煤礦井下鉆錨機器人布網單元設計與仿真
2019-06-22 09:04:44馬宏偉王成龍尚東森薛旭升薛力猛
煤炭工程 2019年6期
馬宏偉,王成龍,尚東森,薛旭升,薛力猛
(西安科技大學 機械工程學院,陜西 西安 720000)
現階段影響煤礦井下巷道快速成型的主要原因在于初成型巷道永久支護慢[1]。煤礦巷道成型包括掘進和永久支護兩個作業,對煤礦井下巷道快速成型影響較大的是永久支護[2]。傳統的支護方式有人工支護方式,人工支護的方式是通過人工持鉆持網對巷道進行永久支護,由于人工支護方式的勞動強度大、支護效率低而且作業人員安全不能保障等問題,同時在進行人工支護時,巷道掘進作業需停止作業,嚴重影響了煤礦井下巷道成型的速度,不能滿足煤礦企業發展需求而逐漸被淘汰[3]。近年來,隨著科學技術的高速發展以及煤礦企業生產要求不斷提高,國內外許多企業和科研人員開始研制應用于煤礦井下巷道成型的設備[4],如三一重工等企業研發的多種類型的掘錨一體機,是通過對掘進機進行改造,實現煤礦井下巷道掘進和支護的機械化,縮短支護時間從而提高煤礦巷道成型的速度[5]。陜西陜煤韓城礦業對煤礦移動式臨時支護設備進行改造,在其上加裝支護設備來實現煤礦井下巷道永久支護機械化,提高永久支護效率提高煤礦巷道成型速度[6]。以上兩種支護方式都能縮短煤礦巷道成型的速度,但是都存在一定的問題,在巷道支護布網時,還需通過人工將支護片網搬運至頂網設備上同時工人是在空頂下進行作業,還存在工人的勞動強度大且人身安全不能有所保障等問題。
