[10]將泛化搜索引入SVM的超參數選擇中,利用改進的模型進行了故障診斷。
目前,基于數據驅動的故障診斷大多使用BP,RBF,SVM等機器學習算法來實現。這些算法使用標簽數據進行訓練學習,提取出故障特征從而進行分類,實現故障診斷。機器學習算法為以航空發動機為代表的復雜大系統進行故障診斷提供了可能,但也有其局限性和缺點:a.從傳感器上直接得到的數據非線性極強,加上惡劣環境帶來的噪聲污染,使用這些淺層網絡進行診斷會被噪聲影響且難以挖掘數據之間的深層關系;b.淺層網絡本身也有自己的局限,SVM對噪聲較為敏感容易產生過擬合;c.BP等傳統神經網絡在訓練過程中容易產生局部最優。
深度神經網絡是最近機器學習研究的熱點,由于其非線性表達能力極強,能夠挖掘數據之間深層關系得到內在特征,已在圖像識別、自然語言處理方面等領域取得突破進展[11-12],在故障診斷方面也有了一些進展。雷亞國等[13]使用深度信念網絡對多級齒輪傳動系統進行了健康狀態識別。Li等[14]在對齒輪箱研究時,使用深度信念網絡進行了故障診斷。筆者擬結合深度學習網絡在其他領域應用的成果,結合航空發動機氣路故障診斷的特點,采用降噪自編碼器DAE通過貪婪逐層訓練算法逐層提取特征,最終得到一個能夠表征數據深層特征且更適合故障診斷的特征向量,然后將特征導入經過改進螢火蟲算法進行優化的RBF網絡進行故障診斷。本模型的優點在于通過深度結構、降噪訓練,經過非監督學習得到了更能表征故障類型且更為魯棒的深層特征,更利于分類;同時在原有DAE的基礎上進行改良,分類器采用FRBF,分類性能進一步提高,能夠更為準確地進行故障診斷。
1 航空發動機氣路故障診斷問題
常見的氣路故障有以下幾種:積垢、腐蝕與侵蝕、熱變形、物體打傷以及密封件疲勞等。但無論哪種故障都必然會導致某部件的性能下降,如壓氣機葉片的磨損會導致壓氣機效率的下降。部件性能的下降,也會使得測量參數跟著變化而偏離設計值,如圖1所示[15]。為了檢測故障,基于模型的方法一般是利用搭建好的模型的輸出量與系統輸出做偏差比較,以此來判斷是否存在故障并定位故障原因。
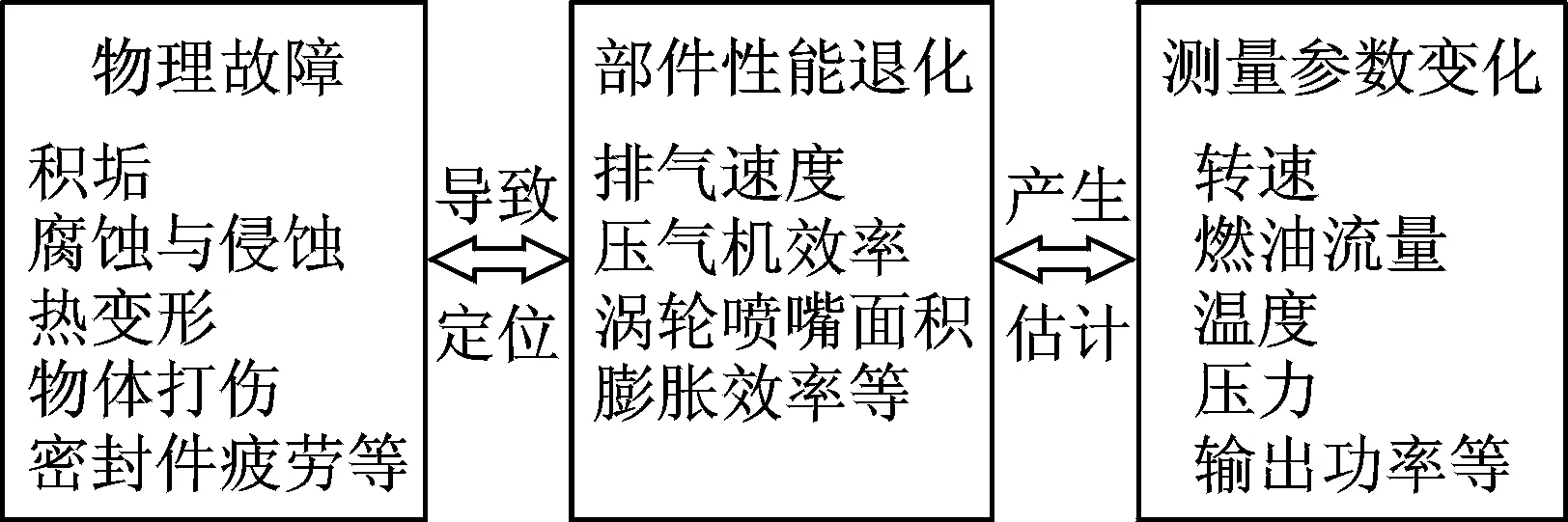
圖1 航空發動機氣路診斷分析Fig.1 Analysis of gas path diagnosis for aero-engine