隨著機器人技術的不斷發展且為有效解決上述問題,提出了一種適用于煤礦井下巷道永久支護的鉆錨機器人。該機器人身上集成了永久支護的布網單元和鉆錨單元,通過單元間的相互配合完成巷道支護作業,鉆錨機器人簡易圖如圖1所示。與掘錨一體機、可移動式臨時支護設備相比,該機器人的最大的優點在于實現了布網、鉆錨的機器人化,減少支護時間從而提高煤礦巷道成型速度;同時降低工人勞動強度,保障了作業人員生命財產的安全。本文著重介紹了該機器人布網單元的結構設計,關鍵部件的承載受力分析,并對其進行運動學仿真分析,驗證結構設計的合理性和可靠性。
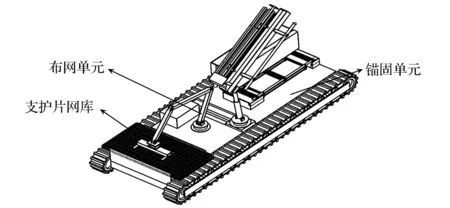
圖1 鉆錨機器人示意圖
1 鉆錨機器人布網單元的設計要求
為滿足煤礦井下巷道永久支護布網的需求,對鉆錨機器人的布網單元提出以下設計要求:①環境特點,該機器人應用于煤礦井下中,環境較為復雜、空間有限且較為封閉,還存有易燃易爆的氣體[7],則布網單元需防爆、結構緊湊;②抓取目標,將機器人前方網庫中的支護片網實現單張抓取,且應根據煤礦巷道常規使用的支護片網材料屬性要控制抓取力度防止破壞支護片網;③目標任務,在煤礦巷道有限的空間內,將抓取的支護片網穩定可靠的頂放到煤礦井下巷道煤壁上,完成布網單元作業。
2 鉆錨機器人布網單元的結構設計
布網單元和網庫都集成在鉆錨機器人的主體結構上,網庫位于機器人的最前方,布網單元則次之,這樣既確立了布網單元工作平臺也確定了抓取的位置,便于控制布網單元抓取以及完成作業。鉆錨機器人布網單元采用模塊化設計方法,主要是由機械手和機械手臂組成。機械手是對網庫的支護片網進行單張抓取,機械手臂是將抓取的支護片網頂放到煤礦井下巷道煤壁上,驅動機構主要是由液壓缸和防爆電機組成。工作原理是通過布網單元的機械手將網庫中的支護片網抓取,應用布網單元的機械手臂將支護片網頂放到巷道需支護的煤壁上。
2.1 機械手結構設計
支護片網抓取的關鍵部件是機械手其結構設計與支護片網規格相關。煤礦井下巷道支護片網的規格:鋼筋直徑為5mm、10mm,長×寬1500mm×2900mm、1000mm×2000mm,網格大小為100mm×100mm,以此種類型的支護片網進行機械手設計。鉆錨機器人布網單元的機械手由伸縮導軌、機械手指、機械指架、限位件、雙桿液壓缸組成。伸縮導軌作為機械手的主要承載工具,安裝有機械指架,機械指架通過圓柱銷將機械手指和機械手指上的限位件連接在一起,如圖2所示,伸縮導軌的設計主要是針對兩種不同規格的支護片網進行調節機械手抓取支護片網的位置,以達到抓取的穩定性;機械手指上的限位件的設計主要考慮每次只抓取單張支護片網,機械手指的運動軌跡如圖3所示。
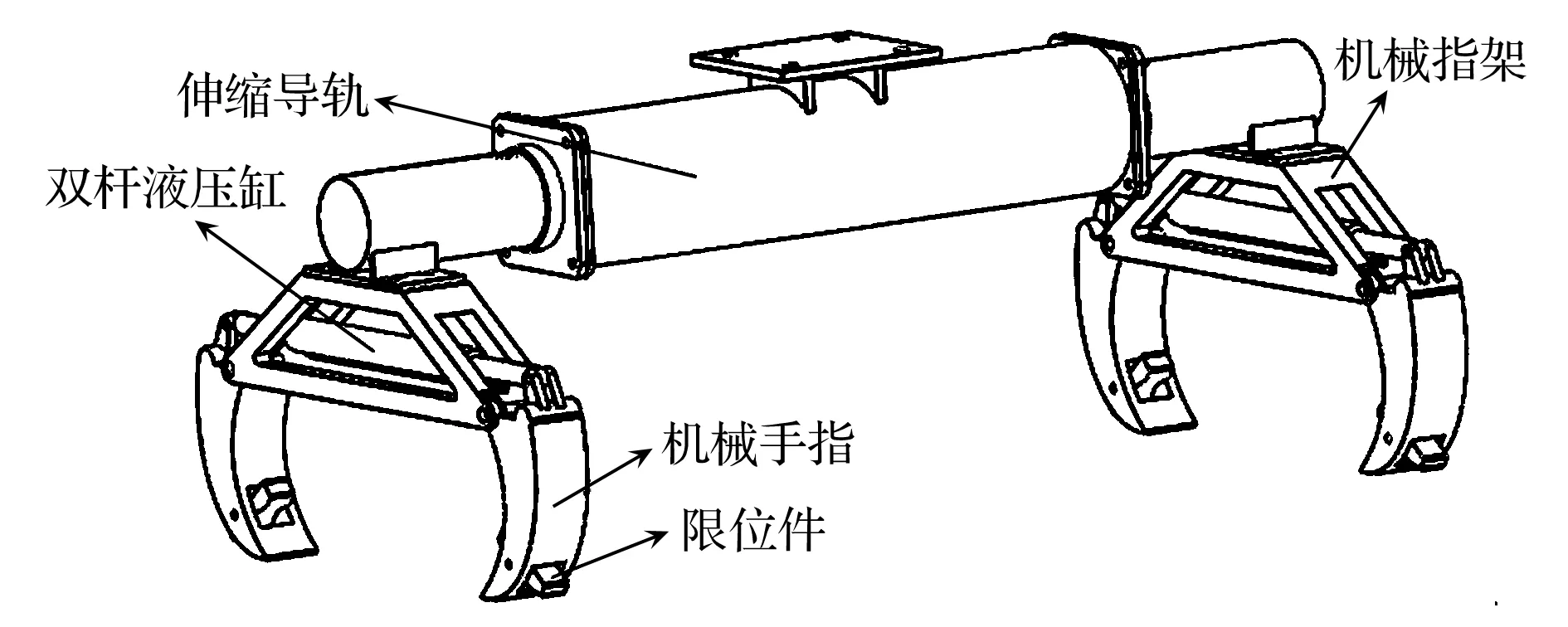
圖2 機械手
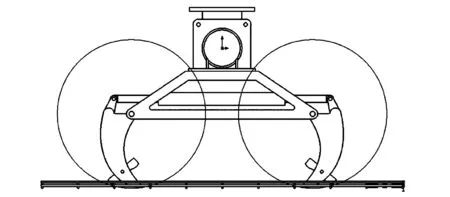
圖3 機械手指抓取軌跡
2.2 機械手臂選取
在煤礦巷道永久支護布網中,對于鉆錨機器人上網庫中的支護片網到達支護的位置,上頂需要3個自由度,側頂需要4個自由度;在進行巷道頂部進行布網時,需要布網單元實現對支護片網的抓取、升降、俯仰、回轉和移動5個動作,側幫進行布網時,需要抓取、升降、俯仰、回轉、回和移動6個動作,為了滿足上述的要求,則機械手臂需要6個自由度去完成作業,為完成煤礦巷道永久支護布網,基于一般煤礦巷道的尺寸(寬×高:5000mm×3000mm)進行選擇機械手臂的類型。