如圖1所示,反映部件性能退化的效率等參數被稱為性能參數,這些參數一般難以直接測量;而轉速、穩定、壓力及燃油流量等可以直接測量的參數,被稱為測量參數。筆者通過測量參數以及學習參數和故障之間的關系進行故障診斷。測量參數越多,越能夠反映發動機當前工況,從而提高診斷率。但是由于傳感器技術等原因,能測量的參數有限,并且在選取測量參數時需要遵守以下幾個原則[16]:a.能夠顯著反映發動機狀態;b.對故障敏感;c.測量參數之間相關性小。
考慮到發動機的健康管理與實際工作中的狀態監測,選擇以下4個參數進行故障診斷:排氣溫度EGT、燃油流量FF、高壓轉子轉速N2和壓轉子轉速N1。
2 航空發動機氣路故障診斷方法設計
隨著發動機越來越復雜,加上傳感器技術與人工智能技術的發展,無需依賴模型精度的后者越發得到重視。但是,后者雖然得到了廣泛的使用,仍然存在一些問題:a.相似故障由于測量參數類似,很難加以區分;b.測量參數中存著的噪音,對診斷精度有一定干擾;c.發動機具有很強的非線性,傳統算法很難挖掘數據間的關系;d.傳統算法自身存在一定局限,如SVM易受噪聲干擾,BP易產生局部極值。針對上述問題,筆者使用改進的DAE算法進行航空發動機氣路故障診斷。
2.1 氣路故障診斷算法框架及流程
筆者使用的改進DAE算法分為兩個部分,DAE部分和FRBF部分,如圖2所示。
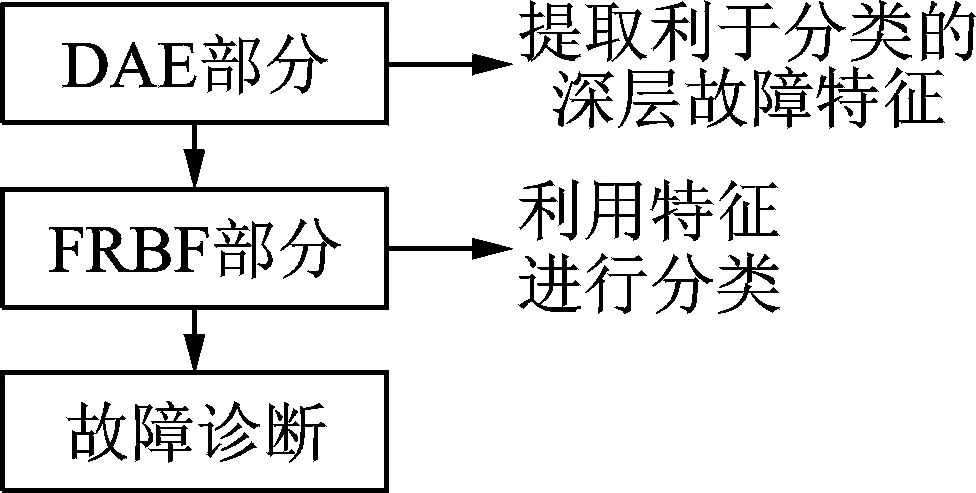
圖2 算法框架Fig.2 Algorithm framework
DAE部分利用深層結構以及貪婪逐層訓練算法,并通過在輸入層加入“損傷噪聲”訓練出利于分類且更為魯棒的深層故障特征。FRBF則是通過引入慣性權重與自適應光強因子的FA算法優化傳統的RBF網絡,得到分類性能更為優異的FRBF。最終,利用DAE部分得到的特征,使用FRBF進行故障診斷。
2.2 DAE
Hinton等[17]通過對受限玻爾茲曼機(restricted boltzmann machines,簡稱RBM)進行堆疊并使用貪婪逐層方法訓練參數,取得了良好的效果。隨后根據這一思想,Bengio等[18]提出了堆疊自編碼(stack autoencoder,簡稱SA)。為了解決機器學習中的過擬合問題,降噪自編碼器應運而生[19]。
2.2.1 自編碼器
自編碼網絡分為3層:輸入層、隱含層和輸出層,而其核心部分又可分為編碼和解碼兩部分。網絡通過編碼部分將數據進行重構提取特征,又通過解碼部分將提取的特征進行還原與原輸入進行對比,通過迭代,最終得到能夠代表原始數據的特征參數。