據現階段機械手臂的發展狀況,鉆錨機器人布網單元機械手臂可以選擇滿足布網單元需求的現有機械手臂,機械手臂按坐標系可以分為:直角坐標系、圓柱坐標系、極坐標型和關節型[8]。連桿機構為面接觸所受到的壓強小、能承受較大的載荷、抗沖擊能力強、適應能力強,也可以實現各種復雜的運動軌跡,且選用液壓驅動關節型三連桿機構的機械手臂[9],如圖4所示。
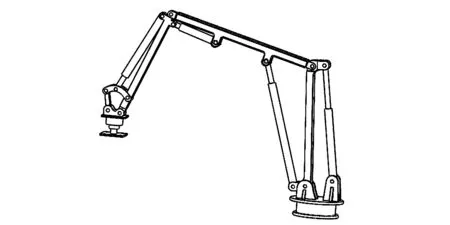
圖4 機械手臂
2.3 布網單元實現的方法
布網單元的SolidWorks三維裝配圖如圖5所示,首先確定煤礦井下巷道支護片網的規格,調整機械手的伸縮導軌使抓取能達到一定的穩定性,其次通過機器人行走機構到達煤礦井下巷道需永久支護的位置,調整布網單元機械手臂,使布網單元機械手到達鉆錨機器人網庫上方,再調整機械手臂的各個液壓缸使機械手下降,當機械手指上的限位件與網格邊界相接觸,產生一定的擠壓力后停止機械手下降,機械手指上的雙桿液壓缸伸長驅動機械手指進行抓取動作,當網格邊界與限位件和機械手指產生一定擠壓力時,停止液壓缸的伸長;再通過調整機械手臂攜帶機械手和支護片網頂放到煤礦井下巷道煤壁上,完成布網作業。

圖5 布網單元
3 布網單元機械手關鍵部件受力分析并進行有限元分析
3.1 機械手指受力分析
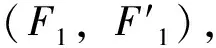
F4y+F4y’=G
(3)
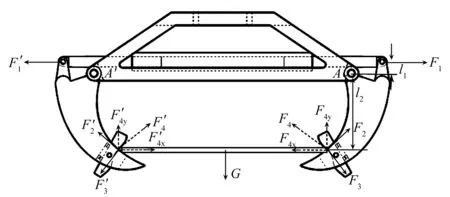
圖6 機械手指的受力情況
設計機械手指的材料選用45鋼,此材料有良好的剛度和韌性,能滿足機械手指長時間工作的要求,取安全系數ns=3,機械手指的許用極限值:
3.2 導軌受力分析
機械手導軌是布網單元主要承載機構也是布網單元的關鍵部件,要對其強度以及受力變形進行分析,首先根據導軌的受力情況進行受力分析,如圖7所示。導軌主要受兩端機械手指、機械指架、支護片網的重力。為了滿足機械手長時間穩定工作的需求,設計伸縮導軌的材料也選用45鋼。
F=g1+g2+G
(5)
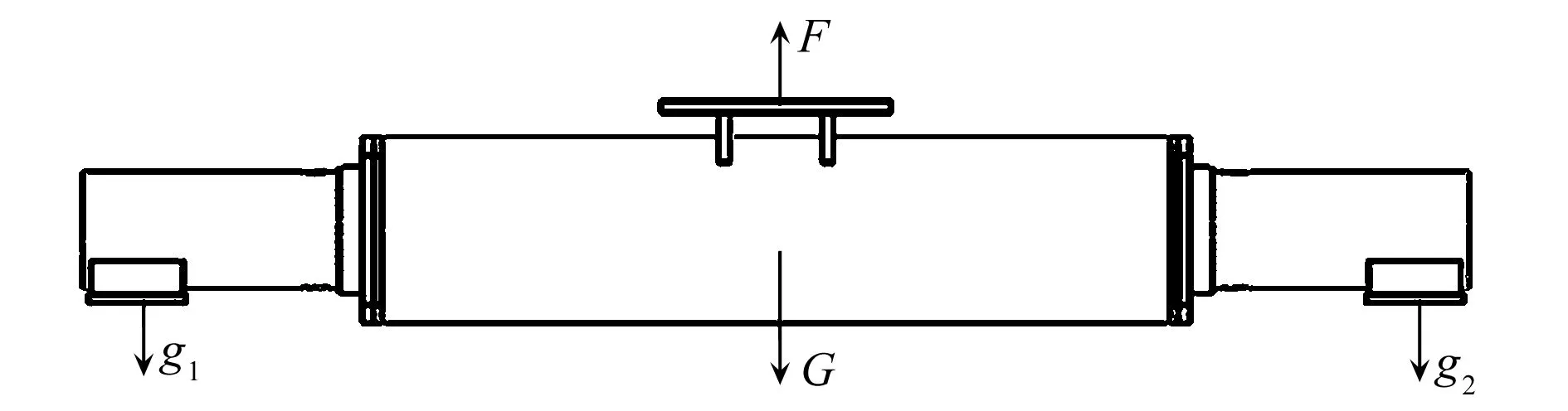
圖7 導軌受力情況
3.3 支護片網的受力分析
永久支護是將支護片網無損壞的頂放在煤礦井下巷道煤壁上,為了滿足煤礦井下支護的要求,要確定機械手抓取支護片網使的受力大小,如圖8所示,根據查閱的相關資料可知,支護片網的材料一般為CRB550級冷軋帶肋鋼筋或GB1499規定牌號的熱軋帶肋鋼筋,取安全系數ns=2,支護片網的許用極限值:
圖8 支護片網受力分析
3.4 有限元分析結果
為了保證鉆錨機器人布網單元的順利進行,對布網單元部件以及支護片網進行強度校核計算,主要是基于ANSYS對其進行有限元分析計算[11]。將部件的SolidWorks三維模型導出成ANSYS可以識別的文件,Workbench集成與ANSYS軟件中,可以進行對象的靜力學分析,得出分析對象的形變量和應力值。將模型導入到Workbench中以后,在Engineering Data中添加前面所確定的材料屬性,同時在Mechanical中設定分析對象合適的網格尺寸和網格類型,根據機械手和支護片網的實際受力情況進行添加載荷以及約束,在result中添加所需的分析結果并開始進行分析計算。