編碼部分中映射函數為
y=fθ(x)=s(Wx+b)
(1)
其中:s(x)為編碼器的激活函數;θ為編碼參數,由具體的函數模型參數W和b組成;y為編碼后提取的特征。
解碼部分的映射函數可表示為
z=gθ′(y)=s(W′y+b′)
(2)
其中:gθ′(y)為解碼器的激活函數;θ′為解碼參數,θ′由W′和b′組成。
要想使得提取的特征盡可能地代表原始數據,則損失函數需取最小值。損失函數L(x,z)定義如下
(3)
(4)
2.2.2 貪婪逐層訓練算法
人腦在識別事物的過程中不止用了一層神經元,通過層層提煉事物的特征,才能準確地對事物進行判別。神經網絡也是這樣,每加入一層隱藏層,網絡的表達能力都得到了進一步的加強。為了得到事物的深層特征,必須使用深度結構的網絡來進行訓練。由于訓練算法的原因,在訓練深度網絡時不得不面對局部極值和梯度彌散等問題,這曾讓深度網絡停滯不前。而貪婪逐層訓練算法,讓這一問題得到了解決。
如圖3所示,以3層隱含層為例。h為第1隱含層,按照正常的訓練算法得到第1個隱含層的w和b之后,在進行第2隱含層訓練時,以第1隱含層的輸出作為第2隱含層的輸入,而在進行第3隱含層訓練時,則使用第2隱含層的輸出作為輸入。若隱含層數增加,也以此類推,最終得到能夠表達數據信息的深層特征值。

圖3 貪婪訓練的隱含層Fig.3 Hidden layer for greedy training
2.2.3 加躁訓練環節

(5)

圖4 降噪自編碼器Fig.4 Denoising autoencoder
2.3 FRBF網絡
2.3.1 RBF神經網絡
RBF神經網絡是一個3層前饋神經網絡,如圖5所示。
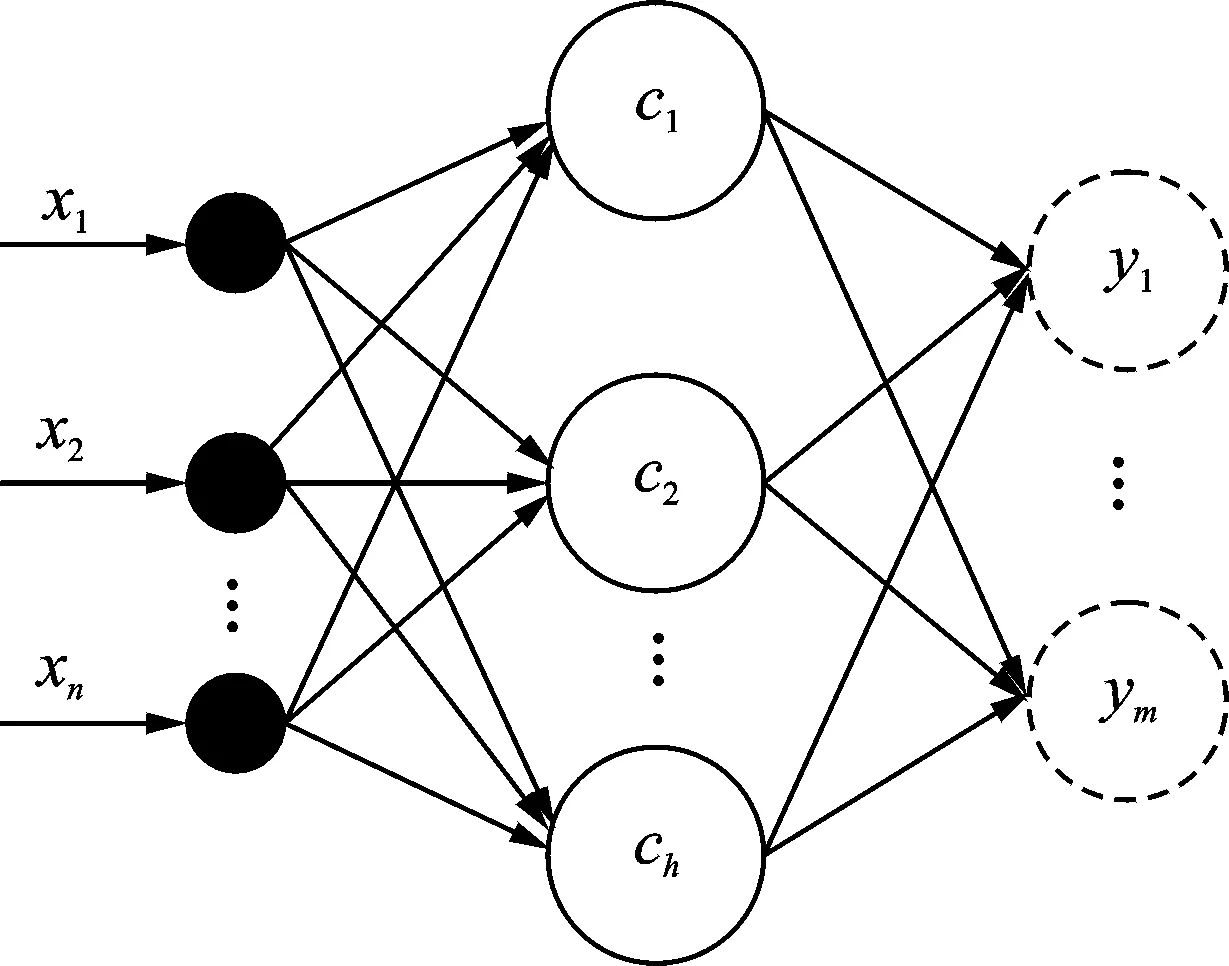
圖5 RBF網絡Fig.5 RBF network
其3層的節點數分別為n,h,m。輸入向量為X=[x1,x2,x3,…,xn]T,輸出向量為Y=[y1,y2,y3,…,ym]T。
當徑向基函數選用高斯函數時,則隱含層的輸出為
(6)
其中:i=(1,2,…,h);ci為高斯函數的中心;σi為高斯函數的方差。
在得到隱含層輸出之后,經進過權值分配,即可得到輸出層
(7)
其中:i=(1,2,…,h);j=(1,2,…,m);ωij為連接隱含層和輸出層的權值。
2.3.2 螢火蟲優化算法