完成上述前期處理后,即可進行對象的有限元分析計算,得出對象的計算結果(形變以及應力特性),如圖9所示。通過形變圖(見圖9(a)(c)(e))可以看出,支護片網、機械手指、伸縮導軌的位移量,但是都在允許的范圍內,滿足布網單元強度要求;通過應力圖(見圖9(b)(d)(f))可以看出,支護片網的最大應力值約為28MPa,機械手指和伸縮導軌的最大應力值為67MPa、68MPa,三者的應力值都在許用應力范圍內,符合材料屬性的強度要求。
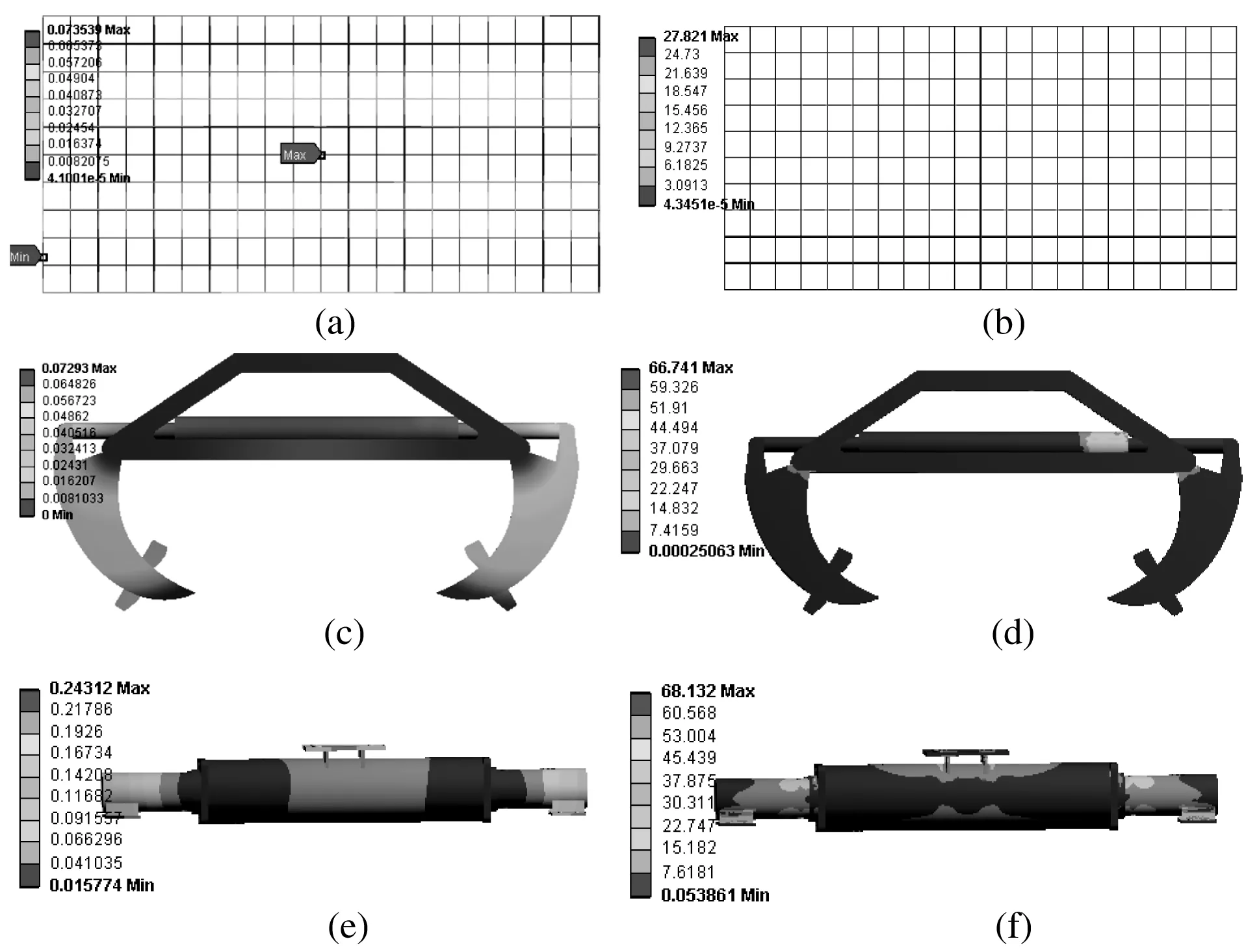
圖9 分析結果
4 基于ADAMS鉆錨機器人布網單元的運動學仿真
為了驗證設計的合理性以及提高實驗的效率,利用ADAMS建立布網單元虛擬機并對機器人布網單元的抓網、上頂和側頂進行運動學仿真。
4.1 鉆錨機器人布網單元虛擬機建立
鉆錨機器人布網單元的運動仿真以布網單元機械手、機械手臂以及支護片網的坐標系為基礎[12]。將SolidWorks模型導出成parasolid格式,在ADAMS中導入parasolid格式的模型并進行保存,在ADAMS中對模型再進行簡化處理,減少一些不必要的機構和連接,簡化的布網單元虛擬機如圖10所示,從而減少前期處理的時間以及仿真時的計算量[13]。之后要對簡化后的模型進行添加運動副和運動副的驅動,由于機械手臂關節運動以及機械手關節運動是有順序可言,因此運動副驅動函數選用的是step(x,x0,h0,x1,h1)進行設定運動副按順序運動。

圖10 簡化后的布網單元模型
4.2 運動仿真分析
按照機器人布網單元實際工作的運動情況進行仿真運動,仿真結果如圖11、12所示。