螢火蟲算法[20]的基本思想是將每種解決方案當成螢火蟲,而每一種方案的優劣程度決定螢火蟲的亮度,而越亮的螢火蟲會吸引周圍的螢火蟲向它靠攏。隨著不停迭代,大部分的螢火蟲會聚集到最亮螢火蟲的周圍,從而得到最優解。
螢火蟲的亮度為
I=I0e-γrij
(8)
其中:I0為螢火蟲自身的亮度,它取決于需要尋優的適應度;rij為任意點到螢火蟲間的距離;γ為光強吸收因子,用來決定螢火蟲的光亮范圍。
定義吸引度為
(9)
其中:β0為距離為0時螢火蟲的吸引力;m為指定的指數參數,本研究定義為2。
若兩個螢火蟲i和j,其中一只亮度大于另一只,如I0(j)>I0(i),則i受到j的吸引而進行位置更新
xi(t+1)=[xi(t)+β(xj(t)-xi(t))+
(10)
其中:xi(t),xi(t+1)和xj(t)分別表示螢火蟲i的當前位置、下一時刻位置以及螢火蟲j的當前位置;rij為螢火蟲i與螢火蟲j之間的距離;α為步長因子;rand為[0,1]上服從均勻分布的隨機數。
2.3.3 改進的螢火蟲算法
由式(10)可以看出,位置更新公式由3部分構成,雖然第3部分引入了隨機部分,增加了尋優能力,但由于前2部分的系數固定,不能夠隨著迭代的進行而自適應變化,仍然存在著算法迭代初期尋優能力過弱容易陷入局部最優,迭代末期陷入在最優解附近震蕩的僵局。為此筆者在文獻[21]和[22]的基礎上,將慣性權重與自適應變化的光強吸收因子引入螢火蟲算法,具體改變如下
其中:τmax,τmin為最大權重、最小權重;t,tmax為當前迭代次數和最大迭代次數;γ0為初始的光強吸引因子;diter為一個在(0,1)范圍內的衰減系數。
通過調整慣性權重τ(t),在迭代初期得到較大的τ(t),此時算法的移動步長較大,全局搜索能力較強,不易陷入局部最優;而到了迭代后期得到較小的τ(t),這時算法的移動步長較小,逐步逼近最優值,而不會在最優值附近陷入距離震蕩。光強吸引因子γ可以看做是螢火蟲的吸引范圍,當其很小時的螢火蟲對很遠的螢火蟲也有著較強的吸引力,而當其很大時只能吸引一定范圍內的螢火蟲。在迭代初期使其較大,螢火蟲會聚向周圍較亮的螢火蟲而不會只向一個螢火蟲移動,這樣便能減小陷入局部極值的可能;而在迭代末期使其變大,這樣便可以從所有的范圍中甄選出最優解。
2.3.4 基于螢火蟲優化算法的FRBF
RBF網絡的性能主要取決于ci,σi,ωij、函數的中心、方差與權值,在使用原始RBF網絡進行分類時,往往不能得到最優的參數,為此使用改進之后的螢火蟲算法對RBF進行優化,從而提高其性能。具體步驟如下:
1) 對數據進行預處理和歸一化;
2) 初始化螢火蟲算法參數,如步長因子α、光強吸引因子γ和最大吸引度β0等;
3) 初始化螢火蟲種群的位置,以ci,σi和ωij進行編碼;

5) 計算螢火蟲種群個體中的各個亮度,確定吸引度與移動步長;
6) 得到新的螢火蟲個體亮度,并確認是否達到結束條件,達到則進行下一步,否則回到上一步;
7) 對最優個體進行解碼,得所需的RBF參數;
8) 利用訓練好的RBF網絡進行預測。
3 基于降噪自編碼和FRBF的航空發動機氣路故障算法
如圖6所示,基于降噪自編碼和FRBF的航空發動機氣路故障診斷流程如下。

圖6 診斷流程Fig.6 Diagnostic process
DAE部分:
1) 數據預處理并對數據進行歸一化處理;
2) 制作樣本,分為訓練樣本與測試樣本,并將其導入網絡;
3) 確定網絡各參數,如網絡層數、隱含層神經元數等;
4) 使用貪婪逐層訓練算法進行無監督訓練,在每一層進行訓練時,使用下式獲取各隱含層最優參數θ和θ′
5) 使用標簽樣本進行有監督的微調;
6) 滿足誤差條件則進行下一步,否則回到第3步;
7) 得到訓練好的DAE網絡。
RBF部分:
1) 使用DAE網絡中提取的特征值作為RBF網絡輸入;
2) 初始化FA算法參數如步長因子α、光強吸引因子γ和最大吸引度β0等,并初始化其種群;
4) 計算螢火蟲種群個體中的各個亮度,確定吸引度與移動步長;
5) 更新種群,并確認是否達到結束條件,達到則進行下一步,否則回到上一步;
6) 對最優個體進行解碼,得所需的RBF參數;
7) 將參數帶入RBF網絡;
8) 進行航空發動機氣路故障診斷。
4 實例分析
為了驗證筆者提出方法的有效性,利用從某型發動機采集到的故障樣本來檢驗算法的有效性。監測了所選取的4個參數EGT,FF,N2和N1進行故障診斷,并進行偏差化與歸一化處理,EGT采用絕對偏差,其余采用相對偏差,歸一化公式如下
(14)
使用參數進行的故障診斷類別如表1所示,每種故障有30個樣本,一共300個樣本。其中200個作為訓練樣本,另外100個作為測試樣本。
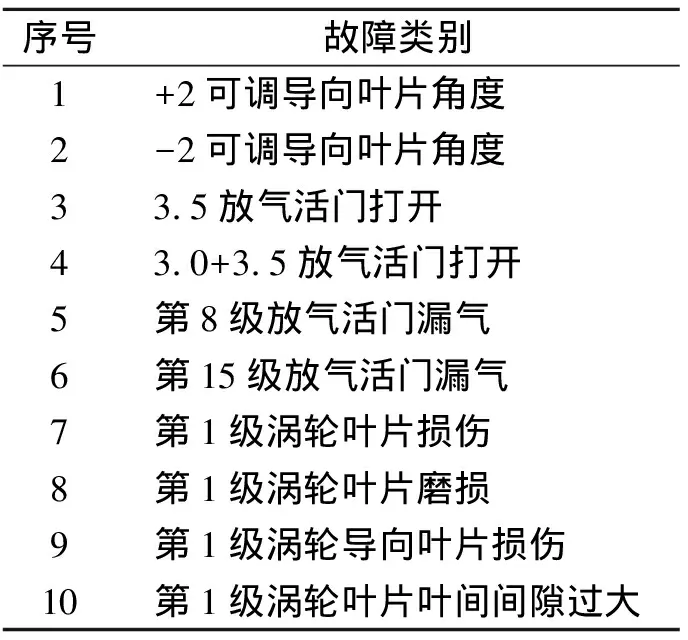
表1 故障類別