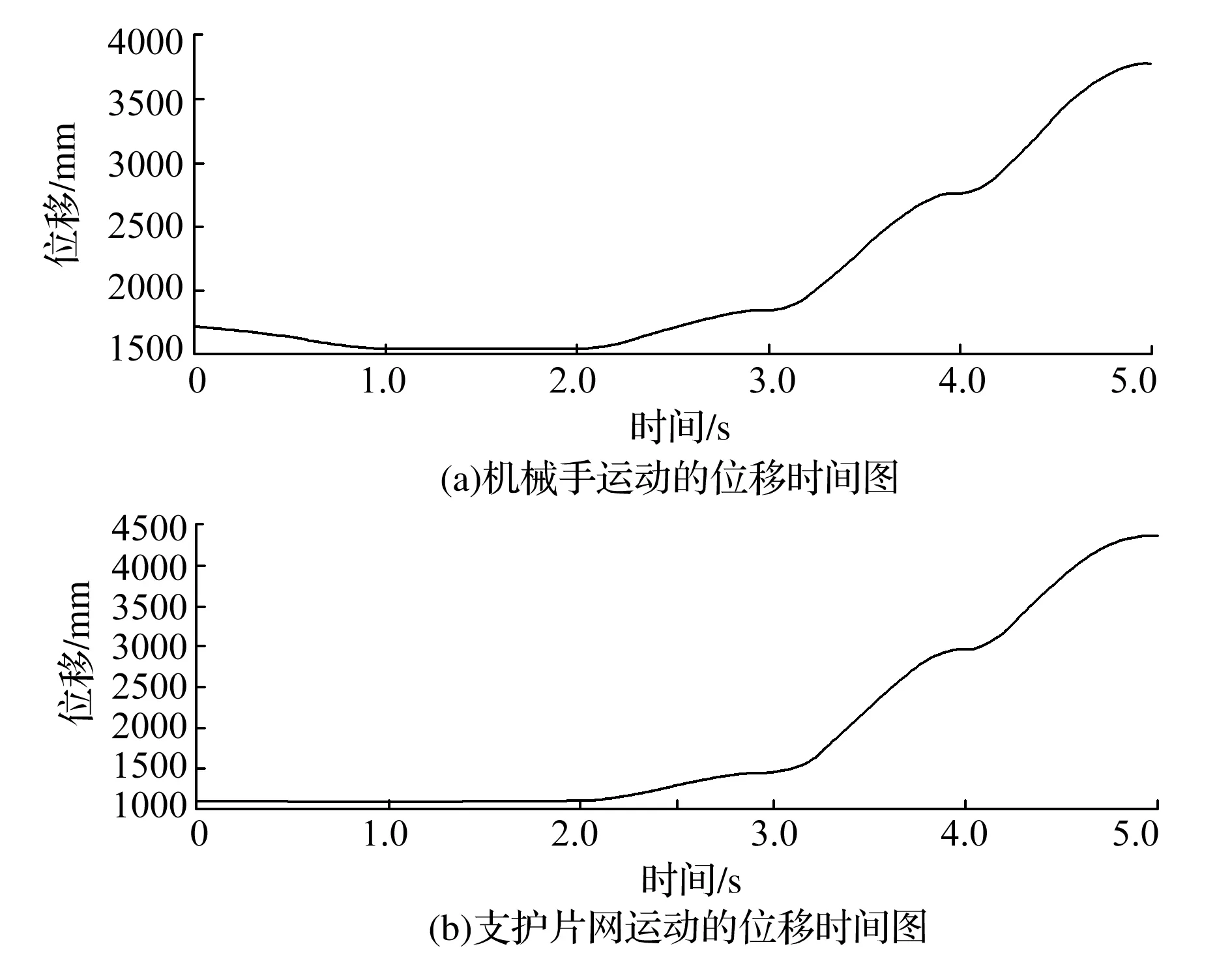
圖11 鉆錨機器人布網單元上頂曲線圖
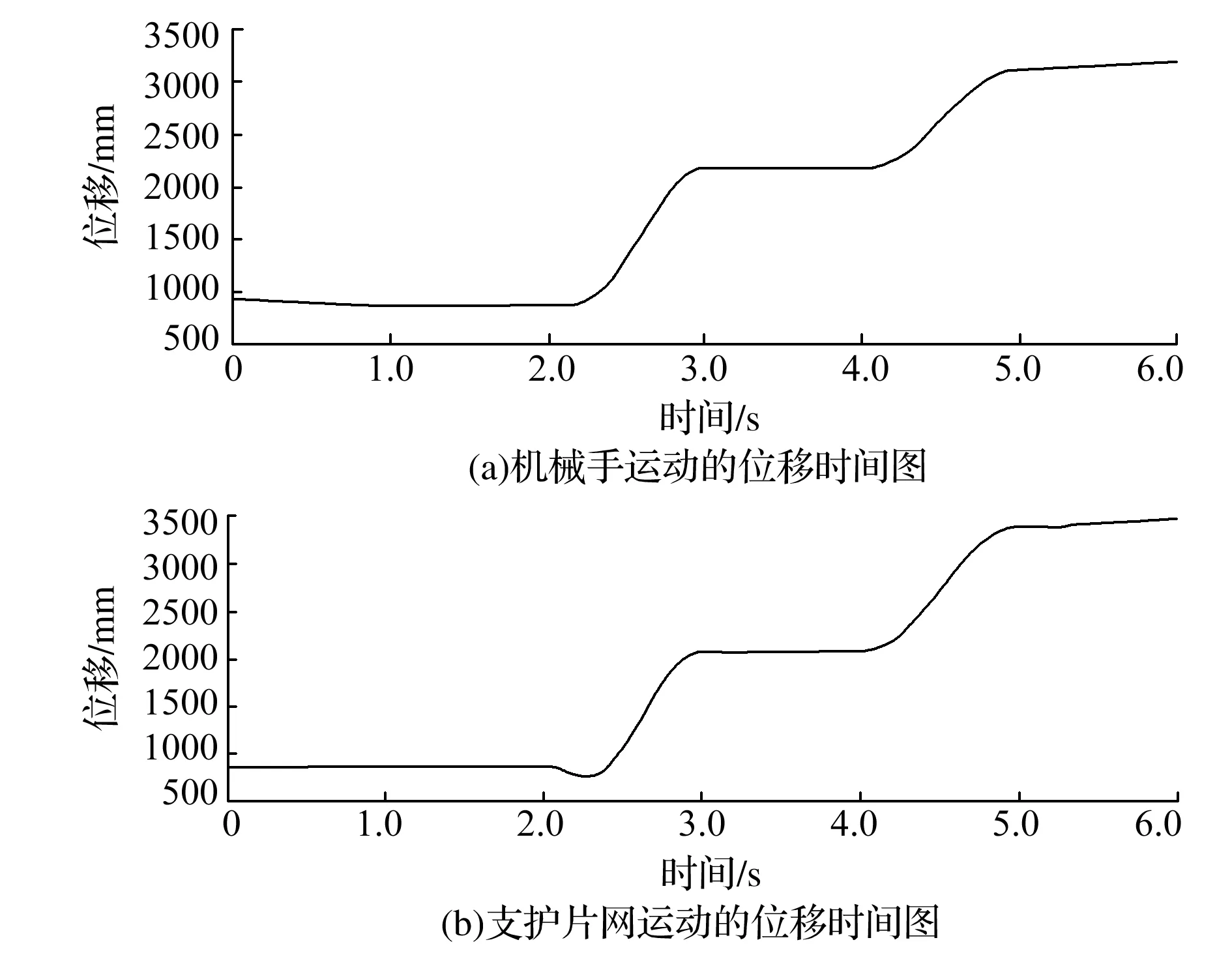
圖12 鉆錨機器人布網單元側頂曲線圖
通過對布網單元的上頂和側頂進行運動學仿真得到的軌跡圖可以看出,隨著時間的推移,支護片網的位移-時間圖與布網單元上頂、側頂時機械手的位移-時間圖在2s后曲線軌跡幾乎一致,支護片網的軌跡圖也沒有出現明顯的波動,支護片網的位移時間圖的最高位移小于3500mm和5400mm,根據以上可以得出:①機械手可以單張抓取支護片網并隨動;②在進行作業時機械手能穩定可靠的運輸支護片網;③選取的機械手臂將支護片網能夠在巷道中將支護片網頂放到支護位置。
5 結 語
對鉆錨機器人布網單元的關鍵部件進行設計以及選取,詳細的說明了布網單元一些部件的作用以及布網單元實現永久支護布網作業的實現方法;對布網單元關鍵部件機械手進行受力分析并進行有限元分析計算,對機械手的剛度和強度進行校核,校核結果都在許用范圍內,滿足布網單元布網要求;在ADAMS中建立鉆錨機器人布網單元簡化模型,并進行了運動學仿真分析,結果表明鉆錨機器人布網單元能單張抓取支護片網且能隨著布網單元穩定的將支護片網頂放到煤礦井下巷道煤壁上,驗證了鉆錨機器人布網單元結構的合理性。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
工業設計(2016年4期)2016-05-04 04:00:23
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07