為了校驗提出算法DAE-FRBF的效果,筆者選擇原始DAE、螢火蟲算法優化的FRBF網絡、RBF及SVM進行比較,所有的程序都在Matlab中運行。其中原始DAE與提出算法的DAE部分是一致的,隱含層都為4層,神經元數分別為6-8-8-10,其中去噪參數設置為0.2,dropout為0.3,dropout是深度學習中有效減少過擬合的一種方法。單獨的FRBF與提出算法中的FRBF部分選擇的參數一樣,隨機因子α取1.5,光強吸引因子γ取1,最大吸引度β0取1,RBF的隱藏神經元數取13。沒有優化的RBF和SVM則分別使用Matlab自帶工具箱與臺灣大學林智仁開發的Libsvm工具箱進行運算。
為了減小樣本選擇對結果的影響,也為了避免算法的波動,選取10次樣本進行試驗,每次選取200個訓練樣本時(即每個故障抽取20個樣本),每種故障30個樣本中隨機選取20個作為訓練樣本,其余10個作為測試樣本。測試結果如表2所示。
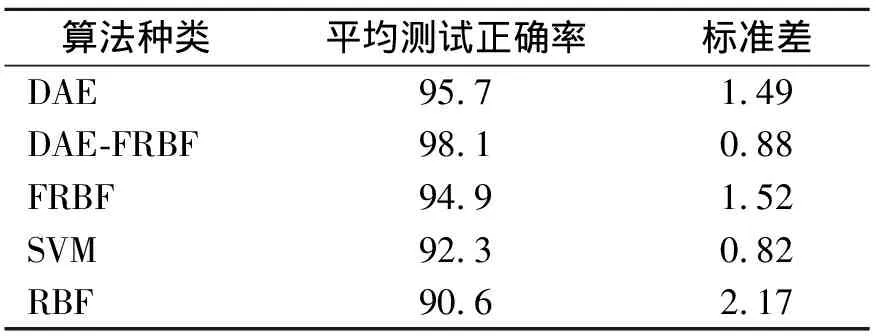
表2 各算法測試結果
由表2可知:沒有經過優化的RBF正確率最低,且測試結果的波動幅度也較大;而SVM雖然正確率不是很高,但其穩定性卻在5種方法中最佳;經過改進FA優化后的RBF效果有了明顯的改善,不僅正確率得到了大幅度提高,穩定性也有了提升,體現了良好的分類性能;正確率最高的是使用深度網絡提取特征的DAE與DAE-FRBF,其中又以后者為佳,診斷準確度和穩定性都有了提升,測試正確率達到了98.1%,標準差降低為0.88%。DAE-FRBF在DAE原有的基礎上進行了改良,進行分類診斷時沒有使用常用的SOFTMAX,而是利用FRBF進行診斷。
為了進一步探究算法的診斷精度,將每一種故障的平均診斷結果列入表3。由表3可知:DAE-FRBF在每一種故障的診斷中都取得了最高的正確率,絕大部分都達到了98%;FRBF與DAE在進行診斷時,兩者在除了故障5和6的其余故障中都取得了差不多的故障診斷正確率,而在故障5和6,FRBF都只取得了93%的正確率,與其他故障的診斷正確率相差頗大;SVM除了在故障1和10取得95%的診斷正確率之外,其余都與RBF一樣正確率偏低。通過觀察表中下面3種方法,它們都在診斷故障5和6時出現了正確率明顯降低,RBF的診斷正確率甚至降到了90%以下。將10次試驗對故障5和6的診斷錯誤樣本進行統計,如圖7所示。

表3 各類故障平均診斷結果

圖7 故障5和6誤診圖Fig.7 Misdiagnosed map for fault 5 and 6
由圖7可知,故障5和6可以認為是相似故障,使用表3下面3種算法進行診斷時,無法準確判斷出它們的類別,經常將故障5與6混淆。如使用SVM進行診斷時,在10次將故障5診斷錯誤中,有6次將其判斷為故障6;在9次將故障6診斷錯誤中,也有6次將其判斷為故障5。而使用前2種算法卻能有效地將兩者區分開來,在使用DAE-FRBF進行診斷時,將故障5誤判為故障6僅有1次,甚至沒有誤判故障6為故障5。這是由于在面對相似故障,獲取的傳感器參數極其相似,使用傳統的人工智能方法很難準確去判斷。而DAE與DAE-FRBF在使用深度結構網絡提取了深層特征之后,能夠使用更利于分類的特征向量進行故障診斷,從而誤診率大大降低。
為了進一步檢驗算法的魯棒性,對樣本數據使用Matlab中的awgn函數添加高斯白噪聲進行試驗,信噪比值分別取40,35,30,25和20,使用上面的5種算法進對比,結果如圖8所示。

圖8 不同信噪比下的診斷正確率Fig.8 Diagnostic accuracy of different SNR
由圖8可知,隨著噪聲加大,各個算法的正確率均有所下降, 其中SVM在噪聲比例上升到一定程度時,正確率的下降斜率變得很大,這是由于SVM將加入的噪聲當作正常參數進行了訓練,產生了過擬合。RBF與FRBF同樣在噪聲的影響下,正確率有了較大幅度的下降。而DAE與DAE-FRBF由于使用降噪自編碼器提取了更為魯棒的特征,雖然正確率也有所下降,但影響較小,體現了良好的魯棒性。
5 結 論
1) 通過降噪自編碼器提取深層特征,獲得了更容易進行故障診斷的特征向量,使用該特征向量DAE與DAE-FRBF較之其他方法擁有更高的診斷精度,在面對傳統人工智能方法難以判別的相似故障也取得了良好的診斷結果,算法的診斷效果也相當穩定。
2) 通過降噪自編碼器提取的特征不僅更利于分類,同時由于在進行無監督訓練時就已經進行了噪聲訓練,其提取的特征具有較好的魯棒,在對數據進行加躁后,相比其余幾種方法,仍擁有較好的診斷精度。
3) 筆者提出的DAE-FRBF在原始DAE的基礎上融入了FRBF。從診斷結果可以看出,FRBF較之RBF有了較大的提高,在除了故障5與6外診斷精度已經接近了DAE,擁有良好的分類性能。將其與DAE結合之后,DAE-FRBF在繼承原有優點的基礎上,診斷能力進一步提升,每一種故障都取得了最高的正確率,平均診斷正確率達到了98.1%,算法的穩定性也進一步提高。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48
